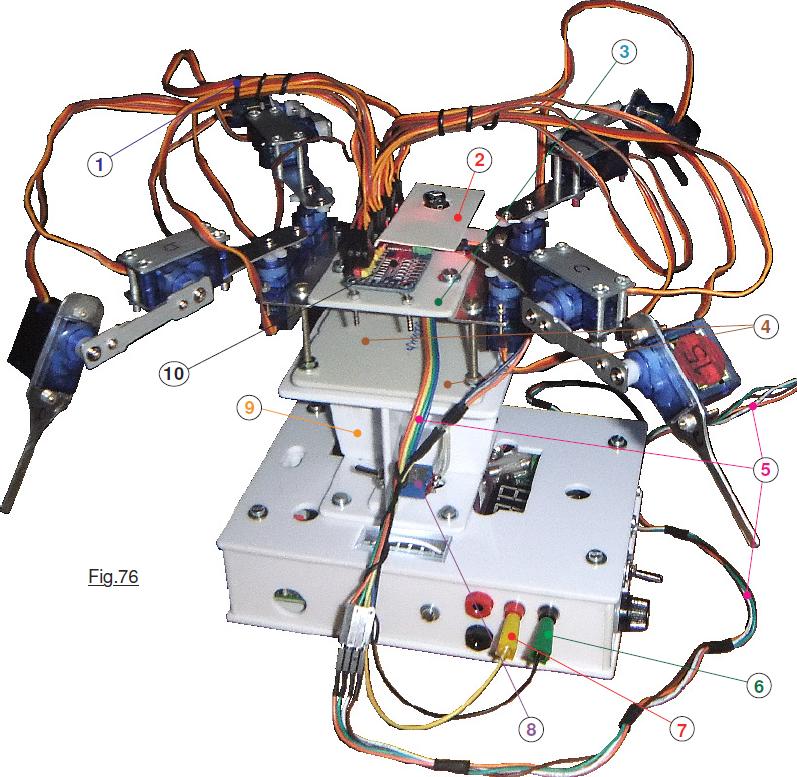
 Pénétrer dans ce sanctuaire n’est pas immédiat. On commence par entrer dans un vestiaire où l’on quitte ses vêtements. Puis on enfile une combinaison désinfectée du genre turbulette pour les nourrissons. On ajoute une combinaison étanche qui nous fait ressembler à un astronaute. Cette dernière est équipée dans le dos d’un petit système de conditionnement respiratoire, car il n’est pas question d’amener dans cette pièce sacrée le plus petit microbe. En fait, on réalise une EVA … mais dans la maison ! Équipé de ce scaphandre très souple et singulier, on s’enferme dans un premier sas pour se voir décontaminer. Puis un deuxième sas nous oblige à une toilette intégrale. Ce n’est qu’après avoir été séchés et suite à tous ces préparatifs qui demandent pratiquement une heure, que l’on peut enfin aller toucher du doigt le Saint Graal. Sur des charbons ardents, j’emboîte le pas à Mercier qui se charge d’ouvrir l’écoutille et c’est avec une émotion intense qu’on peut l’approcher. Machine imposante par sa taille, elle nous domine en Fig.76 de sa splendeur, placée sur le berceau 9 qui le moment venu sera intégré sur Ariane. Tout en haut en 10 se trouve le multiplexeur dont la LED rouge éblouis trop intensément, raison pour laquelle un cache 2 masque son rayonnement. Les nombreux conducteurs électriques ne sont pas encore « coiffés », car l’électronique définitive n’est toujours pas entièrement connue. Ils sont reliés grossièrement en torons en 1 pour donner un semblant d’ordre. En 3 on retrouve la plaque qui supporte 10 et qui est immobilisée sur le châssis. En 4 bien repérable se trouve le bouclier. La sonde est uniquement posée sur le berceau 9, on peut la déplacer à convenance. Le cordon ombilical 5 est branché sur le petit connecteur HE14 du multiplexeur 10 et se sauve à travers des « passes murs » étanches vers l’ordinateur de bord toujours préservé en salle informatique S4. En 6 et 7 on repère les fils électriques de section raisonnable issus de la centrale électrique et qui amènent la puissance sur le module 10. Enfin en 8 un inverseur permet de couper ou de valider l’ampèremètre, car maintenant que le berceau est immobilisé sur le couvercle de la centrale électrique, le mini « strap à languette » n’est plus facile à insérer ou enlever de son support.
