Revenir dans la salle informatique S4 n’est pas fait pour nous dĂ©plaire. DĂ©velopper les programmes d’exploitation est assez excitant, car sur le grand mur frontal un vidĂ©o projecteur Ă©claire tout l’Ă©cran des images fournies par quatre camĂ©ras Ă haute rĂ©solution qui entourent l’exploratrice confortablement installĂ©e sur son berceau. Chaque consigne de mouvement peut s’observer de tous les cotĂ©s de l’insecte quadrupĂšde. CotĂ© planning nous sommes un peu en avance, constat de bonne augure. Nous dirigeant vers l’ordinateur qui nous est rĂ©servĂ©, Crouzet, l’un des ingĂ©nieurs logiciels vient Ă notre rencontre.
– Jour GC, (Les personnels s’amusent Ă nous nommer Grand Chef, il s’agit d’un surnom bon-enfant.)
– Ya un prob avec la rĂ©partition des moteurs.
– Ha oui, lequel Julien ? (Nous avons Ă cĆur dâappeler les personnels par leurs prĂ©noms respectifs pour instaurer des relations amicales.)
– Ben c’est bien beau de les avoirs regroupĂ©s par connecteurs, mais ça bouffe 116 octets.
– Tant que ça ? Mazette, t’as raison Julien, faut immĂ©diatement revoir notre copie.
MACHINE ARRIĂRE TOUTE !
Maitre mot en dĂ©veloppement d’un projet qui Ă©voluera probablement vers la saturation de l’espace mĂ©moire rĂ©servĂ© au programme : OPTIMISER EN PERMANENCE LE CODE. Le projet ludique en gestation est « ambitieux » et ouvre la porte Ă une foule de possibilitĂ©s. Hors la mĂ©moire rĂ©servĂ©e au programme est limitĂ©e. Il n’y a que deux voies pour pouvoir « tasser » le maximum de comportements opĂ©rationnels dans le programme qui animera l’insecte :
âą Utiliser toutes les ressources de l’ATmega328.
⹠Minimiser en permanence la taille du code objet généré par le compilateur.
STRATĂGIE DE PROGRAMMATION :
Nous allons Ă©crire des sĂ©quences qui seront chargĂ©es de rĂ©aliser une action ciblĂ©e. Quand les routines qui se chargent d’une fonction seront au point, avant de les considĂ©rer comme « dĂ©finitives », il faudra systĂ©matiquement faire un bilan de leur coĂ»t en termes de nombre d’octets qu’elles mobilisent en octets dans la zone programme et dans celle des donnĂ©es dynamiques. Puis, analysant finement le code source Ă©crit en C++ voir si des Ă©conomies sont possibles.
Quand je vous livrerai un programme, globalement cette approche sera respectĂ©e sans le prĂ©ciser, c’est Ă dire que je fournirai les dĂ©monstrateurs sans autre forme de procĂšs. Ce n’est que ponctuellement que l’on abordera la phase optimisation. Notez que cette optique devrait guider tous les programmeurs et … en permanence quand Ă©moustillĂ©s par leurs envies ils titilleront le clavier de l’ordinateur.
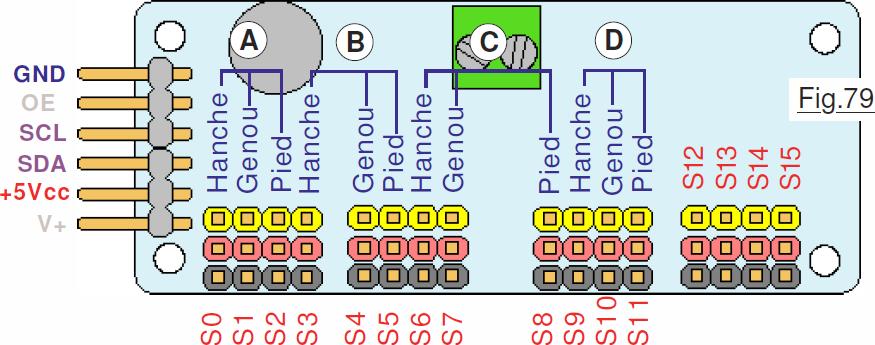
Lorsque l’on compare les deux programmes P04 et P06 on constate que P06 consomme effectivement 116 octets de programmes de plus que P04. Pourtant il ne gĂšre que douze moteurs au lieu de seize. Le seul bĂ©nĂ©fice que l’on tire de cette Ă©volution c’est la facilitĂ© Ă brancher les servomoteurs. Encore que les connecter en ligne n’est pas vraiment dĂ©licat. RepĂ©rer facilement un membre Ă©tait aussi annoncĂ© comme avantageux. Ce n’est pas faux. Cependant, maintenant que l’on a vĂ©rifiĂ© le matĂ©riel, nous allons oublier somptueusement les n° de sorties, les rĂ©fĂ©rences de traçabilitĂ© etc. Seuls les n° des moteurs indiquĂ©s sur la fiche RepĂ©rage et caractĂ©ristiques des articulations seront utiles en programmation. AprĂšs rĂ©flexion, le rapport QualitĂ© / Prix n’y est pas. Avec 116 octets il sera possible d’ajouter une ou deux fonctions de plus dans l’ordinateur de bord. Alors … on dĂ©branche, on rebranche, on revient en arriĂšre avec reprise de P04_Piloter_un_moteur.ino raison pour laquelle c’est ce dernier qui est mentionnĂ© dans Protocoles de dialogues avec la sonde.
