 Mon contenu
Mon contenu Non spécifié
Non spécifié



Bonjour
Finalement les condensateurs ont effectivement pas changé grand chose et par manque de temps on a gardé le même solénoïde, les kicks sont peut-être pas surpuissants mais au moins ils font l'affaire !

 Posté par
- 07 juin 2024 - 05:07
Posté par
- 07 juin 2024 - 05:07
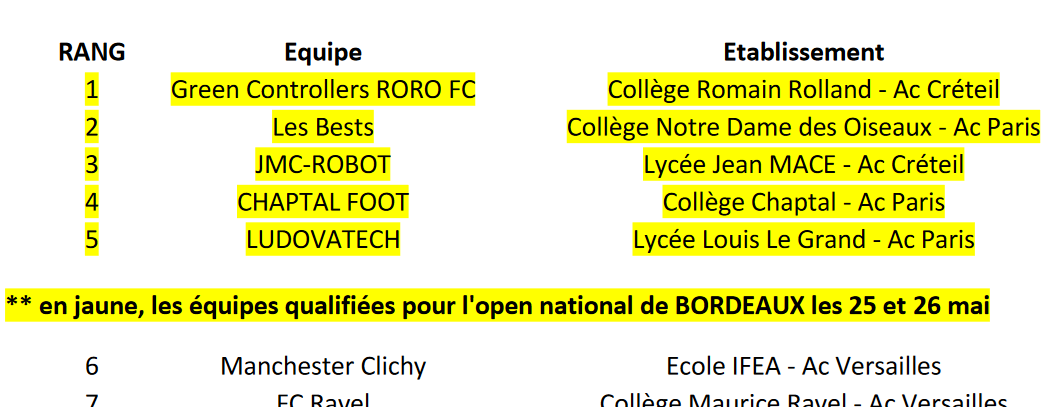
Comme prévu, nous avons participé à la compétition nationale de la Robocup Junior ! Au total, il y avait 8 équipes dans notre ligue (Soccer). Cette fois-ci nous avons eu le temps de préparer nos robots pour qu’ils fonctionnent comme ils sont censés le faire (même si on n’est jamais à l’abri de la Loi de Murphy). Les matchs sont constitués de 2 mi-temps de 10min chacune avec une pause de 5min entre les deux où les équipes changent de côté. Après une 1ère journée de matchs contre chacune des autres équipes, nous avons réussi à nous qualifier pour les demi-finales !

Les efforts ont payé puisque le lendemain nous sommes allés jusqu’en finale où nous avons remporté la victoire 10-1 !!
Nous sommes alors champions de France !!
Un petit tour des changements majeurs qui ont été réalisés par rapport à la dernière fois et qui ont rendu ça possible :
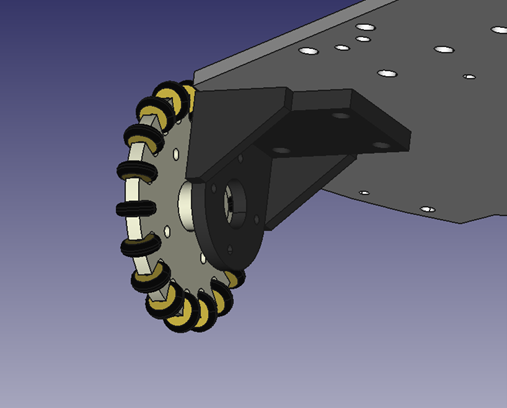
- Meilleure précision au niveau de l'adaptateur entre l'axe du moteur de 4mm et celui de la roue de 8mm, pour que celle-ci soit mieux maintenue. Il y a des petites différences entre le modèle 3D et la pièce en sortie d’imprimante, il faut donc faire plusieurs essais avec différents ajustements pour que faire en sorte que ça rentre pile

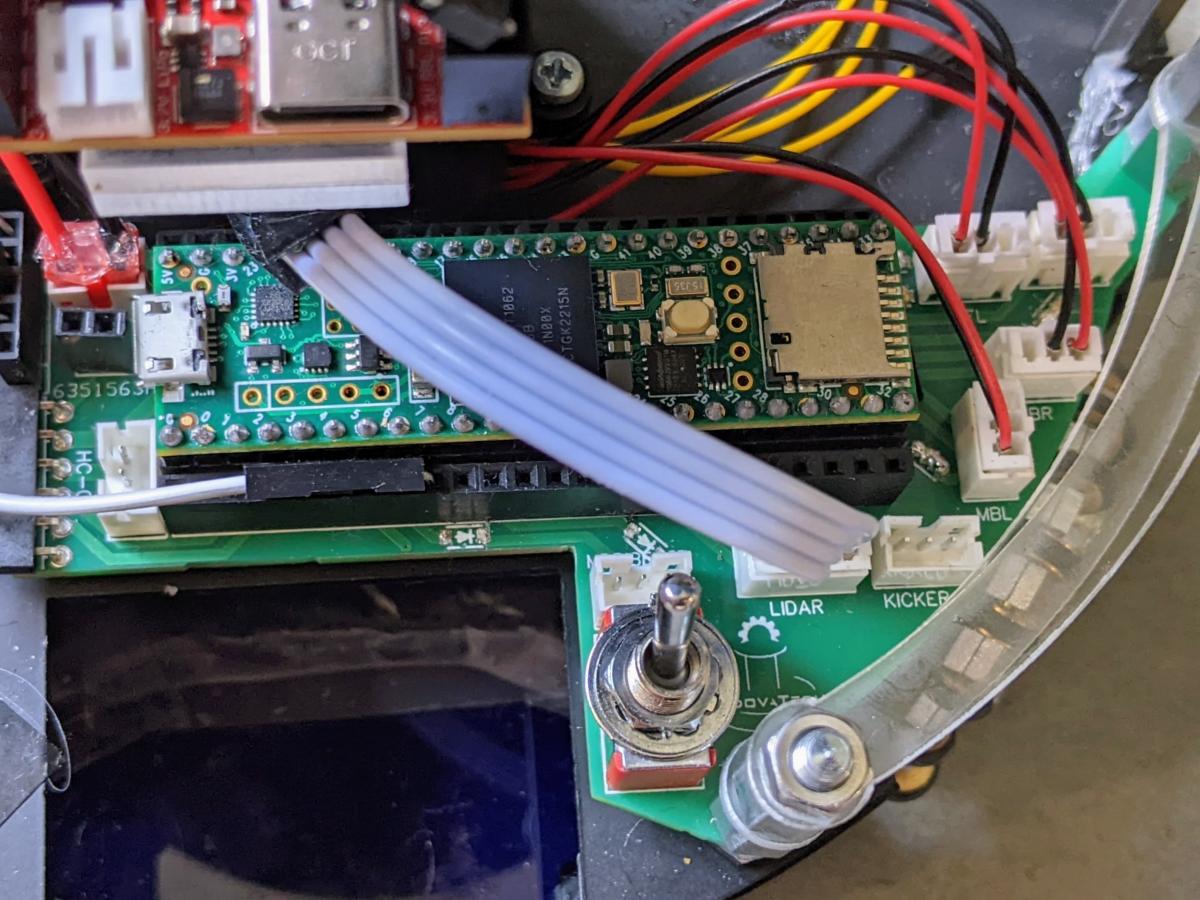
