

 Mon contenu
Mon contenu Homme
Homme
 Posté par
Posté par 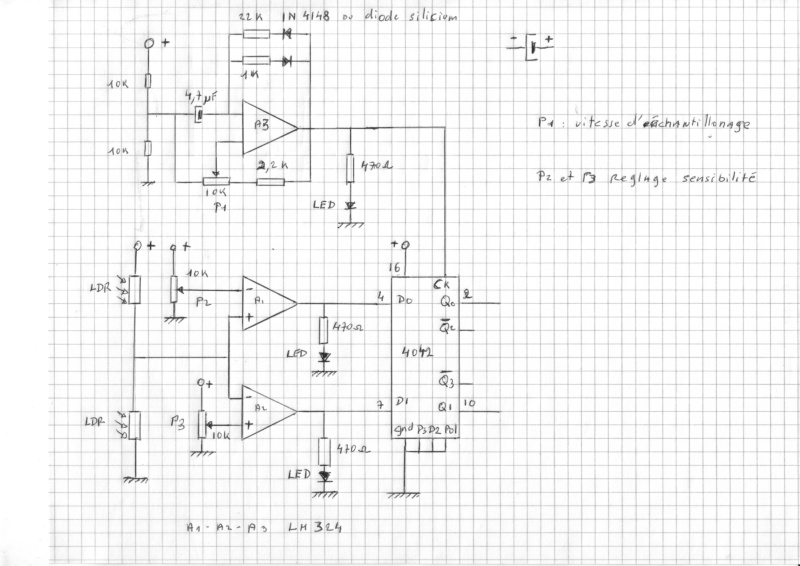
La réalisation pratique
J'ai un problème c'est que je câble en suivant mon idée donc il y a déjà monté une partie du traitement des impacts
Le réglage de la partie lumière. mettre les cellules sous une lampe, régler les potars P2 et P3 pour que les diodes soient éteintes.
attention : la dispersion des caractéristiques des LDR est telle que l'on peut avoir sur le point milieu du pont diviseur 1,5 Volt.
Passer un doigt devant une des cellules, la led s'allume, puis essayer l'autre. L'affinage se fait après sur la ligne
Le potar P1 sert à régler la vitesse d'échantillonnage, la led est allumée est s'éteint pendant un temps très court.
La bascule 4042 sert à mettre en mémoire l'ordre, cela rend le robot moins erratique.
les réglages sont a fignoler lors des essais.
Pour une utilisation avec un circuit telle que le L298 on utilise des quatre sorties de la bascule
Important les entrée D2 et D 3 doivent etre à la masse (o volt)
le circuit est alimenté en 6 Volts
- Mike118 aime ceci