Stratégie de développement.
Globalement, nous allons procĂ©der par « paquets ». C’est Ă dire que l’on va Ă©crire toutes les subroutines et fonctions qui permettront de faire fonctionner un programme d’exploitation. Quand ces derniĂšres seront optimisĂ©es, nous les « transporterons » dans un programme COMPLET qui cumulera toutes les avancĂ©es au fur et Ă mesure que des fonctionnalitĂ©s opĂ©rationnelles auront Ă©tĂ© mises au point. Comme le nombre de dĂ©monstrateurs est encore inconnu, pour ne pas avoir Ă le renommer en permanence le logiciel « dĂ©finitif » sera identifiĂ© par P30_Programme COMPLET.ino et sera le reflet de ce que peut faire JEKERT actuellement, comportant l’ensemble des fonctionnalitĂ©s mises au point. On se doute que ce programme va subir des chamboulements sĂ©vĂšres si l’optimisation remet en cause les Ă©critures prĂ©cĂ©dentes. Peu importe. Le principal, c’est d’avoir une rĂ©fĂ©rence qui tient Ă jour l’intĂ©gralitĂ© des amĂ©liorations apportĂ©es, car Ă la fin, regrouper tous les morceaux provoquerait un effet « boule de neige » dĂ©vastateur. De plus, comme le programme est complet, Ă tout moment nous connaĂźtrons sa taille et n’ajouter de nouvelles fonctions que si le matĂ©riel le permet. Rien ne serait plus frustrant que de ne pas pouvoir tout faire entrer dans la mĂ©moire …
Les premiĂšres briques de l’Ă©difice.
Engendrer des dĂ©placements d’un dispositif artificiel sur pattes en copiant la nature constitue l’une des approches les plus compliquĂ©es pour motoriser un engin mobile. Le roulage est de loin la solution la plus simple techniquement, que ce soit avec deux roues directionnelles, ou par des rotations synchrone ou opposĂ©es comme sur les engins munis de chenilles. DĂ©placer consiste Ă enchaĂźner des mouvements Ă©lĂ©mentaires. Aussi, avant de partir Ă l’aventure de la marche Ă pied, nous allons commencer par crĂ©er des programmes de configuration. Dans la version dĂ©finitive du projet, ils seront rĂ©ordonnĂ©s en plaçant en tĂȘte dans la liste les plus utilisĂ©s quand la sonde sera posĂ©e sur Mars. Pour l’heure, nous les nommerons dans l’ordre d’Ă©laboration.
Premier Ă encombrer la liste, nous allons reprendre « p01*« et nous contenter d’optimiser ses procĂ©dures avant de les intĂ©grer dans P30_Programme COMPLET.ino. Ce module ne permet pas Ă la sonde de se dĂ©placer. Il ne fait que lui imposer une configuration particuliĂšre, c’est Ă dire une combinaison rĂ©flĂ©chie d’orientations prĂ©cises pour les douze articulations. Il est fort probable que pour dĂ©placer JEKERT nous aurons Ă invoquer plusieurs configurations successives. Aussi l’idĂ©e d’optimisation consiste Ă crĂ©er une procĂ©dure paramĂ©trĂ©e.
C’est P07_Optimiser_la_procedure_Configurer.ino qui va constituer les fondations de l’Ă©difice logiciel. Dans ce programme deux approches ont Ă©tĂ© tentĂ©es. La premiĂšre consiste Ă faire appel Ă une instruction Switch (Sortie) insĂ©rĂ©e dans une boucle Ă douze incrĂ©mentations pour envoyer les consignes aux moteurs. Une deuxiĂšme tentative d’optimisation a consistĂ© Ă supprimer la boucle et faire appel Ă douze instructions du type pwm.setPWM(Num_Sortie, 0, Mn); pour piloter chaque moteur. Cette deuxiĂšme version n’est pas la bonne, elle consomme 38 octets de plus.