- Meilleure isolation des circuits 24V pour les moteurs et des circuits 5V de l'électronique de commande (aucun composant cramé cette fois!) avec une nouvelle carte spécialisée pour l'alimentation, et des câbles avec pour embouts des ports JST PH (fabriqués nous-mêmes avec une pince à sertir, qui sont relativement gros, ce qui permet d'avoir des câbles qui tiennent mieux et d'éviter les faux contacts entre-eux
- Fabrication de notre propre miroir avec un moule imprimé en 3D et poli avec des papiers ponce de grains de plus en plus fin. La surface est faite avec du papier réfléchissant un peu élastique pour épouser la forme du moule, vu que le miroir est hyperbolique (ça a l’air d’être la meilleur forme pour voir loin), on ne peut pas appliquer une surface plane non-élastique sans que ça fasse des plis


- Renforcement des supports pour les moteurs avec 2 supports triangulaires ajoutés sur les côtés (avoir une pièce en métal aurait été idéal, mais elle n’est plus disponible pour ce moteur). Avant ce support fracturait au niveau de l'angle à cause du poids du moteur
- Et puis des optimisations diverses au niveau du code, et ajout de scotch (beaucoup)
Merci de votre attention ! La prochaine étape est donc la compétition mondiale de la Robocup aux Pays-Bas ! Le niveau est beaucoup plus élevé par contre donc ça promet d’être compliqué ^^’
Posté par
- 11 avril 2024 - 09:02
La semaine dernière avait lieu la compétition régionale d'Ile de France de la Robocup Junior à laquelle nous avons participé (https://www.ac-paris...p-junior-121792), qui réunissait d'autres équipes de robots des académies de Paris, Créteil et Versailles.



Après des matchs assez peu concluants pour les robots (il reste encore du travail pour fiabiliser tout ça, je pense à toi la roue qui tombe en plein match), on a quand même réussi à finir 5è et à se qualifier (de peu) pour la compétition nationale !!

Posté par
- 19 mars 2024 - 11:43
Bonjour
Grosse séance d'assemblage hier.