Pénétrer dans ce sanctuaire n’est pas immédiat. On commence par entrer dans un vestiaire où l’on quitte ses vêtements. Puis on enfile une combinaison désinfectée du genre turbulette pour les nourrissons. On ajoute une combinaison étanche qui nous fait ressembler à un astronaute. Cette dernière est équipée dans le dos d’un petit système de conditionnement respiratoire, car il n’est pas question d’amener dans cette pièce sacrée le plus petit microbe. En fait, on réalise une EVA … mais dans la maison ! Équipé de ce scaphandre très souple et singulier, on s’enferme dans un premier sas pour se voir décontaminer. Puis un deuxième sas nous oblige à une toilette intégrale. Ce n’est qu’après avoir été séchés et suite à tous ces préparatifs qui demandent pratiquement une heure, que l’on peut enfin aller toucher du doigt le Saint Graal. Sur des charbons ardents, j’emboîte le pas à Mercier qui se charge d’ouvrir l’écoutille et c’est avec une émotion intense qu’on peut l’approcher. Machine imposante par sa taille, elle nous domine en Fig.76 de sa splendeur, placée sur le berceau 9 qui le moment venu sera intégré sur Ariane. Tout en haut en 10 se trouve le multiplexeur dont la LED rouge éblouis trop intensément, raison pour laquelle un cache 2 masque son rayonnement. Les nombreux conducteurs électriques ne sont pas encore « coiffés », car l’électronique définitive n’est toujours pas entièrement connue. Ils sont reliés grossièrement en torons en 1 pour donner un semblant d’ordre. En 3 on retrouve la plaque qui supporte 10 et qui est immobilisée sur le châssis. En 4 bien repérable se trouve le bouclier. La sonde est uniquement posée sur le berceau 9, on peut la déplacer à convenance. Le cordon ombilical 5 est branché sur le petit connecteur HE14 du multiplexeur 10 et se sauve à travers des « passes murs » étanches vers l’ordinateur de bord toujours préservé en salle informatique S4. En 6 et 7 on repère les fils électriques de section raisonnable issus de la centrale électrique et qui amènent la puissance sur le module 10. Enfin en 8 un inverseur permet de couper ou de valider l’ampèremètre, car maintenant que le berceau est immobilisé sur le couvercle de la centrale électrique, le mini « strap à languette » n’est plus facile à insérer ou enlever de son support.
Élaboration du berceau.