Ce que montre Ă©galement ce dĂ©monstrateur, c’est que chaque chaĂźne de caractĂšres consomme autant d’octets dans la mĂ©moire dynamique qu’elle contient de caractĂšres. Tout « bavardage » est donc pĂ©nalisant. Il serait judicieux de ranger ces textes dans la mĂ©moire non volatile EEPROM du microcontrĂŽleur. Reste Ă en Ă©valuer la rentabilitĂ© car il faut ajouter les routines d’Ă©changes de donnĂ©es.
Méthode pour développer une configuration.
L’exploitation de la sonde martienne fait apparaĂźtre dĂšs le dĂ©part la nĂ©cessitĂ© de prĂ©voir plusieurs configurations typiques. De plus, quand on va chercher Ă gĂ©rer les dĂ©placements, il sera certainement indispensable de dĂ©terminer des postures intermĂ©diaires. La premiĂšre action consiste Ă utiliser les dessins et Ă construire une Ă©pure prĂ©cise de ce que l’on dĂ©sire obtenir. Logiquement, il suffirait alors sur le dessin de mesurer les angles de position angulaire. Portant ces angles dans douze consignes, normalement nous obtiendrions ce qui est prĂ©vu. Ăa c’est de la thĂ©orie. Dans la pratique, on a limitĂ© les amplitudes de dĂ©placement, on interpole entre les deux pour « linĂ©ariser » le positionnement. La dispersion de caractĂ©ristiques engendre des positionnements un peu imprĂ©cis.
ConcrÚtement, on va établir un lien entre théorie et pratique de la façon suivante :
âą Ă partir de l’Ă©pure on estimera les positions angulaires,
⹠On codera les valeurs théoriques dans le démonstrateur et on déclenchera le programme concerné,
âą Ă l’aire du dĂ©monstrateur on affinera les positions manuellement,
âą Position « parfaite » on reportera servomoteur par servomoteur la valeur de consigne affichĂ©e Ă
  l’Ă©cran dans le programme dĂ©monstrateur.
P02 : Configuration décollage.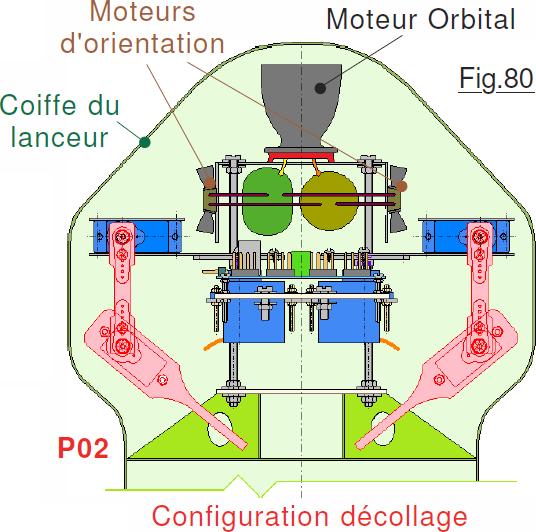
LogĂ©e sous la coiffe du lanceur Ariane et bien calĂ©e sur son berceau, il importe de configurer la charge utile de la fusĂ©e pour qu’elle occupe le volume le plus rĂ©duit possible. Plus le diamĂštre et la hauteur de la coiffe seront faibles, et moins sera onĂ©reux le coĂ»t du lancement. On gagne en poids de la coiffe, en rĂ©sistance Ă la traversĂ©e atmosphĂ©rique etc. La Fig.80 simule l’agencement plausible d’une sonde sur un lanceur comme Ariane. La fusĂ©e se contente gĂ©nĂ©ralement de satelliser la charge utile en orbite haute. Puis, le vaisseau en partance pour une exploration du systĂšme solaire possĂšde son propre moteur d’injection en orbite trans-planĂ©taire. Il doit possĂ©der des petits moteurs de manĆuvre qui assurent son orientation prĂ©cise lors des poussĂ©es du moteur principal. Quand la sonde « dĂ©boule » dans la sphĂšre d’influence de la planĂšte visĂ©e, elle s’oriente en rĂ©trograde et freine pour se mettre en orbite. Ce n’est qu’ensuite, l’orbite Ă©tant affinĂ©e avec prĂ©cision, que sera produit la sĂ©paration et le largage de la sonde, Ă un instant critique pour qu’elle se pose sur le « landing site » prĂ©vu pour la mission.
