Bien que nous pourrions croire à une sorte d’évidence, le déplacement de tout être vivant disposant de moins de six pattes (Donc quatre ou deux car le nombre est toujours pair pour les espèces actuellement répertoriées sur Terre.) est engendré par un déséquilibre permanent et contrôlé durant tout le mouvement. Notre sonde qui appartient à cette catégorie morphologique n’échappe pas à ce postulat ce qui va nous compliquer singulièrement la tâche.
Lever une jambe sur quatre fait perdre l’équilibre !
Pour comprendre ce phénomène très ennuyeux, nous allons raisonner sur la posture Stable Raisonnable qui conduit à la configuration de la Fig.92 sur laquelle la sonde est vue par le dessus le châssis étant colorié en beige pastel. On retrouve les quatre Jambes repérées par des couleurs différentes. Leurs Griffes respectives sont posées au sol en a, b, c et d déterminant la surface de sustentation carrée coloriée en deux régions jaune vif X et orange clair Y. Supposons que l’exploratrice soulève 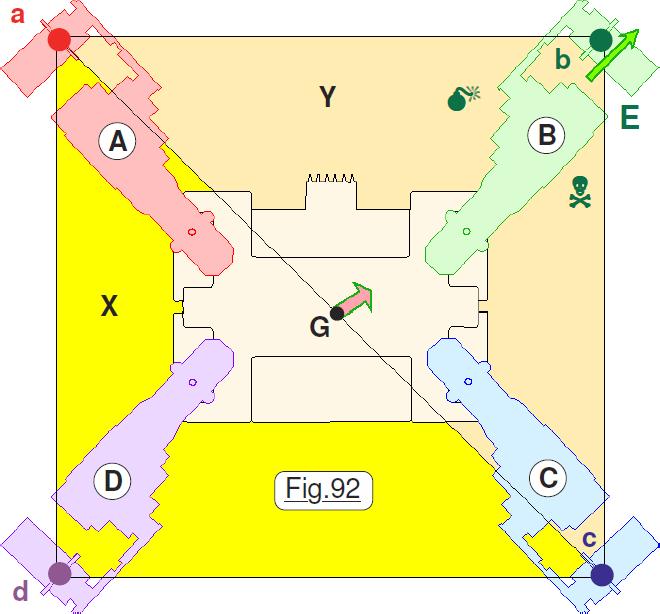 par exemple sa Jambe B. Immédiatement le point b de la Griffe concernée n’est plus en contact avec le sol martien. Brusquement la surface de sustentation est divisée par deux et ne contient plus que la zone X. Le centre de gravité G se trouve alors juste à la limite, amenant l’ensemble à un équilibre strict. Ce ne serait le cas que si la Jambe E ne se déformait pas. Hors pour soulever la Jambe, dans la réalité le Tibia et la Griffe s’écartent vers l’extérieur dans la direction symbolisée par la petite flèche verte E. Le centre de gravité G se déplace par voie de conséquences dans le sens de la flèche centrale orange. Vu de dessus le centre de masse passe donc à l’extérieur de la surface de sustentation jaune et la sonde bascule jusqu’à ce que la jambe soulevée stoppe la rotation résultant de cette perte d’équilibre. Ce phénomène est inexorable, il est impossible de l’empêcher. Nous pouvons suite à cette étude poser les bases de la stratégie qui sera adoptée pour déplacer l’exploratrice :
par exemple sa Jambe B. Immédiatement le point b de la Griffe concernée n’est plus en contact avec le sol martien. Brusquement la surface de sustentation est divisée par deux et ne contient plus que la zone X. Le centre de gravité G se trouve alors juste à la limite, amenant l’ensemble à un équilibre strict. Ce ne serait le cas que si la Jambe E ne se déformait pas. Hors pour soulever la Jambe, dans la réalité le Tibia et la Griffe s’écartent vers l’extérieur dans la direction symbolisée par la petite flèche verte E. Le centre de gravité G se déplace par voie de conséquences dans le sens de la flèche centrale orange. Vu de dessus le centre de masse passe donc à l’extérieur de la surface de sustentation jaune et la sonde bascule jusqu’à ce que la jambe soulevée stoppe la rotation résultant de cette perte d’équilibre. Ce phénomène est inexorable, il est impossible de l’empêcher. Nous pouvons suite à cette étude poser les bases de la stratégie qui sera adoptée pour déplacer l’exploratrice :
Contrainte n°1 : Lever une Jambe devra se faire rapidement, et la déposer sans perdre de temps avant que la sonde n’est le temps de perdre son équilibre.
Principe adopté pour faire avancer JEKERT.
