Mon contenu
Mon contenu Non spécifié
Non spécifié





 Posté par
Posté par Hello,
I was just saying that the slicer is very good(simple to handle) but only working with Windows.
I will have a look at slice3r.org, particularly if it works with Deban.
Thank you.
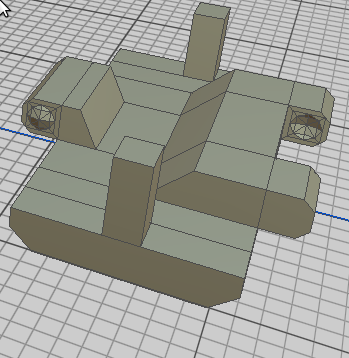
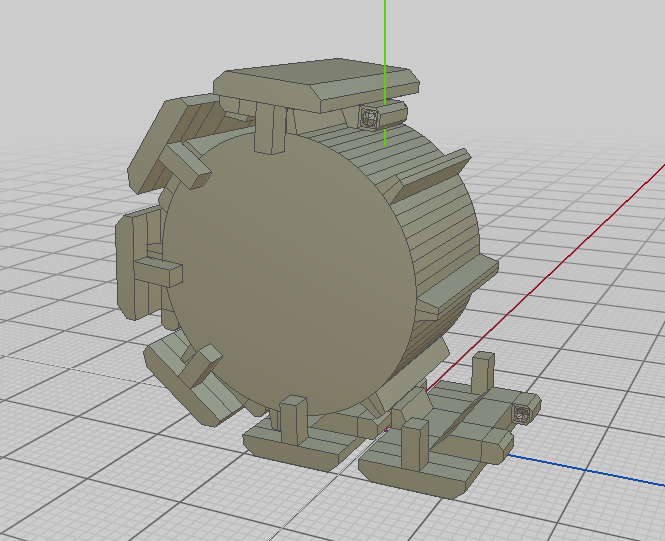
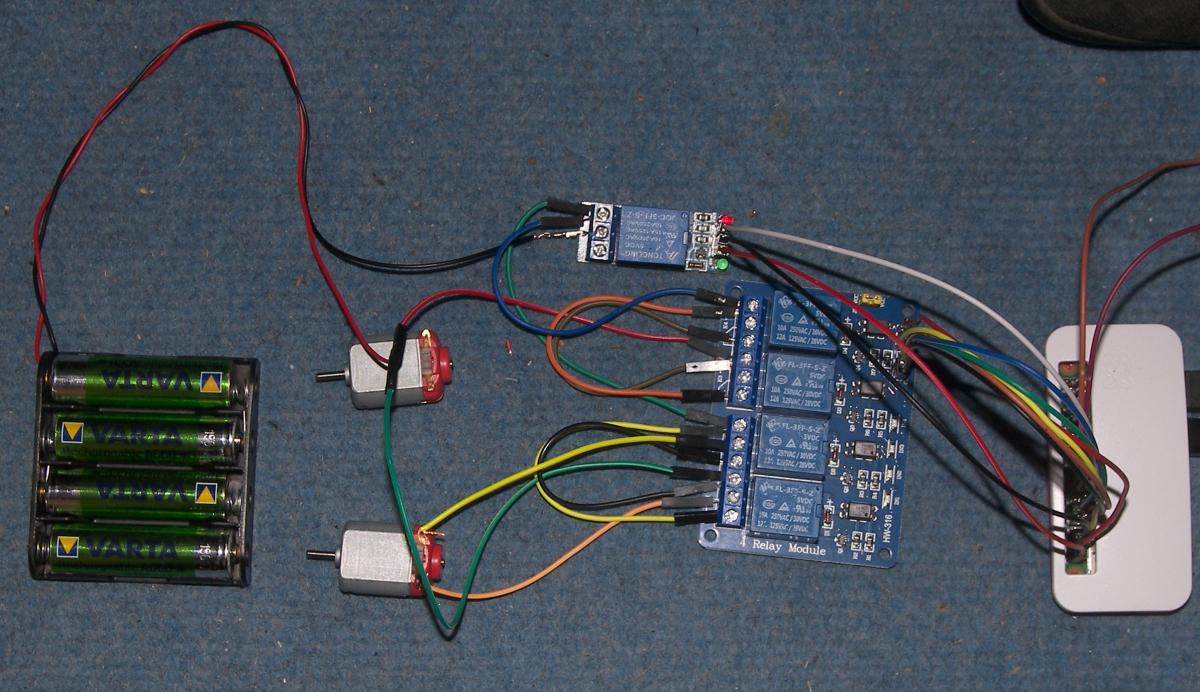
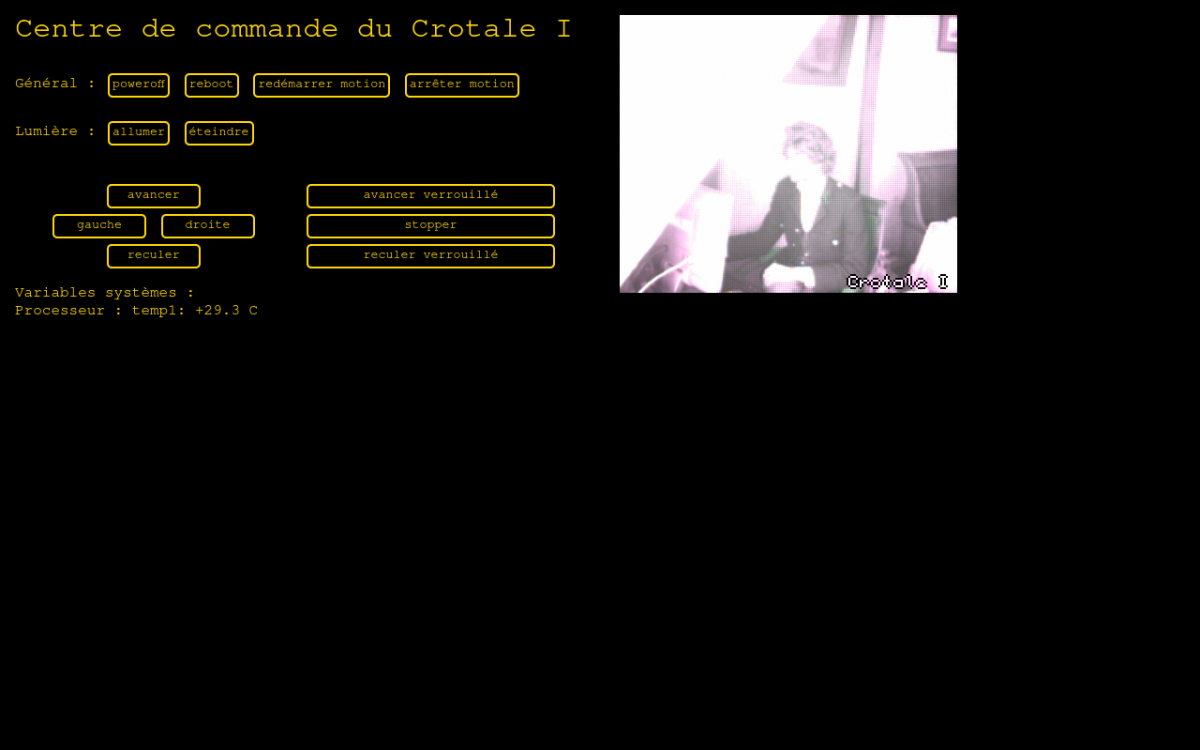
Your robot is very nice, it gives me inspiration. 
- TNERA aime ceci