Manifestement conçu pour recevoir le petit quadrupède sur le tablier 2 dont les trous de passage des vis 1 correspondent à celles du bouclier, ce dispositif constitue un support « universel » qui complète l’arsenal dédié à la programmation sur Arduino. Il pourra à convenance se voir déposer du couvercle de l’alimentation de puissance pour en faire un support indépendant. Un tel dispositif est très pratique quand sur le bureau très encombré de l’ordinateur doit cohabiter un petit matériel robotique en 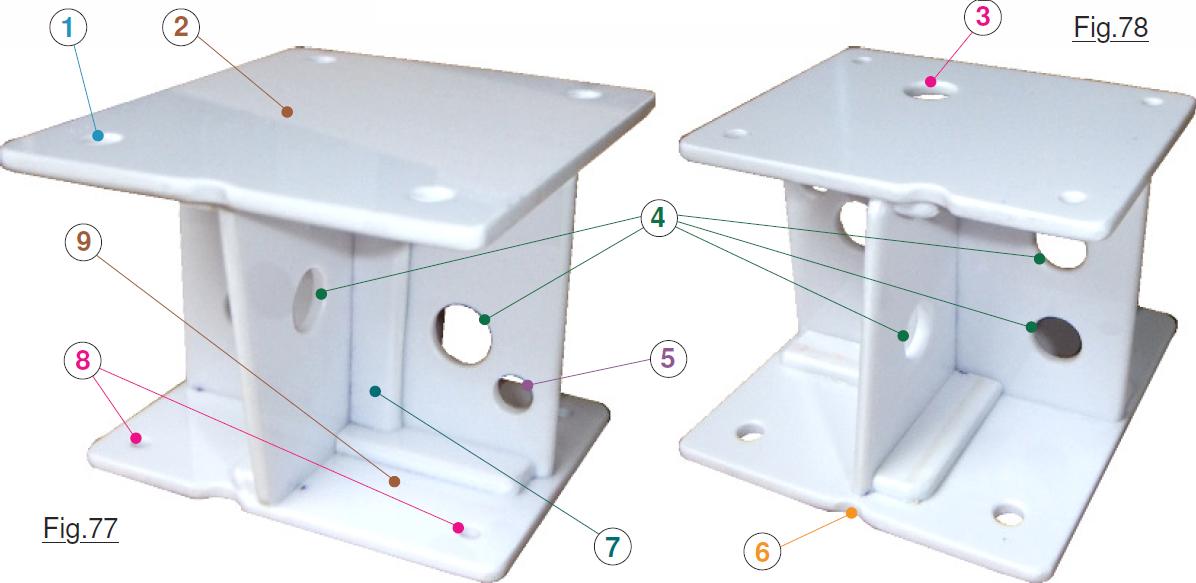 cours de programmation. En fonction des besoins il sera possible de le retourner comme sur la Fig.78 pour avoir la surface 2 la plus grande vers le bas servant alors de semelle. Les deux photographies Fig.77 et Fig.78 ne le montrent pas forcément, mais la semelle 8 est bien plus petite en surface que la plaque 1 du dessus sur laquelle se pose la sonde. Il ne fallait pas masquer les orifices du couvercle de l’alimentation ce qui imposait des dimensions maximales à 8. Le tablier 2 devait recevoir le bouclier, donc les positions des trous 1 sont imposées. Retourné sens dessus dessous sur la Fig.78, on voit bien en 3 le trou qui se trouve en vis à vis de celui du mini « strap à languette ». Devenu pratiquement inaccessible, le connecteur est maintenant relié à l’inverseur qui se fixe dans le trou 5. (Inverseur 8 sur la Fig.76.) Comme c’est le cas sur le bouclier de JEKERT deux encoches 6 repèrent « l’avant de la sonde » pour éviter toute hésitation au moment de la replacer sur le berceau. En 7 on retrouve les consolidations d’angles entre chaque dièdre, renforcements inhérents à mes techniques de fabrication. (Du solide …) Et surtout en 4 sur toutes les faces des plaques verticales, des trous de grand diamètre qui « ne servent à rien ». L’expérience m’a montré que de tels orifices sont bien commodes parfois pour faire transiter des lignes électriques quelconques et les guider pour ne pas qu’elles encombrent trop sur le bureau et exactement au mauvais endroit …
cours de programmation. En fonction des besoins il sera possible de le retourner comme sur la Fig.78 pour avoir la surface 2 la plus grande vers le bas servant alors de semelle. Les deux photographies Fig.77 et Fig.78 ne le montrent pas forcément, mais la semelle 8 est bien plus petite en surface que la plaque 1 du dessus sur laquelle se pose la sonde. Il ne fallait pas masquer les orifices du couvercle de l’alimentation ce qui imposait des dimensions maximales à 8. Le tablier 2 devait recevoir le bouclier, donc les positions des trous 1 sont imposées. Retourné sens dessus dessous sur la Fig.78, on voit bien en 3 le trou qui se trouve en vis à vis de celui du mini « strap à languette ». Devenu pratiquement inaccessible, le connecteur est maintenant relié à l’inverseur qui se fixe dans le trou 5. (Inverseur 8 sur la Fig.76.) Comme c’est le cas sur le bouclier de JEKERT deux encoches 6 repèrent « l’avant de la sonde » pour éviter toute hésitation au moment de la replacer sur le berceau. En 7 on retrouve les consolidations d’angles entre chaque dièdre, renforcements inhérents à mes techniques de fabrication. (Du solide …) Et surtout en 4 sur toutes les faces des plaques verticales, des trous de grand diamètre qui « ne servent à rien ». L’expérience m’a montré que de tels orifices sont bien commodes parfois pour faire transiter des lignes électriques quelconques et les guider pour ne pas qu’elles encombrent trop sur le bureau et exactement au mauvais endroit …
Redéfinir les limites des mouvements individuels.
