Mon contenu
Mon contenu Non spécifié
Non spécifié


 Posté par
Posté par Alors , oui ,le code au dessus , règle le problème . Que ce soit 100 , 400 ou 1000 , les moteurs font tous les tours demandés . Nickel !!
Merci pour ce code .
Pour faire le retour sur cette modif là :
void tournerBobine(bool avant) {
const int TOURS_PAR_BLOC = 10;
const long PAS_PAR_TOUR = 800;
const long PAS_PAR_BLOC = TOURS_PAR_BLOC * PAS_PAR_TOUR;
Si je demande 100 tours , il y a un temps d'arrêt tous les 10 tours , pour arriver à 100 . Bon voila c'est pour l'info .
- Mike118 aime ceci
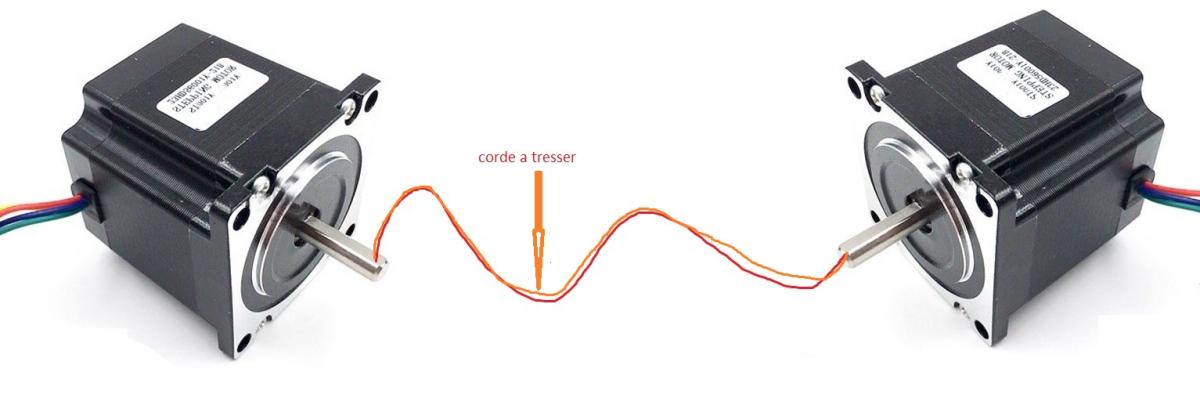
 J'appuis sur le bouton marche avant de la bobine , les 2 moteurs tournent en même temps mais en sens contraire .
J'appuis sur le bouton marche avant de la bobine , les 2 moteurs tournent en même temps mais en sens contraire .