
 Mon contenu
Mon contenu Not Telling
Not Telling






Bonjour,
Pour les 10 ans de mon entreprise, je lance un concours pour gagner une carte Raspberry Pi 5 ou une Pico 2W !
Voici le lien pour participer au concours : https://fr.macerobotics.com/concours/
[attachment=16137:affiche.png]
Bonne journée,

16 octobre 2025 - 10:39
Bonjour,
Je vous présente une mise à jour 2025 du robot MRPi1, le robot MR-25 basé sur une carte Raspberry Pi 5 :
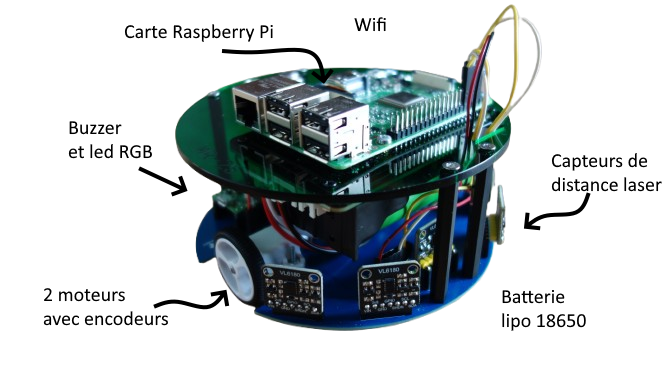
Le robot est Open source sur Github, j'ai encore quelques améliorations à faire sur le firmware et la documentation.
Ce robot prêt à l'emploi s'adresse surtout pour les écoles d'ingénieurs, IUT, BTS et universités.
Je le fabrique de façon artisanale en Bretagne en fonction de la demande.
Des vidéos du robot seront bientôt en ligne.
Nicolas