Dans le but d’Ă©valuer les optimisations logicielles dans P07_Optimiser_la_procedure_Configurer.ino on va comme deuxiĂšme programme faisant appel Ă la routine void CONFIGURER(…) Ă©tablir la configuration de lancement. Ce sera le premier programme « opĂ©rationnel » qui sera invoquĂ© lors de l’une des phases primordiale de la mission. AprĂšs avoir imaginĂ© d’escamoter les Griffes vers le dessus de la structure de la sonde, (Ce qui ne serait pas avantageux car la zone est encombrĂ©e par le moteur orbital et ses rĂ©servoirs d’ergols.) diverses Ă©tudes sur Ă©pures montrent que le volume le plus faible sera celui de la Fig.81 compatible avec un « maĂźtre couple » raisonnable. Le « maĂźtre couple » est la surface du mobile vu face Ă son dĂ©placement. Il est significatif de la rĂ©sistance aĂ©rodynamique qui sera subie par le mobile. Cette configuration est obtenue en plaçant les Tibias Ă la verticale, les Griffes Ă©tant escamotĂ©es sur le dessous en mĂ©nageant un espace de sĂ©curitĂ© avec le bouclier. Par ailleurs, l’encombrement latĂ©ral qui conditionne directement le diamĂštre de la coiffe devra ĂȘtre minimisĂ©. On optimise ce paramĂštre en plaçant les deux FĂ©murs convergents dans la direction transversale BĂąbord / Tribord sans pour autant se toucher. Dans cette posture des quatre Jambes on obtient la Largeur minimale. Le programme « p02*« se charge de rĂ©aliser la configuration de dĂ©collage. Pour dĂ©velopper cette sĂ©quence il est prĂ©cisĂ© en fin du chapitre prĂ©cĂ©dent :
Ă l’aire du dĂ©monstrateur on affinera les positions manuellement. Vous pouvez le faire avec le clavier et le dialogue USB avec P07_Optimiser …ino. Ceci dit, si vous prĂ©fĂ©rez obtenir les consignes en utilisant le potentiomĂštre, rien n’interdit de tĂ©lĂ©verser P08_Piloter_au_potentiometre.ino associĂ© Ă sa fiche d’utilisation.

L’atterrissage : Une phase particuliĂšrement critique de la mission.
Optimiser la procĂ©dure de service void CONFIGURER(…) va nous amener Ă tenter divers codages, puis de comparer la taille de la routine et le coĂ»t en octets chaque fois que l’on fait appel Ă cette derniĂšre. Plusieurs approches sont envisageables. Pour effectuer cette Ă©tude, vous avez compris qu’il faudra deux autres postures. Chaque fois que l’on ajoutera une configuration, il sera facile d’observer l’augmentation de taille du logiciel. Il serait envisageable de rĂ©utiliser les valeurs angulaires de « p01*« ou « p02*« sachant que la taille du logiciel ne dĂ©pend pas des donnĂ©es de position. C’est un peu « idiot », car on a tĂ©lĂ©versĂ© P08_Piloter_au_potentiometre.ino par exemple, alors autant se faire un petit tableau dans lequel on collecte les valeurs pour d’autres postures. Dans le chapitre qui suit, nous allons Ă©tablir la configuration atterrissage.
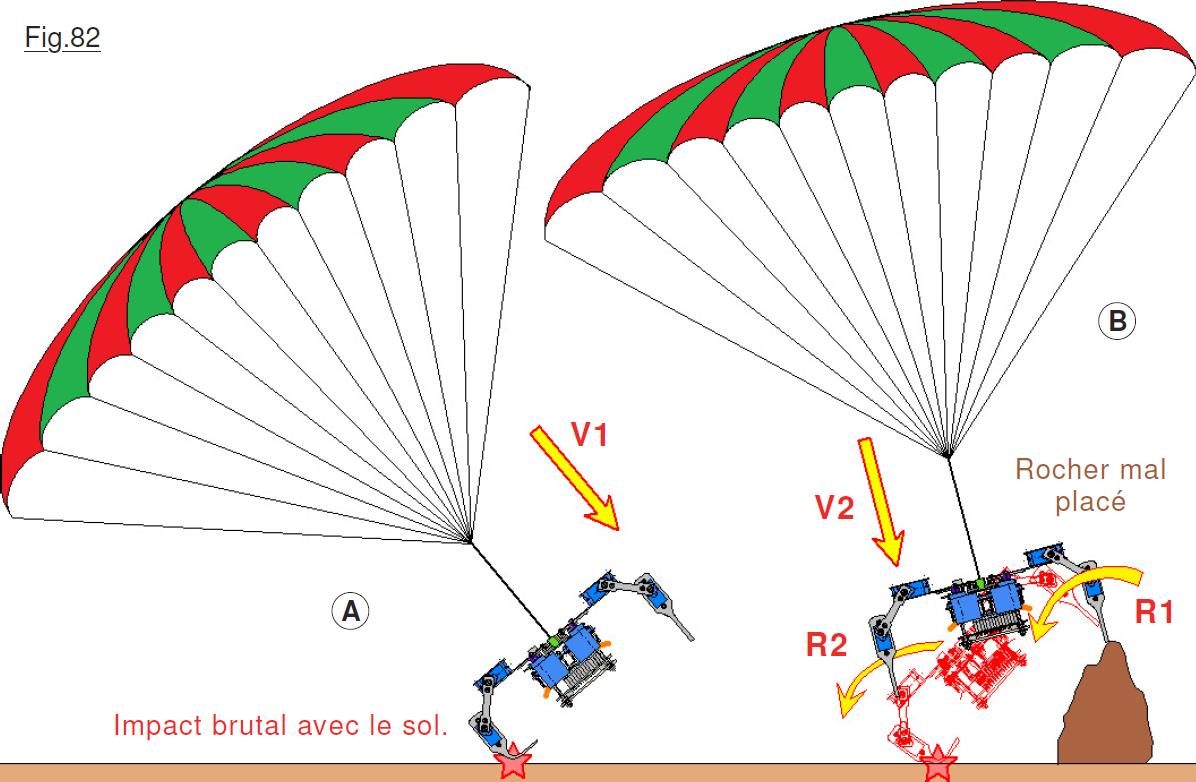