Contrairement à ce que nous chercherions à faire s’il s’agissait de simuler un insecte robotisé, dans ce projet nous n’avons aucune obligation à tenter de copier la nature. Par exemple viser à engendrer une démarche de type « alterne externe interne ». Un animal est optimisé par la nature pour pouvoir accélérer de façon brusque et atteindre rapidement des vitesses élevées. Sa survie en dépend car pour s’alimenter il devient un prédateur … qui lui aussi se trouve dans la chaîne alimentaire. Notre petite machine n’a pas ces problèmes. En revanche il va falloir organiser ses déplacements en plaçant au sommet de la hiérarchie la sécurité. Autrement dit minimiser en toutes circonstances les risques de basculement, l’expérience montrant que ce n’est pas évident du tout. Les méthodes qui seront exposées dans ce tutoriel sont issues de nombreux essais infructueux, une foule d’expériences délicates ayant permis de dégager des « compromis fiables ».
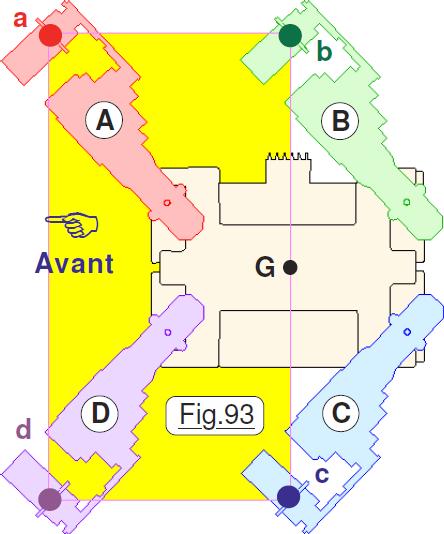 La première étape consiste à adopter la posture de la Fig.93 en soulevant une Jambe, par exemple B. Rapidement on fait tourner la Hanche vers l’avant. Puis immédiatement on la repose. Si l’on respecte la Contrainte n°1 la machine n’aura pas eu le temps de basculer. On fait pareil avec la Jambe C. Lors de ces mouvements élémentaires les trois autres Griffes restant en contact avec le sol, le châssis reste dans sa position initiale. Pour réaliser l’étape suivante en minimisant les glissements au sol, donc les frottements qui en résultent, il sera impératif que les membres restent globalement parallèles symétriquement par rapport à l’axe longitudinal du mobile. Ce critère est respecté sur la Fig.93 dont la géométrie dérive de la posture Stable Raisonnable. En observant la Fig.93 on constate que G se trouve à la limite de la nouvelle surface de sustentation coloriée en jaune. Cet équilibre strict ne convient pas, il faudra changer radicalement la géométrie de départ et surtout celle de cette posture intermédiaire. La deuxième étape de cette « reptation » consiste à faire tourner les quatre hanches simultanément vers l’arrière comme montré sur la Fig.94 engendrant un déplacement
La première étape consiste à adopter la posture de la Fig.93 en soulevant une Jambe, par exemple B. Rapidement on fait tourner la Hanche vers l’avant. Puis immédiatement on la repose. Si l’on respecte la Contrainte n°1 la machine n’aura pas eu le temps de basculer. On fait pareil avec la Jambe C. Lors de ces mouvements élémentaires les trois autres Griffes restant en contact avec le sol, le châssis reste dans sa position initiale. Pour réaliser l’étape suivante en minimisant les glissements au sol, donc les frottements qui en résultent, il sera impératif que les membres restent globalement parallèles symétriquement par rapport à l’axe longitudinal du mobile. Ce critère est respecté sur la Fig.93 dont la géométrie dérive de la posture Stable Raisonnable. En observant la Fig.93 on constate que G se trouve à la limite de la nouvelle surface de sustentation coloriée en jaune. Cet équilibre strict ne convient pas, il faudra changer radicalement la géométrie de départ et surtout celle de cette posture intermédiaire. La deuxième étape de cette « reptation » consiste à faire tourner les quatre hanches simultanément vers l’arrière comme montré sur la Fig.94 engendrant un déplacement 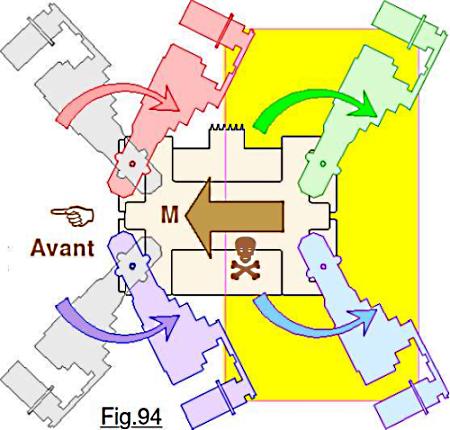 vers l’avant du châssis conséquence qui constitue le but de la manœuvre. Toutefois, cette étape active intermédiaire engendre de réelles difficultés qu’il faut contourner. La première résulte comme pour la posture de la Fig.93 d’une surface de sustentation finale très réduite avec un centre de gravité en position critique. Bien plus délicat, le phénomène d’inertie. Quand le châssis se déplace vers l’avant, mouvement représenté par la grande flèche marron M, il prend de la vitesse. Dès que les servomoteurs stoppent, par inertie l’ensemble continue son déplacement vers l’avant et bascule irrémédiablement sur le nez. La sonde se trouve alors dans une configuration très ennuyeuse, et l’en sortir est franchement délicat. La tentative de la redresser peut se solder par un basculement sur le coté, puis sur le dessus. Cette situation est irrécupérable, la mission dérive alors vers un cuisant échec. Un pas dirigé vers l’arrière présentera exactement un comportement identique orienté dans l’autre sens avec des conséquences aussi néfastes. Pour palier ces phénomènes particulièrement dangereux deux voies possibles sont disponibles :