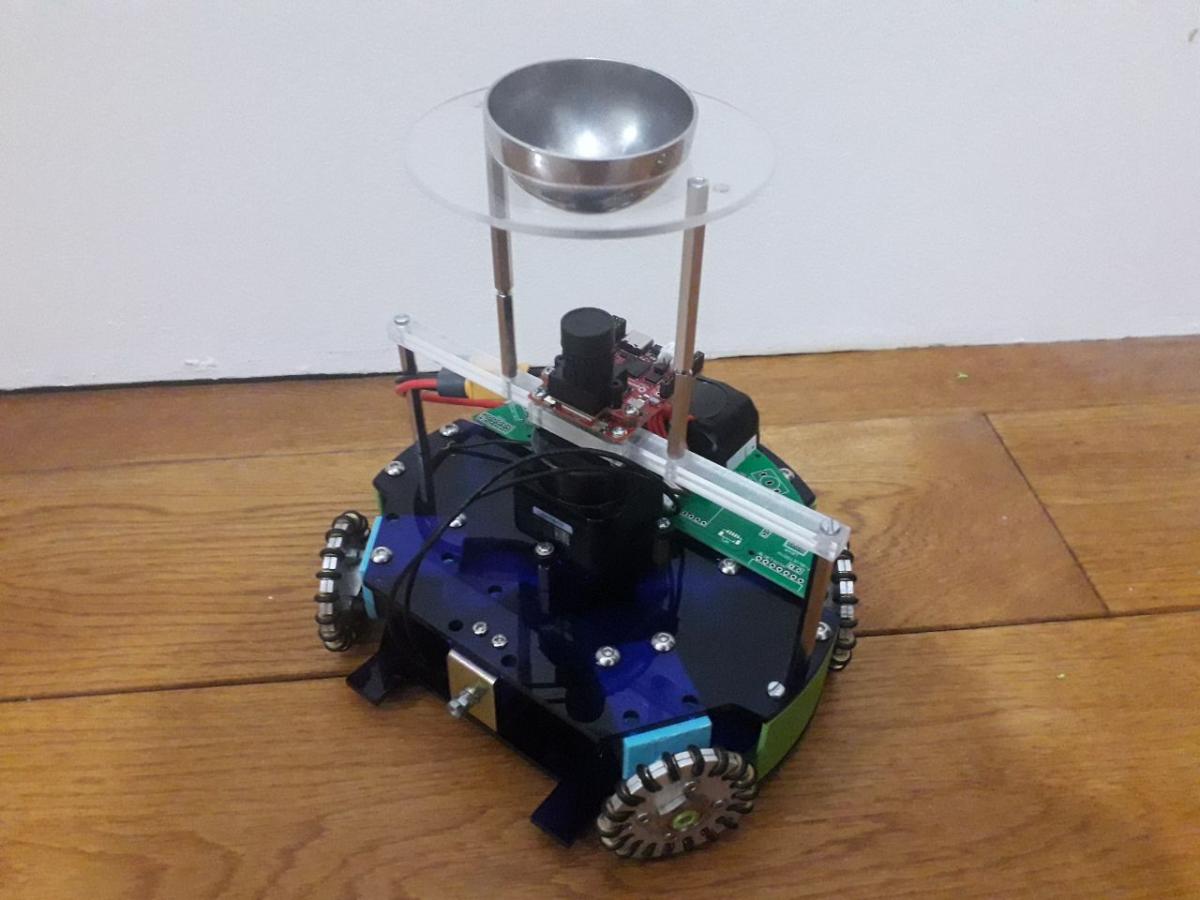
On a encore un peu décalé les moteurs sur le côté. Ils sont maintenant à 110 et 70° les uns des autres, ce qui permet d'être environ 15% plus rapide lors des déplacements vers l'avant comparé à une configuration normale. Le support de la caméra a également été élargi et réduit à 2 supports en métal pour diminuer les angles morts du lidar LD19 (placé au milieu). Pour le miroir on a pensé à utiliser un tube en plastique transparent pour le supporter et aussi éviter d'avoir des angles morts, mais la compétition régionale approche (c'est le 4 avril) donc on gardera surement ce miroir et ces supports temporaires qu'on renforcera un peu en attendant. La construction du châssis du deuxième robot n'a pas encore été terminée, mais c'est en cours.
On a également fait un peu de soudure en préparation pour les PCBs, dont on a d'ailleurs reçu les circuits imprimés (les composants arrivent bientôt).