Diverses techniques ont Ă©tĂ© utilisĂ©es pour poser des explorateurs sur Mars. L’une des plus simples, celle qui sera utilisĂ©e pour JEKERT, consiste Ă utiliser des parachutes. Le dĂ©roulement de la descente Ă Ă©tĂ© explicitĂ© dans le chapitre La bestiole robotique prend corps en bas de la page 25 du didacticiel. Nous allons nous contenter dans ce chapitre d’examiner les dangers qui guettent la sonde au moment de son impact avec le sol. Sur la Fig.82 sont reprĂ©sentĂ©s les dangers les plus probables. En A la vitesse V1 est un peu trop importante, l’arrivĂ©e se faisant par une mĂ©tĂ©o pas trĂšs favorable. L’impact avec le sol est suffisamment Ă©nergique pour plier la Griffe qui touche en premier. (Ou sans la plier endommage les articulations des moteurs.) En B la vitesse d’arrivĂ©eV1 est convenable, mais pas de chance juste sous l’une des Griffes critiques se trouve un vilain rocher. Il en rĂ©sulte un dĂ©but de rotation R1 qui peut s’avĂ©rer suffisant pour que l’impact de l’autre Griffe la dĂ©truise. Pour peu que le parachute tire sur le mauvais cotĂ©, associĂ© Ă R1 il peut engendrer le basculement R2, la sonde se couchant sur le cotĂ©. Dans tous les cas la mission serait un triste Ă©chec.
P03 : Configuration atterrissage.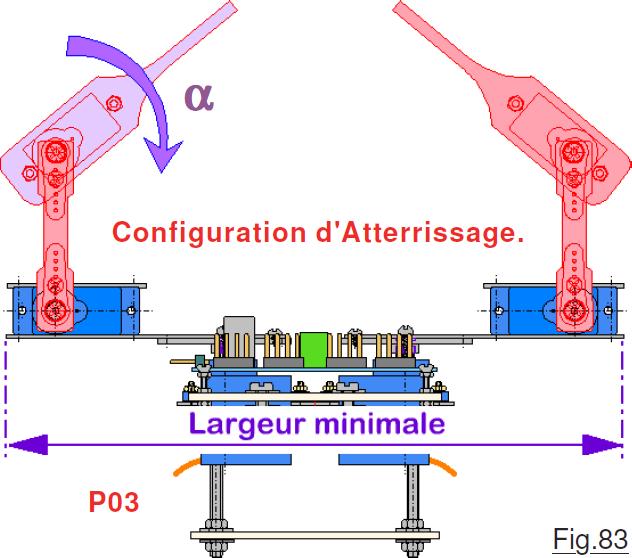
Ăliminer radicalement le risque A revient Ă ce que la sonde percute le sol non pas sur ses Jambes, mais sur le bouclier trĂšs rĂ©sistant et conçu Ă cet effet. Le choc vers les organes de la sonde Ă©tant attĂ©nuĂ© par des amortisseurs Ă©lastiques de type « silentblocs ». Pour Ă©liminer au maximum le risque B on va minimiser la surface de JEKERT vue du sol. Ainsi, si elle se pose Ă proximitĂ© d’un rocher, elle ne basculera pas le contact rocheux Ă©tant alors peu probable. Comme montrĂ© sur la Fig83 l’idĂ©e qui prĂ©side consiste Ă ramener les quatre Jambes complĂštement au dessus de la sonde. La morphologie adoptĂ©e envisageait dĂšs le dĂ©but cette configuration qui est obtenue en plaçant les Tibias Ă la verticale et les Pieds en butĂ©e logicielle α. Par ailleurs, l’encombrement latĂ©ral qui conditionne directement le risque de toucher un rocher devra ĂȘtre minimisĂ©. On optimise ce paramĂštre en plaçant les divers FĂ©murs dans une direction qui inscrit, vu de dessus, le volume enveloppe dans le cercle le plus petit possible. Dans cette posture des quatre Jambes on obtient la Largeur minimale. Le programme « p03*« se chargera de rĂ©aliser la configuration d’atterrissage. Pour dĂ©velopper cette sĂ©quence profiter du programme P08_Piloter_au_potentiometre.ino qui a Ă©tĂ© tĂ©lĂ©chargĂ© dans l’ATmega328 pour Ă©tudier la posture de dĂ©collage. Je vous invite fortement Ă en profiter pour trouver les angles correspondant aux deux autres configurations abordĂ©es dans les chapitres qui suivent.