vers l’avant du châssis conséquence qui constitue le but de la manœuvre. Toutefois, cette étape active intermédiaire engendre de réelles difficultés qu’il faut contourner. La première résulte comme pour la posture de la Fig.93 d’une surface de sustentation finale très réduite avec un centre de gravité en position critique. Bien plus délicat, le phénomène d’inertie. Quand le châssis se déplace vers l’avant, mouvement représenté par la grande flèche marron M, il prend de la vitesse. Dès que les servomoteurs stoppent, par inertie l’ensemble continue son déplacement vers l’avant et bascule irrémédiablement sur le nez. La sonde se trouve alors dans une configuration très ennuyeuse, et l’en sortir est franchement délicat. La tentative de la redresser peut se solder par un basculement sur le coté, puis sur le dessus. Cette situation est irrécupérable, la mission dérive alors vers un cuisant échec. Un pas dirigé vers l’arrière présentera exactement un comportement identique orienté dans l’autre sens avec des conséquences aussi néfastes. Pour palier ces phénomènes particulièrement dangereux deux voies possibles sont disponibles :
Contrainte n°2 : Ralentir le mouvement simultané des Jambes pour minimiser l’énergie cinétique,
Contrainte n°3 : Conserver une surface de sustentation suffisante pour qu’en fin de mouvement le centre de gravité G ne soit pas trop proche de son « périmètre extérieur ».
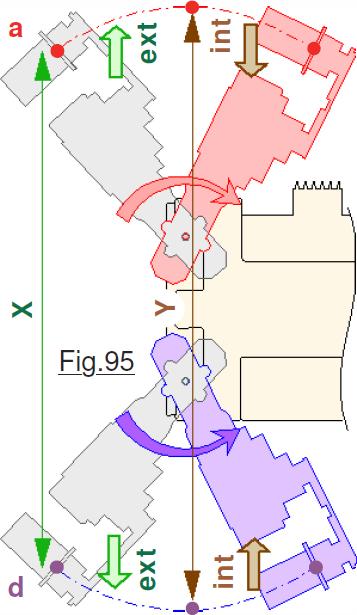 Dernier phénomène complice pour nous compliquer la vie : Le glissement transversal. Considérons le schéma de la Fig.95 qui focalise sur la distance qui sépare latéralement les deux Jambes de devant ou les deux de derrière. Il est manifeste que la distance latérale X qui sépare les deux Griffes en début de mouvement est inférieure à celle en Y lorsque le châssis a effectué la moitié du déplacement longitudinal. Hors durant cette phase les Griffe sont en contact avec le sol. La variation de distance ext puis int engendre un glissement. Ce dernier produit du frottement qui usera les « sabots » en caoutchouc si on peut par la suite en munir les quatre membres, et fait perdre de l’adhérence. La sonde de ce fait n’avancera pas strictement en ligne droite et sera affectée de rotations parasites. Il en résultera des rotations résiduelles qui font perdre la direction initiale. Ce phénomène sera inévitable. Reste à le minimiser :
Dernier phénomène complice pour nous compliquer la vie : Le glissement transversal. Considérons le schéma de la Fig.95 qui focalise sur la distance qui sépare latéralement les deux Jambes de devant ou les deux de derrière. Il est manifeste que la distance latérale X qui sépare les deux Griffes en début de mouvement est inférieure à celle en Y lorsque le châssis a effectué la moitié du déplacement longitudinal. Hors durant cette phase les Griffe sont en contact avec le sol. La variation de distance ext puis int engendre un glissement. Ce dernier produit du frottement qui usera les « sabots » en caoutchouc si on peut par la suite en munir les quatre membres, et fait perdre de l’adhérence. La sonde de ce fait n’avancera pas strictement en ligne droite et sera affectée de rotations parasites. Il en résultera des rotations résiduelles qui font perdre la direction initiale. Ce phénomène sera inévitable. Reste à le minimiser :
Contrainte n°4 : Diminuer au maximum l’amplitude des phénomènes de glissement transversaux et longitudinaux au cours des mouvements assurant l’exploitation au sol de la sonde.
