

 Mon contenu
Mon contenu Non spécifié
Non spécifié





Petit precision parce que c est pas tres clair dans mes screen shoot :
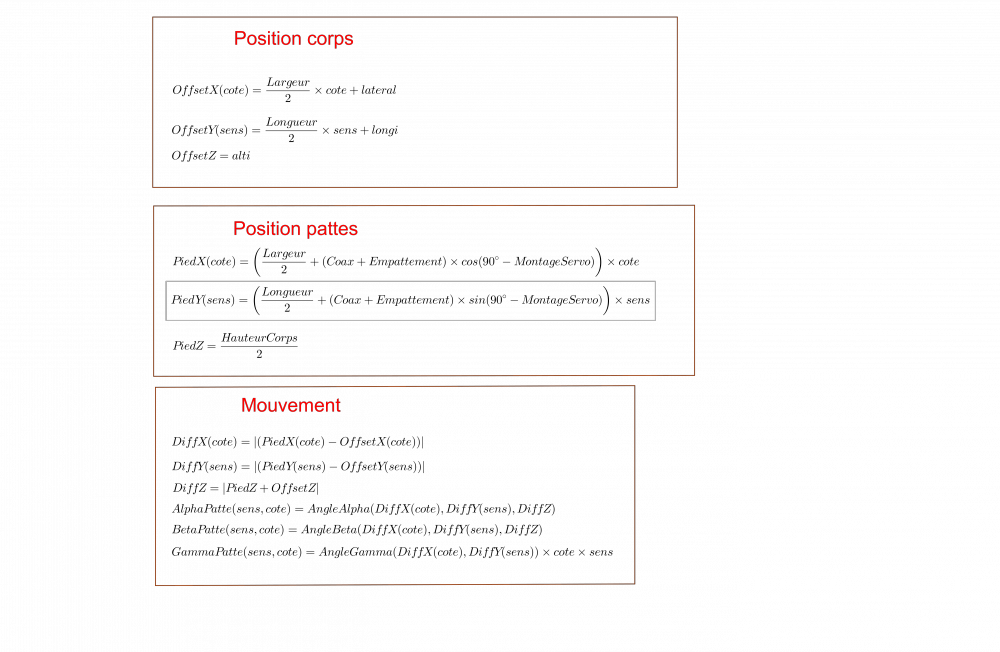
DiffX et DiffY sont des valeurs absolu
- Oliver17 aime ceci
 Posté par
- 04 août 2016 - 04:23
Posté par
- 04 août 2016 - 04:23
Petit precision parce que c est pas tres clair dans mes screen shoot :
DiffX et DiffY sont des valeurs absolu
Posté par
- 04 août 2016 - 04:15
hello
Désole d avoir était aussi long j ai pas eu trop le temps mais j ai fait ça pour ton robot
alors pour commencer comme je savais pas comment est monté ton robot je suis partis sur cette base

tu pourras corriger si ton robot est monté différemment
pour la cinématique elle est sur géogébra parce que je l'ai testé virtuellement avant de te la proposer