Instabilité et risque de basculement.
Fondamentale, c’est la posture qui sera la plus utilisĂ©e lors de l’exploitation de l’engin scientifique. Tout au moins si l’Ă©laboration du logiciel s’en tient aux premiĂšres estimations. En effet, des Ă©tudes prĂ©liminaires semblent s’orienter vers des dĂ©placements qui seront tous initiĂ©s Ă partir de cette posture. En quoi la configuration est-elle STABLE et surtout RAISONNABLE ?
Un ensemble matĂ©riel sera d’autant plus stable :
⹠Que son centre de gravité est proche du sol, (Attention à la garde au sol pour un mobile.)
âą Que sa surface de sustentation est importante.
ConsidĂ©rons la Fig.84 qui montre l’ensemble mobile vu de dessus avec son centre de gravitĂ© G. Les points C1, C2, C3 et C4 sont les divers contacts entre le mobile et le sol Ă l’instant considĂ©rĂ©. Par dĂ©finition la surface de sustentation S est la zone au sol qui « encercle » les divers points de contact avec ce dernier. Plus cette surface est grande, plus nous aurons des chances que le centre de gravitĂ© G se trouve au dessus. DĂšs qu’il sort verticalement de cette zone, l’ensemble bascule. Augmenter l’empattement amĂ©liore l’Ă©quilibre, raison pour laquelle il sera avantageux pour la stabilitĂ© d’Ă©carter au maximum les contacts des divers membres avec le sol. (Ce serait Ă©galement vrai avec un mobile roulant.)
Envisageons maintenant le cas particulier de la Fig.85 pour lequel la sonde s’est posĂ©e sur une surface pas trop inclinĂ©e. Pas de change, l’une des pattes est arrivĂ©e en contact exactement sur un vilain rocher R. On retrouve les divers contacts C1… C2 avec la surface martienne et l’on en dĂ©duit le contour S de la surface de sustentation. Placer le centre de gravitĂ© proche du sol diminue le risque de basculement si la surface est inclinĂ©e. Dans le cas G1 le centre de gravitĂ© Ă©tant assez bas, la verticale place le poids P1 au dessus de S. La sonde ne bascule pas. Par contre, si l’ensemble posĂ© est relativement haut, le  centre de gravitĂ© G2 voit sa verticale sortir de la surface de sustentation S. Le poids P2 engendre alors un basculement et la mission restera un tristounet Ă©chec. Dommage !
centre de gravité G2 voit sa verticale sortir de la surface de sustentation S. Le poids P2 engendre alors un basculement et la mission restera un tristounet échec. Dommage !
CONCLUSION : Chercher Ă placer le centre de gravitĂ© le plus bas possible sur l’engin d’exploration conduira Ă minimiser les risques de basculement sur plan inclinĂ©. C’est du reste la raison qui avait prĂ©sidĂ© lorsque l’on a dĂ©cidĂ© de placer les servomoteurs des hanches sur le dessus du chĂąssis. la structure Ă©tant plus basse la stabilitĂ© n’en serait que meilleure. La garde au sol restait acceptable : Agencement adoptĂ© !
Configuration raisonnable.
Posture Ă soigner avec attention puisqu’elle va jouer un rĂŽle important dans les dĂ©placements de JEKERT, elle va forcĂ©ment rĂ©sulter de compromis, comme pour tout agencement d’un matĂ©riel technique. AssurĂ©ment, l’attitude de la Fig.86 est rassurante au point de vue de la stabilitĂ©. On a Ă©cartĂ© les Jambes au maximum pour Ă©taler le plus possible la surface de sustentation. Malheureusement cette gĂ©omĂ©trie n’est pas raisonnable pour deux raisons. La premiĂšre, une garde au sol
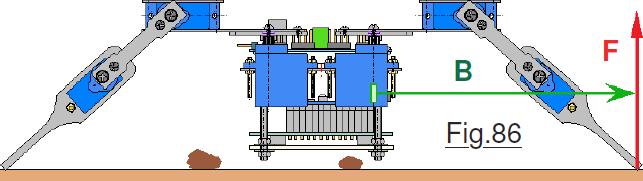 bien trop faible. Le plus petit caillou va frotter sous le bouclier. Et surtout, la force F exercĂ©e par le sol sur la Griffe prĂ©sente un bras de levier B vraiment exagĂ©rĂ© qui va soumettre les articulations Ă des contraintes insupportables sur le long terme. Ce phĂ©nomĂšne sera d’autant plus prĂ©judiciable Ă la longĂ©vitĂ© du matĂ©riel que cette posture sera adoptĂ©e la majoritĂ© du temps en exploitation. (Revoir les notions de contraintes chapitre Propagation des efforts dans un mĂ©canisme.)