Posté par
- 09 mars 2024 - 06:30
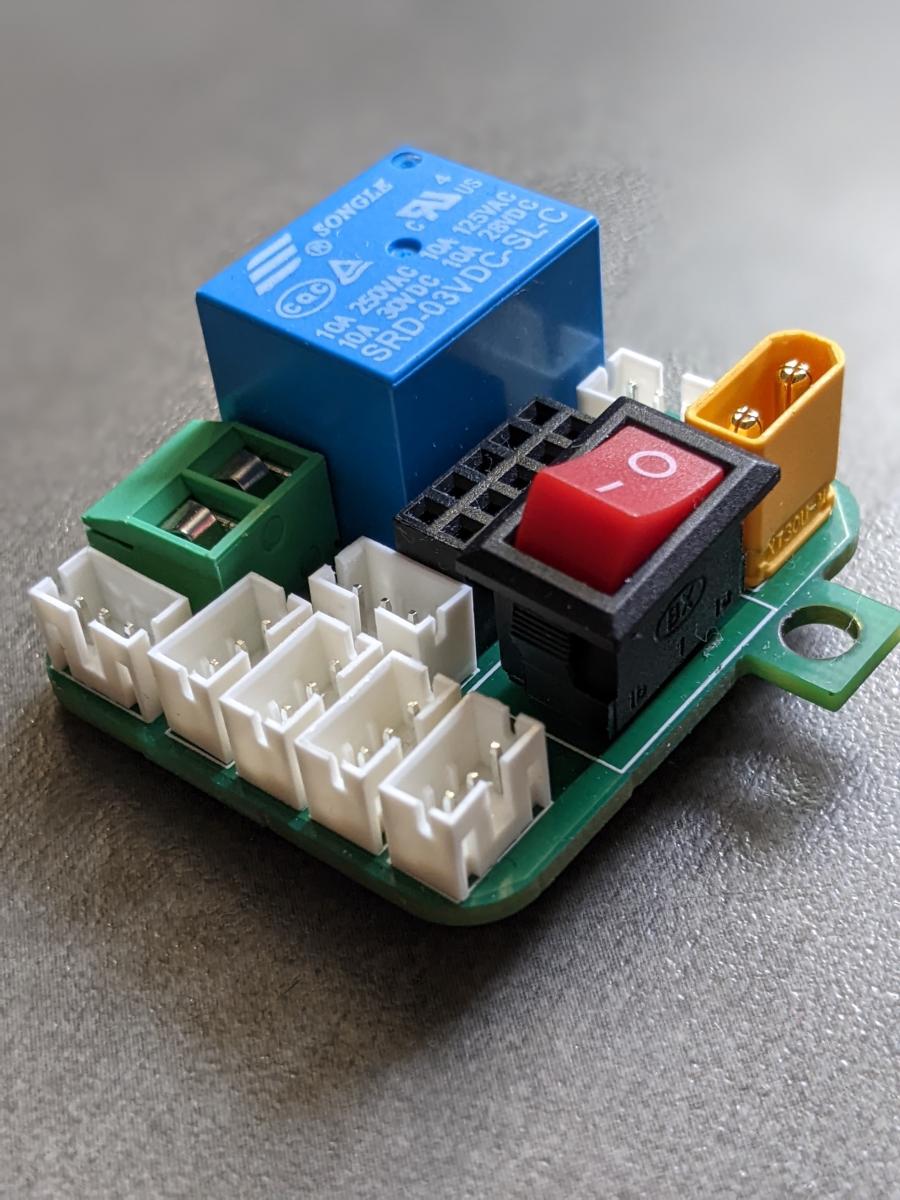
Merci pour les conseils. Voilà ce que ça donne avec un port XT30 (coudé car il n'y a pas assez de place verticalement) et des pistes plus larges en sortie de l'alim :
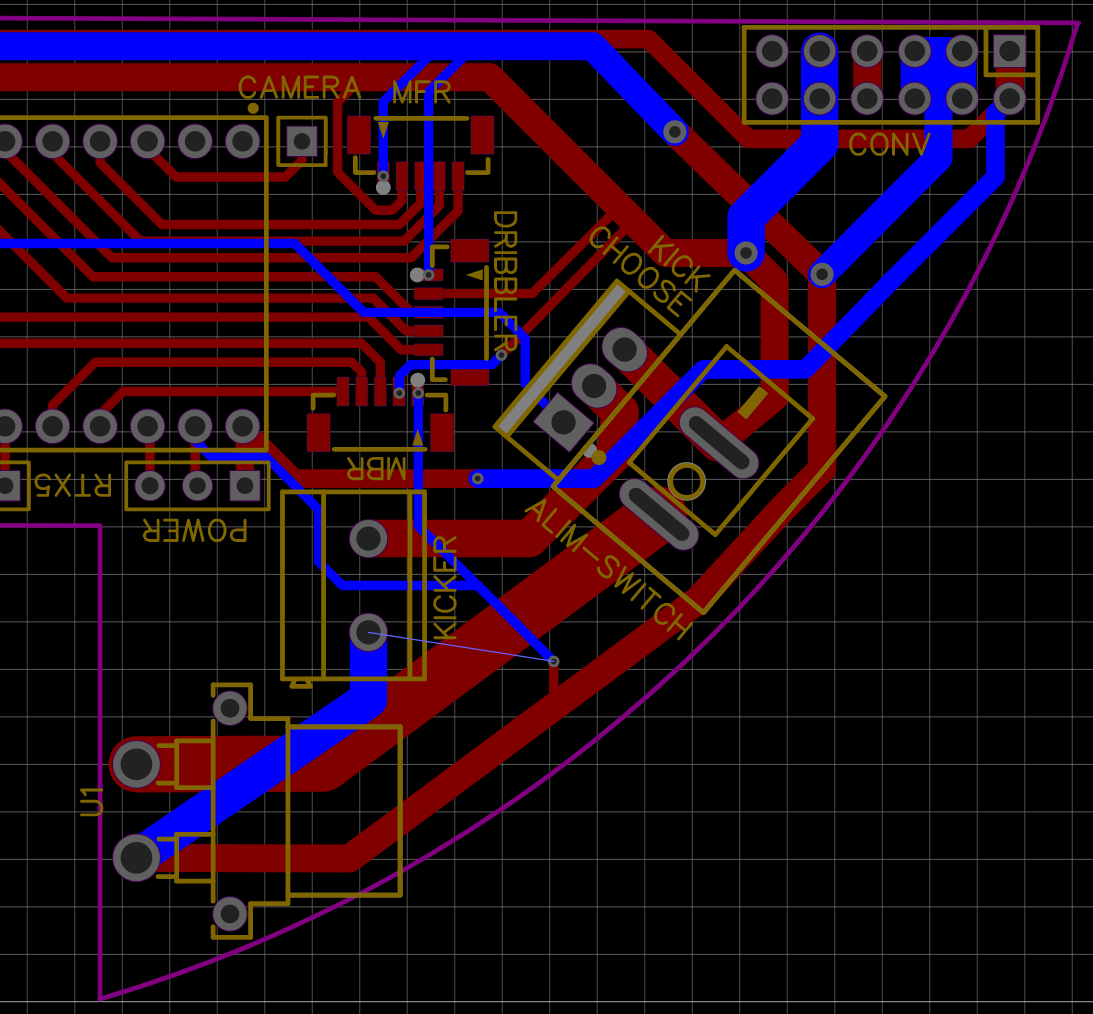
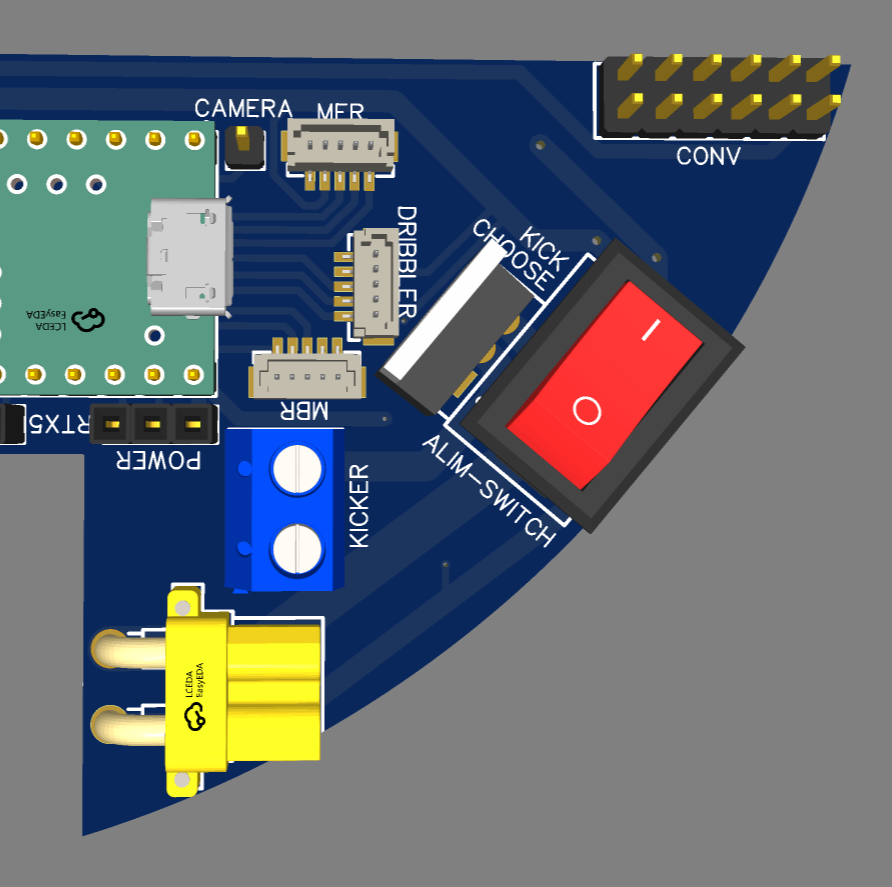
Ca permet de libérer de la place pour déplacer de ce côté de la carte les composants qui nécessitent beaucoup de courant, pour qu'ils aient leurs propres pistes élargies
