Salut a tous !
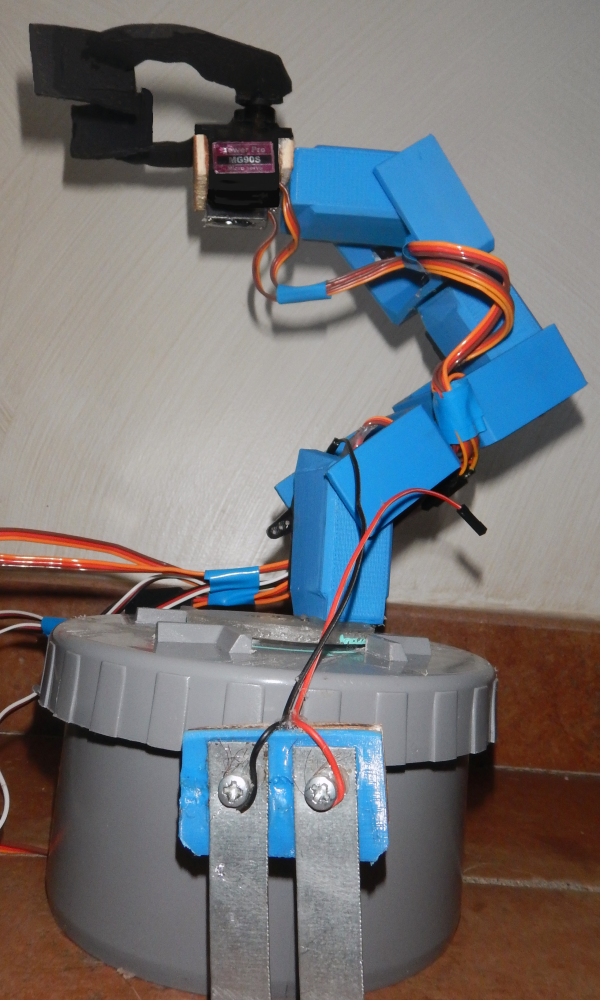
J'ai presque tout fini au niveau du hardware je me penche donc vers le software ;
comme j'ai dis dans ma description l'arduino; ok ça passe je contrôle les servos sans problèmes mais bon j'aimerais plus qu'un simple automate.
je voudrais que le robot puisse interagir avec le monde qui l'entoure donc avoir des capteurs qui puissent lui en donné une image concrète qu'il pourrait analysé.
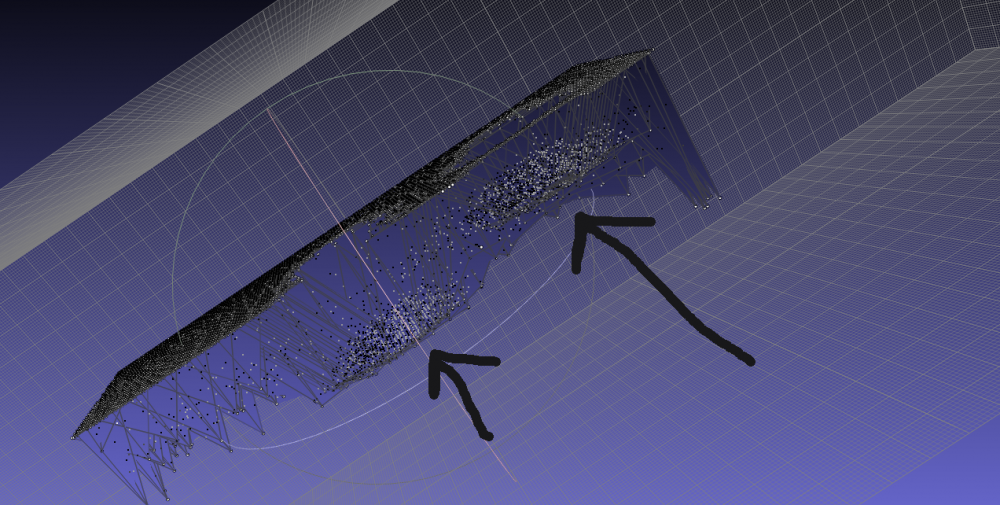
J'ai donc en premier temps utiliser un capteur ultrason basique sr04 et scanner une scène en 3d avec deux servos pour avoir un nuage de points que je stocke dans une carte sd en .stl avec:
x=angle servo1; y= distance du capteur; z =angle servo 2 donc une "image" 3d de 180*180*100 (j'avais limité la porté du capteur)
résultat : catastrophe ! j'ai une scène complètement approximative (cf image1 c'est censé être 2 verres ... lol ) , mais pourquoi ?
en réalité c'est simple à comprendre: le capteur ultrason prends une mesure sur un angle de plus de 20° (ce qui est énorme et bien trop approximatif ) et il y a des problèmes lors de la réflexion du signal dès que l'angle est trop important ;
de plus au final je vois pas trop comment j'aurais pu analyser un nuage de points (+le scan est long presque 3 minutes )
bref c’était nul pour l'application que je veux en faire.
Je cherche une alternative comme par exemple une webcam (j'ai une vielle live cam : http://www.lesnumeriques.com/webcam/microsoft-lifecam-vx-5500-p3868/test.html )
[contrôlée par processing (+opencv ??) ] non plutôt par Java (comme ça je m’entraîne en pour l'isn ) mais je ne sais pas du tout comment faire du traitement vidéo y a il des experts dans la sale ?











 )
)