bien trop faible. Le plus petit caillou va frotter sous le bouclier. Et surtout, la force F exercĂ©e par le sol sur la Griffe prĂ©sente un bras de levier B vraiment exagĂ©rĂ© qui va soumettre les articulations Ă des contraintes insupportables sur le long terme. Ce phĂ©nomĂšne sera d’autant plus prĂ©judiciable Ă la longĂ©vitĂ© du matĂ©riel que cette posture sera adoptĂ©e la majoritĂ© du temps en exploitation. (Revoir les notions de contraintes chapitre Propagation des efforts dans un mĂ©canisme.)
Sans dĂ©grader de façon significative la stabilitĂ© de l’explorateur, la Fig.87 prĂ©sente la gĂ©omĂ©trie
 qui sera adoptĂ©e pour une configuration stable rĂ©putĂ©e RAISONNABLE. La Griffe sera placĂ©e en orientation verticale. Ainsi le Pied ne sera plus du tout soumis Ă de la torsion, il ne subira que la poussĂ©e F. Le Tibia sera orientĂ© Ă 45° par rapport au chĂąssis. Cet angle maintient un Ă©talement largement suffisant des contacts avec le sol tout en infligeant au Genou et surtout Ă la Hanche des moments de torsions raisonnables. C’est cette Ă©pure transversale reprĂ©sentĂ©e dans un plan vertical qui va conditionner l’attitude de StabilitĂ© raisonnable, assurant une garde au sol confortable.
qui sera adoptĂ©e pour une configuration stable rĂ©putĂ©e RAISONNABLE. La Griffe sera placĂ©e en orientation verticale. Ainsi le Pied ne sera plus du tout soumis Ă de la torsion, il ne subira que la poussĂ©e F. Le Tibia sera orientĂ© Ă 45° par rapport au chĂąssis. Cet angle maintient un Ă©talement largement suffisant des contacts avec le sol tout en infligeant au Genou et surtout Ă la Hanche des moments de torsions raisonnables. C’est cette Ă©pure transversale reprĂ©sentĂ©e dans un plan vertical qui va conditionner l’attitude de StabilitĂ© raisonnable, assurant une garde au sol confortable.
P04 : Configuration Stable Raisonnable.
EntiĂšrement dĂ©terminĂ©es en Ă©lĂ©vation, la gĂ©omĂ©trie de cette posture doit aussi se voir optimisĂ©e en vue de dessus. C’est le critĂšre « surface de sustentation la plus grande possible » qui va guider la construction de l’Ă©pure relative Ă cette phase des missions martiennes. Le dessin est donnĂ© en Fig.88 (En haut de la page 11 du didacticiel.) sur laquelle les moteurs des Pieds sont coloriĂ©s en bleu pour les situer plus facilement. Les rectangles mis en Ă©vidence en jaune situent les Griffes qui sont en orientation verticale et sur cette reprĂ©sentation observĂ©es en vue de dessus. Pour obtenir la stabilitĂ© maximale dans la direction longitudinale ET dans la direction transversale, nous arrivons rapidement Ă la conclusion que la surface de sustentation sera carrĂ©e et centrĂ©e sur le chĂąssis. Les articulations des Hanches imposent la valeur du cotĂ© qui avoisine 163mm. Le tracĂ© prĂ©cis de l’Ă©pure situe les angles tels que α Ă environ 48°. Programmer les angles typiques dans « p04*« n’est pas spĂ©cialement facile, car il faut les transposer en valeurs de consigne. De plus, les divers moteurs n’ont pas des caractĂ©ristiques identiques. Aussi, d’une façon pragmatique, dĂ©terminer les grandeurs numĂ©riques Ă affecter aux entiers pour orienter les Hanches consiste Ă se faire un petit gabarit. On dĂ©coupe un carrĂ© de 163mm de cotĂ© dans un morceau de carton quelconque. Au centre on pratique un trou circulaire de 20mm de diamĂštre, c’est suffisant. Puis, Ă l’aide du « Sketch » dĂ©monstrateur P08_Piloter_au_potentiometre.ino quand il est encore prĂ©sent dans l’ATmega328, disposez les Tibias Ă 45° vers le bas. 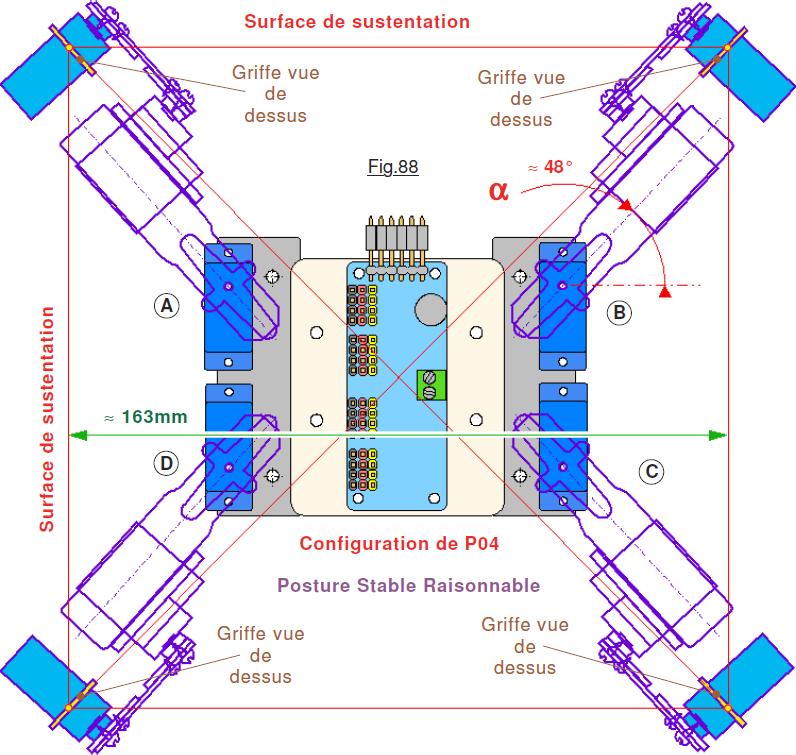