Posté par
- 06 mars 2024 - 11:49
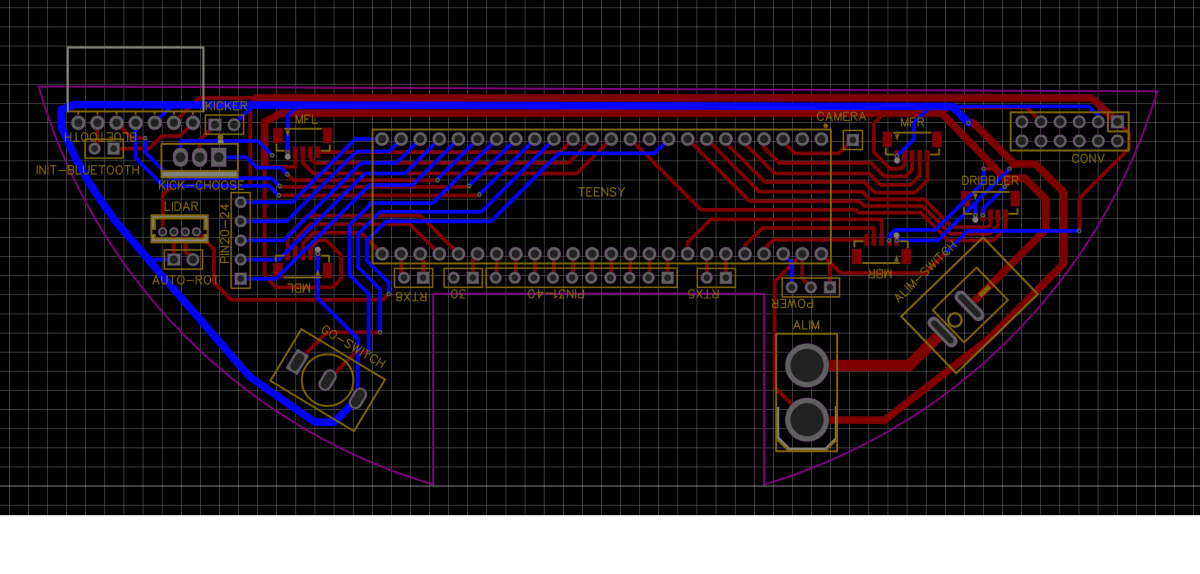
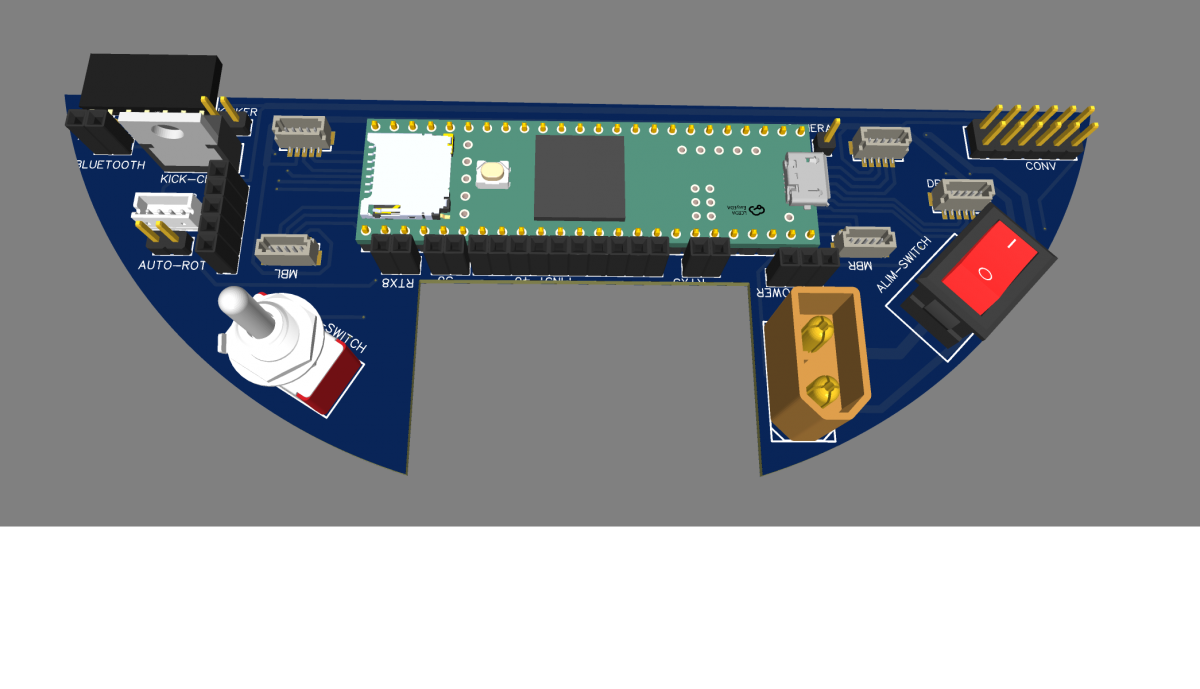
On a avancé sur la conception d'un PCB pour regrouper tous les composants électroniques et les ports du robot, est ce qu'il y aurait des changements à faire pour améliorer le routage ? Ou peut-être ajouter certains composants pour la sécurité ?
(La batterie est une lipo 6s pour alimenter les moteurs, et sinon il y a un convertisseur 5V pour le reste)
Posté par
- 15 février 2024 - 10:19
Ah? de mon côté ça fonctionne, peut-être que ça marchera mieux sur youtube
https://youtu.be/XEG...sbG6SntoDsUoht1
Posté par
- 14 février 2024 - 10:44
Quelques avancées depuis la dernière fois :
On a trouvé une solution temporaire pour le miroir, en utilisant une demi-sphère réfléchissante (trouvée dans le débarras ^^). La forme optimale étant à priori l'hyperbole, la caméra a un peu de mal à voir les objets de loin, mais ça devrait faire l'affaire pour l'instant.