Encore ! Mais ça a déjà été fait deux fois avec les tableaux et tout et tout ! Et oui les amis, en développement d’un projet nous devons constamment remettre l’ouvrage sur le métier. Souvent le contexte change, il faut actualiser les données. Dans notre cas, les servomoteurs ne sont plus isolés. Ils déplacent des organes encombrants dans une promiscuité environnementale. Par exemple les Jambes peuvent venir en butée avec le tablier. Une restriction angulaire peut minimiser ce risque. Donc pour chaque moteur il conviendra d’établir des limites qui cette fois devraient ne plus évoluer car globalement les volumes matériels sont définis et certainement ne changeront plus de façon significative. Pour pouvoir programmer aisément, ce n’est plus un tableau que l’on va élaborer, mais compléter la fiche nommée Repérage et caractéristiques des articulations qui sera constamment à proximité du clavier. Je n’y ai pas porté les valeurs relatives à la motorisation du prototype pour que vous puissiez y consigner les vôtres conformément aux caractéristiques de vos moteurs. Téléversez le démonstrateur P05_Piloter_au_potentiometre.ino dont la fiche Pilotage individuel des moteurs avec le potentiomètre fournit les protocoles d’exploitation. ATTENTION : Ne remplir la colonne Sortie qu’au crayon car un changement de stratégie hante les environs. Respectez les consignes de branchement précisées dans le programme. Puis, moteur par moteur testez physiquement les débattements raisonnables et en déduire les butées logicielles qui seront consignées dans la fiche spécifique ci-dessus mentionnée. Nous serons alors en mesure de débuter les études logicielles.
Suite logique aux premiers essais de motorisation.
Piloter les moteurs avec le potentiomètre n’est pas significatif des méthodes d’exploitation de la sonde qui seront appliquées lorsqu’elle devra explorer les contrées poussiéreuse de la mystérieuse planète rouge. Naturellement, la télécommande à l’aide du clavier s’impose. Il suffit de reprendre le programme qui assurait les échanges Homme / Machine par l’entremise de la ligne série USB du Moniteur de l’IDE. Vous téléversez P06_Pilotage_serie_des_moteurs.ino dans l’ATmega328, vous récupérez la fiche Protocoles de dialogues avec la sonde et envoyez vos consignes pour vérifier la cohérence de comportement de JEKERT. C’est exactement le programme identique à P04 pour lequel on a simplement réaffecté les sorties conformément à la Fig.63 et redistribué les valeurs des butées en fonction de la répartition des divers moteurs. On retrouve exactement les réactions de la sonde et les affichages sur l’écran de l’ordinateur. Les préambules matériels et logiciels sont en place, nous allons pouvoir commencer « les choses sérieuses ». Tout va bien dans le meilleur des mondes, la vie astronaurotique est belle …
La suite est ici.


