Mon contenu
Mon contenu Non spécifié
Non spécifié
 Posté par
Posté par j'éclairci un peu la modélisation.
en faite on considère les jambes du robot ainsi :
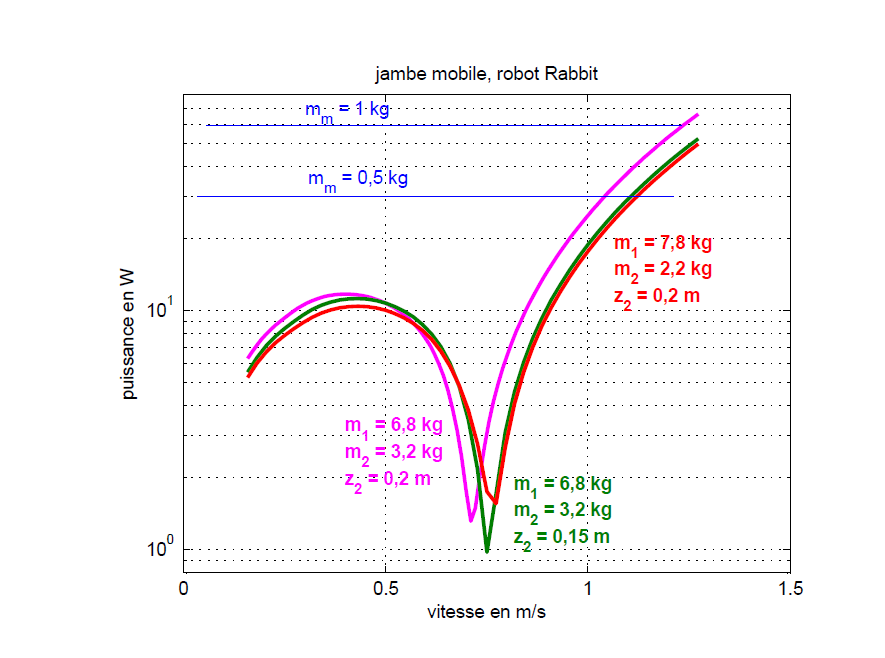
-une jambe a un mouvement de double pendule en balancement ( courbe énergétique associée : celle que j'ai déjà posté au début du topic).
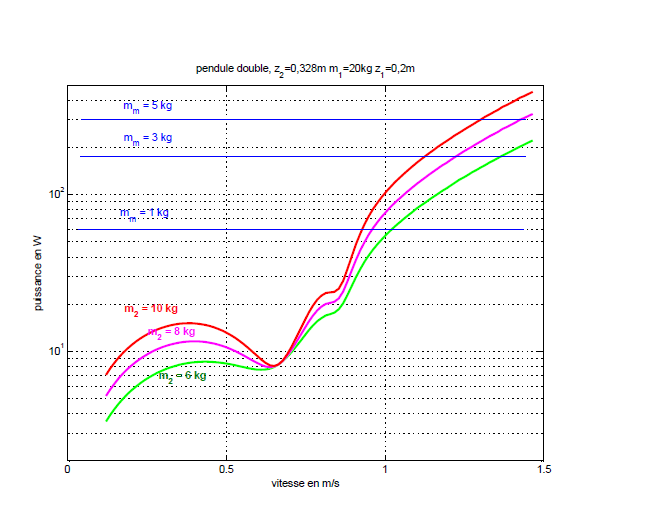
-la deuxième jambe en liaison ponctuelle (il n'y a pas de pied) avec le sol. cette jambe (appelé jambe fixe) a en faite un mouvement de pendule inverse. et bien sure cette jambe consomme de la puissance tout comme la jambe en balancement. je poste en pièce jointe la courbe de puissance consommée de cette jambe en fonction de la vitesse ( en faite je pense que cette vitesse peut être assimilé a la vitesse des hanches). puissance consomée au niveau d'un actionneur situé au niveau des hanches.
On remarque que la vitesse de plus basse consommation de la jambe fixe correspond a peu prés a la vitesse de plus basse consommation de la jambe en balancement...
Pensez vous que la raisonnace puisse expliquer les minimum sur cette courbe ?
En faite globalement, j'aimerai comprendre les facteurs qui permettent d'optimiser le consommation énergétique des jambes d'un robot bipéde...
Image(s) jointe(s)
- BET@.M@X aime ceci