

Ailgor Bot est un robot IOIO-OTG de téléprésence.
Les composants principaux du Robot sont les suivants :
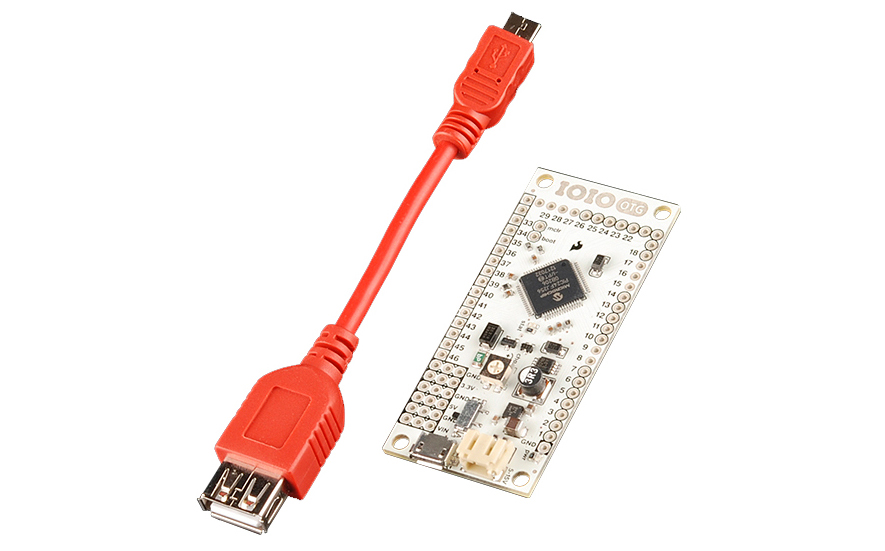
Le cœur du Robot
Microcontrôleur : Platine "IOIO-OTG" pour Android
La tête du Robot
Android : Galaxy S avec KitKat 4.4.2

Le cou du robot
Il sera contrôlé par deux servomoteurs.
Servomoteur Dagu RS001A
Alimentation: 4,8 à 6 Vcc
Course: 2 x 60°
Couple: 1,5 kg.cm à 4,8 Vcc
Vitesse: 0,1 s/60°
Dimensions: 24 x 13 x 29 mm

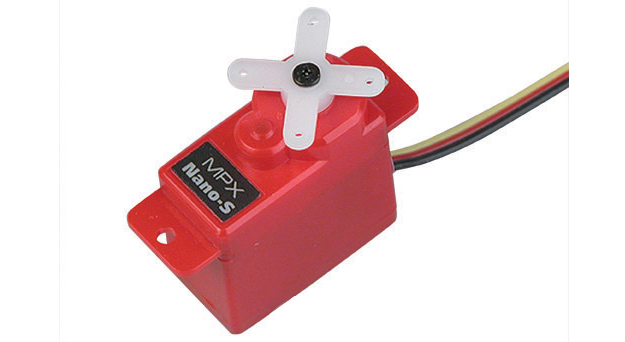
et le Servomoteur miniature "Nano-S"
Dimensions (L x l x h): 23 x 12 x 24 mm
Couple @ 4,8V/6V: 11/13 Ncm
Temps de dépl. 40° @ 4,8V/6V : 0,12 s/0,10 s
Le corps du robot
Base robotique "OL1"
Cette base roulante est constituée d'un châssis transparent, associé à 2 moto-réducteurs 6 Vcc (rapport 1:48), ainsi qu'à 2 roues avec pneu gomme (Ø 65mm) et à une roue folle.
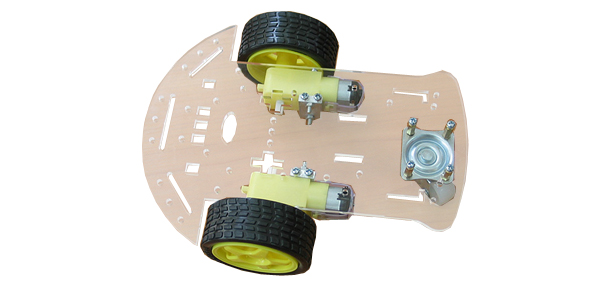
Les moteurs sont associés au circuit de commande moteur (Circuit pont en "H") L293D

Le nez du Robot
Télémètre infrarouge SHARP™ "GP2YOA51SK"
Ce module permet de mesurer des distances par détection infrarouge. Il dispose d'une sortie analogique variant en fonction de la distance (de 2 à 15 cm) de l'objet détecté.

L'énergie du Robot



Les composants principaux du Robot sont les suivants :
Le cœur du Robot
Microcontrôleur : Platine "IOIO-OTG" pour Android
La tête du Robot
Android : Galaxy S avec KitKat 4.4.2
Le cou du robot
Il sera contrôlé par deux servomoteurs.
Servomoteur Dagu RS001A
Alimentation: 4,8 à 6 Vcc
Course: 2 x 60°
Couple: 1,5 kg.cm à 4,8 Vcc
Vitesse: 0,1 s/60°
Dimensions: 24 x 13 x 29 mm
et le Servomoteur miniature "Nano-S"
Dimensions (L x l x h): 23 x 12 x 24 mm
Couple @ 4,8V/6V: 11/13 Ncm
Temps de dépl. 40° @ 4,8V/6V : 0,12 s/0,10 s
Le corps du robot
Base robotique "OL1"
Cette base roulante est constituée d'un châssis transparent, associé à 2 moto-réducteurs 6 Vcc (rapport 1:48), ainsi qu'à 2 roues avec pneu gomme (Ø 65mm) et à une roue folle.
Les moteurs sont associés au circuit de commande moteur (Circuit pont en "H") L293D
Le nez du Robot
Télémètre infrarouge SHARP™ "GP2YOA51SK"
Ce module permet de mesurer des distances par détection infrarouge. Il dispose d'une sortie analogique variant en fonction de la distance (de 2 à 15 cm) de l'objet détecté.
L'énergie du Robot
- Carte chargeur LiPo Pro POW12059P
- Accu Li-Ion 3,7 V 2000 mAh
- Cellule solaire SOL3W 5,5 V/540 mA
