On a un bon début d'algorithme de déplacement vers la balle, en utilisant la direction dans laquelle la balle a été détectée sur les images prises par la caméra, on peut en déduire avec un peu de trigonométrie la direction et la vitesse auxquelles les moteurs doivent tourner. Une vidéo d'un des tests qu'on a fait : https://twitter.com/...5901202578?s=20
L'objectif avec le LIDAR sera de déterminer les coordonnées du robot sur le terrain, et donc également celles de la balle en récupérant la distance à laquelle celle-ci se trouve (en convertissant les distances sur le miroir en distances réelles). Ca devrait permettre de pouvoir mettre en place certaines stratégies de jeu, comme par exemple foncer simplement sur la balle, ou essayer de la cacher en l'amenant vers le goal.
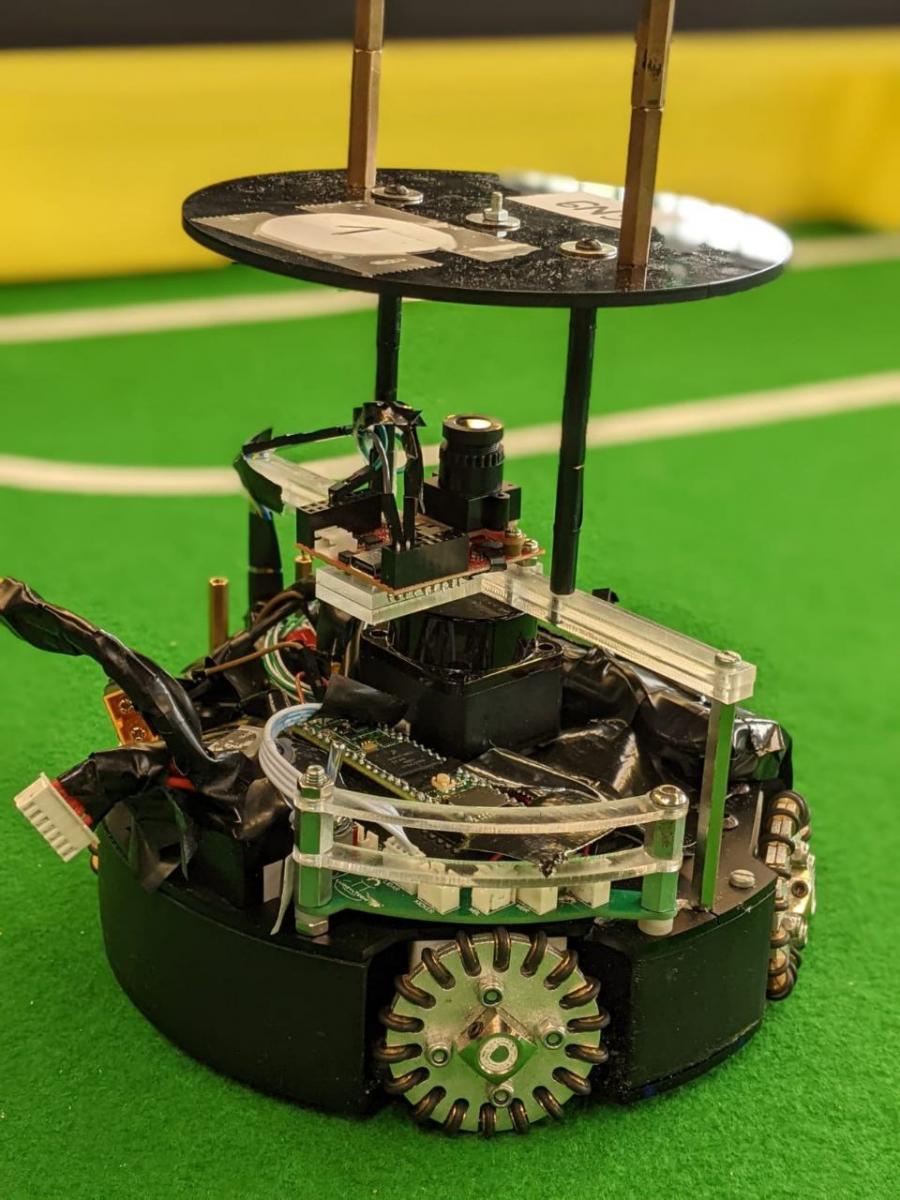
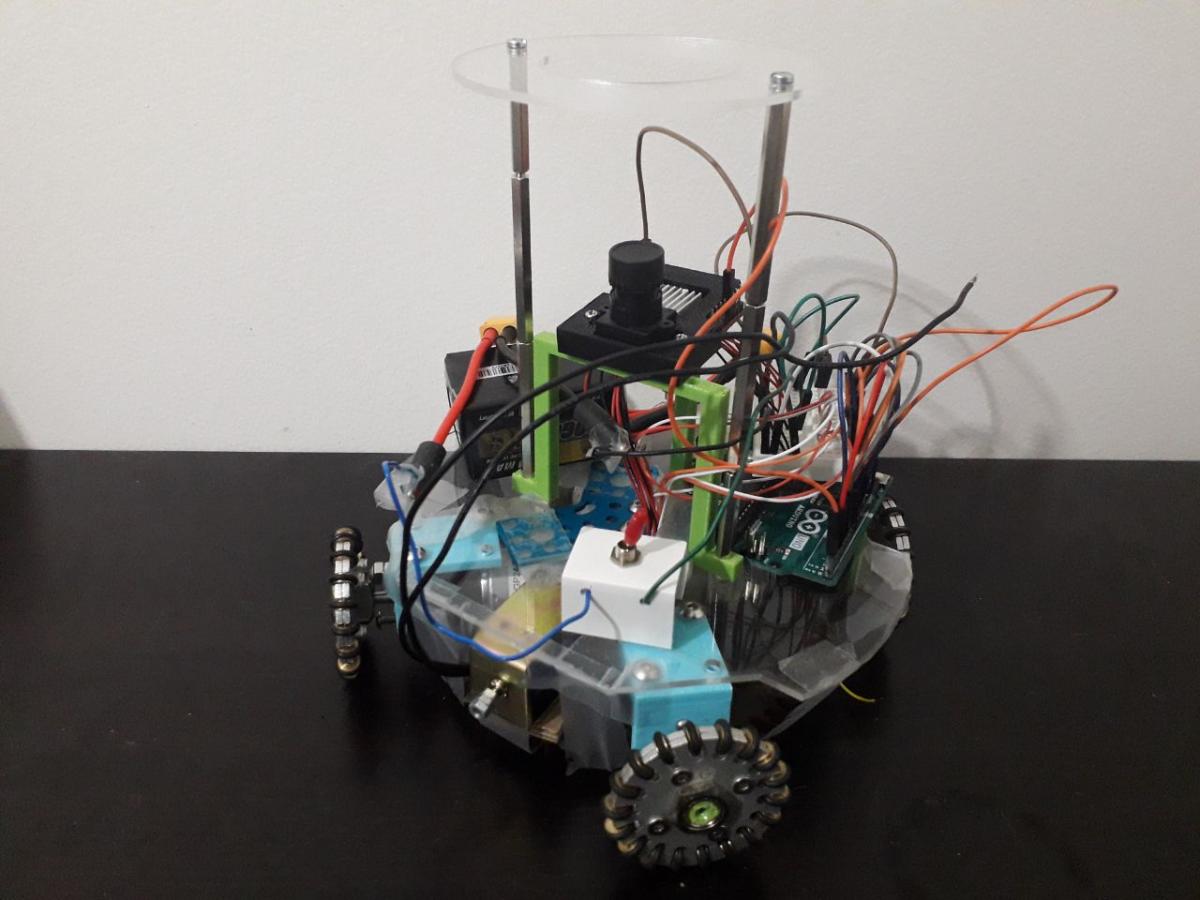
En tout cas en attendant on a un peu modifié le châssis :

C'est moins fait à l'improviste donc c'est maintenant bien plus solide et il y aura des protections rajoutées tout autour. Les moteurs ont aussi été légèrement décalés de 5° vers les côtés pour libérer de la place pour le solénoïde à l'avant et la batterie à l'arrière. On essaye de mettre le plus de pièces en bas pour abaisser le centre de masse.
Posté par
- 27 janvier 2024 - 07:06
Bonjour,