Troisième étape pour faire avancer d’un pas la sonde : Ramener l’ensemble en configuration Stable Transversal. Cette posture sera considérée comme un préalable à tout mouvement élémentaire de type avancer, reculer, tourner etc. Ce n’est qu’une variante de la première étape sauf que pour cette phase ce seront les quatre Jambes qui seront replacées en orientation désirée par soulèvement, orientation de la Hanche puis dépose au sol par une séquence rapide.
Quatrième étape : Confirmer la configuration Stable Transversal. Cette étape sera utile après un mouvement coordonné car les positions finales sont approximatives. La notion de mouvement coordonné est abordée plus avant. L’idée consiste à parfaire l’orientation des articulations conformément aux postures précisées dans les tableaux des fiches spécialisée. Nous allons y revenir lors de l’étude des déplacements à agencer pour l’exploitation de la sonde.
Cinquième et dernière étape : Libérer les efforts résultant des glissements longitudinaux et transversaux. Cette phase ne sera pas forcément indispensable. Elle devra suivre les mouvements élémentaires qui engendrent un frottement important au sol, générant des efforts parasites sur les organes mécaniques. Dans ce cas on annulera ces contraintes en levant et reposant la Jambe rapidement, le cycle étant propagé sur les quatre pattes de l’insecte mécanique.
La marche à suivre pour organiser une séquence de déplacement est établie, il reste maintenant à la concrétiser et écrire les programmes qui animeront JEKERT. Nous allons commencer par des mouvements simples, puis graduellement nous pousserons notre analyse vers des séquences de plus en plus élaborées. La route est toute tracée …
Notre machine est d’une grande légèreté, un rien la perturbe. On se doute qu’un câble d’alimentation électrique sur un mobile de plusieurs centaines de kilogrammes ne va pas beaucoup le perturber. Le cordon ombilical sur JEKERT doit avoir des fils de sections minimales pour l’alimentation des moteurs. S’ils sont de trop petits diamètres les pertes en ligne lors des appels de courant sont trop importantes, et les servomoteurs divergent au point que l’on pourrait penser à des erreurs de programme. Ce cordon électrique pourtant choisi le plus souple possible engendre déjà un déséquilibre latéral sur la frêle machine.
Nombreux sont les jeux mécaniques internes aux servomoteurs dans les articulations qui provoquent des « flous » notables dans les postures programmées. Les pièces du squelette ne sont pas assez rigides et subissent des fléchissements. Les Griffes sont bien trop fines et patinent irrémédiablement sur le sol, y compris si on ajoute des « chaussettes » pour améliorer l’adhérence.
Toutes ces faiblesses s’accumulent pour aboutir à un fonctionnement réel « boiteux ». Tant que la sonde se trouve sur son berceau, les mouvements observés et les postures obtenues sont tout à fait conformes à ce que prévoit le programme. Dès que l’animal artificiel est posé sur ses Jambes, c’est un peu la débâcle. Pour vous donner une idée, quand une patte est levée, toutes les flexions accumulées font qu’elle touche pratiquement le sol !
Soit on repart à zéro et l’on recommence sur une vraie machine, avec un châssis rigide, des moteurs beaucoup plus gros etc. Mais alors on sort de ce qui n’est qu’un loisir pour lequel on se contentera d’un « imparfait acceptable » … sans compter les problèmes de coûts. Soit on accepte tous ces inconvénients. Du coup, la sonde se déplacera de façon incertaine et achèvera certains mouvements avec des écarts par rapport aux prévisions. Il suffira de prendre en compte ces dérives inexorables et prévoir des parades logicielles. Le but fondamental étant de cheminer ensembles pour acquérir une démarche rigoureuse, dans ce contexte on acceptera sans hésiter un résultat approximatif, qui de toute façon reste parfaitement séduisant. Voir se dandiner cette petite machine est assez magique, elle trimballe avec elle une part de rêve et de magie. La dispersion dans les postures et les placements obtenus ne diminue en rien le plaisir de voir JEKERT prendre vie …
Reste qu’actuellement la sonde est « vide ». L’intégration du calculateur n’a pas été étudiée. Si c’est envisageable, l’ajout de capteurs « expérimentaux » serait pour le moins les bienvenus. Cette faisabilité n’a pas encore été évaluée. De toute façon il est évident que les masses seront redistribuées lors de l’assemblage complet de tous les éléments avec un changement de position du centre de gravité. Il y aura certainement remise en cause des postures, et nous serons peut être obligés de revoir les configurations déterminées dans les chapitres qui suivent, d’autant plus qu’ajouter « des chaussettes » ou des capteurs sur les membres en modifie les volumes enveloppe et change les zones de collision. Arf arf arf … c’est dur dur la conception !
La suite est ici.