 Orientez verticalement les Griffes. Puis, carrĂ© en carton dĂ©posĂ© sur le dessus des jambes, bien centrĂ© sur le chĂąssis en regardant Ă travers le trou central, dĂ©grossir l’orientation des Hanches. Affiner la direction de chaque Jambe en regardant le patron de guidage bien Ă la verticale en vue plongeante. Quand l’ensemble prĂ©sente un aspect bien symĂ©trique, avec un rĂ©glet mesurer les Ă©carts entre les dessus des Griffe. Corriger finement les positionnements jusqu’Ă ce que les quatre distances soient identiques et que la symĂ©trie « visuelle » par rapport au chĂąssis soit parfaite. (Elles devraient avoisiner toutes les 163mm prĂ©dits sur l’Ă©pure.) Noter alors les valeurs des consignes, « p04*« en dĂ©coule directement.
Orientez verticalement les Griffes. Puis, carrĂ© en carton dĂ©posĂ© sur le dessus des jambes, bien centrĂ© sur le chĂąssis en regardant Ă travers le trou central, dĂ©grossir l’orientation des Hanches. Affiner la direction de chaque Jambe en regardant le patron de guidage bien Ă la verticale en vue plongeante. Quand l’ensemble prĂ©sente un aspect bien symĂ©trique, avec un rĂ©glet mesurer les Ă©carts entre les dessus des Griffe. Corriger finement les positionnements jusqu’Ă ce que les quatre distances soient identiques et que la symĂ©trie « visuelle » par rapport au chĂąssis soit parfaite. (Elles devraient avoisiner toutes les 163mm prĂ©dits sur l’Ă©pure.) Noter alors les valeurs des consignes, « p04*« en dĂ©coule directement.
P05 : Configuration Hauteur Maximale.
Nous n’avons aucune certitude Ă ce stade de l’Ă©laboration du projet que cette posture sera rĂ©ellement utile sur le terrain. Il reste toutefois lĂ©gitime d’imaginer que pour amĂ©liorer la vue vers l’avant du mobile, ou pour passer au dessus d’un rocher qui dĂ©passe lĂ©gĂšrement plus que la hauteur permise par la garde au sol « standard », on veuille organiser gĂ©omĂ©triquement les Jambes pour que le chĂąssis soit le plus haut possible. Vraiment pas de quoi en donner des boutons sur la figure Ă nos ingĂ©nieurs logiciel. Pour se hisser au plus haut de la morphologie de la sonde il suffit de placer verticalement les Tibias et les Griffes. C’est assez enfantin. Comme on va forcĂ©ment diminuer la surface de sustentation, il est logique de conserver pour les Hanches celles « du carré » qui optimise ce paramĂštre. On profite de ces manipulations pour tester la posture avec « p05*« , ceci dit, on n’y passera pas directement. Il faudra probablement user de mouvements coordonnĂ©s pour passer de « p04*« à cette attitude, technique qui sera explicitĂ©e et justifiĂ© plus avant dans le didacticiel …
La suite est ici.