Nous sommes un club de robotique de lycéens et nous participons à la compétition RoboCup Junior dont le but est de concevoir et fabriquer deux robots autonomes (donc pas de télécommande !) capables de disputer un match de foot face à une autre équipe de robots adverse.
Nous en sommes actuellement au développement du premier prototype, sur lequel nous avons déjà pas mal avancé :
- Motorisation avec 4 moteurs brushless équipés de roues omniwheels pour se déplacer dans n'importe quelle direction
- Système de positionnement avec un LIDAR à 360° (pour l'instant juste l'interprétation des données sur le microcontrôleur)
- Détection de la balle et des goals avec un algorithme de détection de couleurs sur une caméra OpenMV
- Système de tir de la balle avec un solénoïde et un transistor pour l'activer au bon moment
Le robot fait presque une vingtaine de centimètres de diamètre (le max autorisé est 18cm), et le terrain 2x2.5m environ
Nos prochains objectifs sont la fabrication d'un miroir hyperbolique pour que la caméra ait une vision à 360°, un système de capture de la balle avec un rouleau qui implémente une rotation arrière à la balle pour la plaquer contre le robot (pas le droit de bloquer la balle pour la garder), un circuit imprimé pour éviter la forêt de câbles, et un algorithme de localisation du robot sur le terrain à partir des données du LIDAR
L'équipe LudovaTech