désolé c'est un peu petit, mais tu peux agrandir en ouvrant le lien dans une nouvelle fenêtre(je sais pas comment le mettre en plus grand)
Avec ça tu as une base qui fonctionne
Si, comme moi, tu veux rajouter le roulis,tangage,lacet ou autre mouvement de corps c est dans position corps que ça se passe.
L amplitude des pas de chaque patte ou position "d'attitude" par exemple c'est dans position pattes qu il faut le définir.
Le style de marche vecteur de marche et direction c est dans Mouvement
si tu rajoute des éléments a ton robot(un bras articulé par exemple) il faudra modifié la cinématique inversé pour qu elle le prenne en compte
et tu distribue tout ca avec une boucle
la définition est simple:
servo1 = GammaPatte(avant,droite)
servo2 = AlphaPatte(avant,droite)
servo3 = BetaPatte(avant,droite)
servo4 = GammaPatte(avant,gauche)
ect......
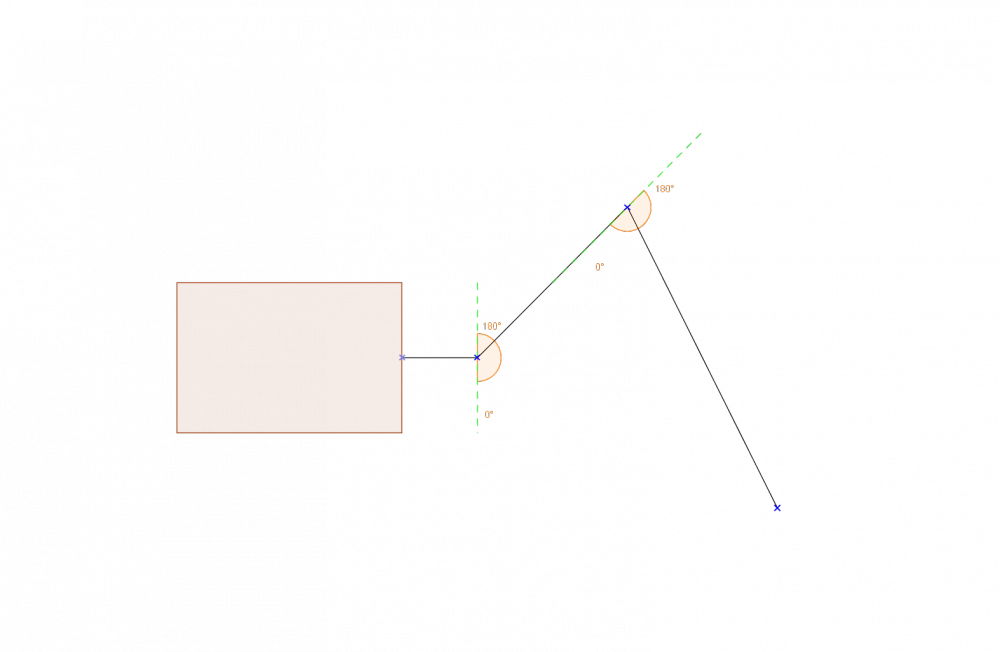
Un lien avec la cinématique fonctionnel, il te suffit de bouger les curseurs vert en haut de la page.Je n'ai pas résolu le déplacement visuel de la diagonal pour que tu vois bien que le pied n'est pas un point fixe sur la page mais que c est bien la cinématique qui gère les angles
https://www.geogebra.org/m/nU9jakAj
Voila 
Posté par
- 11 juillet 2015 - 01:48
Ce que je connais :
les variables constante
hauteur thorax : thha=2
largeur thorax: thla=4
longueur thorax: thlo=6
coax : coax=1
femur : femur=3
tibia : tibia=5
les variables
hauteur "d'origine" pour mon exemple je la définirais à 3 par défaut mais qui sera variable selon la posture choisi,
plus toute les commandes radio.
schéma dynamique:
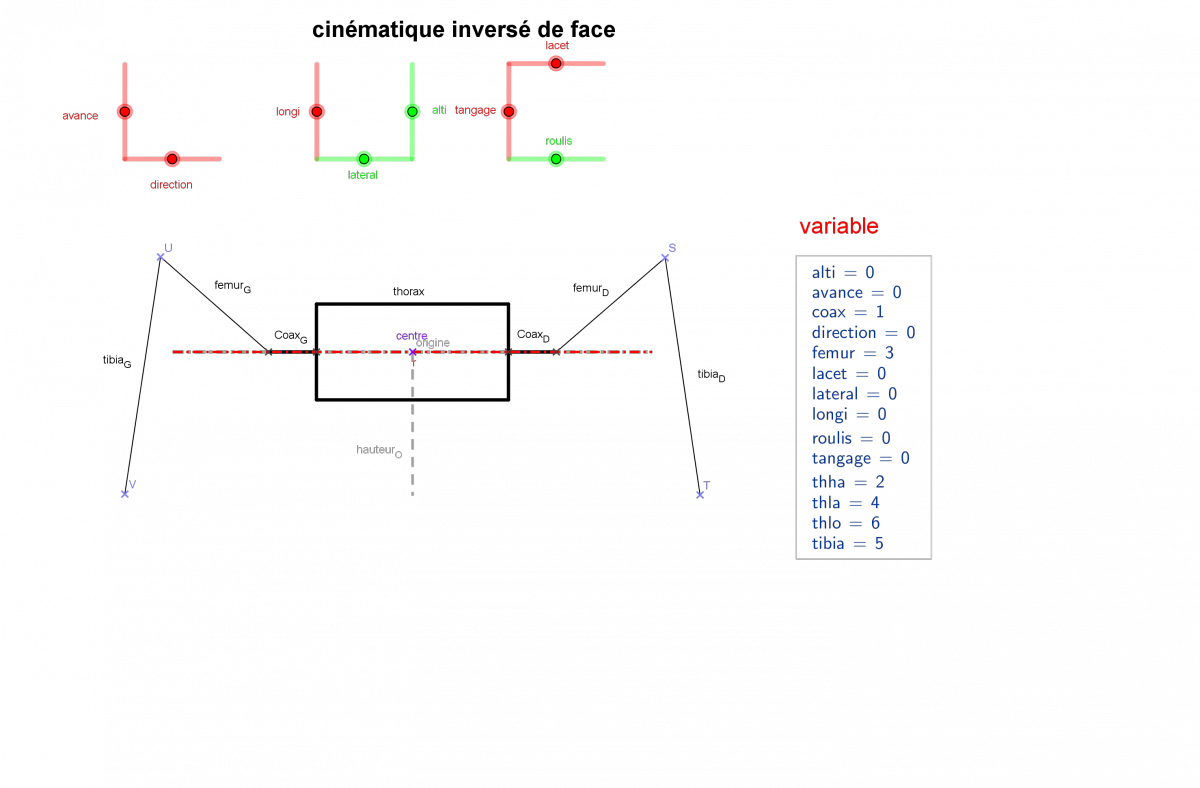
Pour un meilleur compréhension je ne vais traiter que des pattes centrale droite et gauche vue de face et je ne prendrais pas en compte non plus les modification induite par les mouvement des autres axes pour l instant.Mais tout les principes de calcule sont deja dans cette premiere vue.




