
bonsoir , je vous demande de l'aide pour la realisation de mon projet qui est un robot suiveur de ligne noir (preference ;) ),avant toutes choses,je n ai jamais construit de robot, je ne sais pas programmer et je n ai aucune connaissance en electronique, pour le projet , pas tros cher(si je peux faire la recuperation dite moi ou sinon budget MAX: 40euro), pas de kit , facile de realisation , et possibilite plus tard de l ameliore . je possede deja des moteurs,interrupteurs et de supports piles.un ami ma envoyer le fichier que je vais mettre plus bas , est il bien ?? pour ceux qui peuvent me donner conseil,je suis prenant avec plaisir :p .merci d avance pour votre aide.
fichier : http://www.robot-maker.com/image/images/567bs2mvcf.jpg

63 réponses à ce sujet
#2

Black Templar
-

- Membres
-

- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 08:54
Salut dydyouaki !
En effet, ce schéma est pas mal. Tu auras un robot qui fonctionne entièrement analogiquement. Tu ne devras donc pas te préoccuper à apprendre la programmation pour le moment.
Je vais te décrire de façon un peu succincte le fonctionnement de ton montage
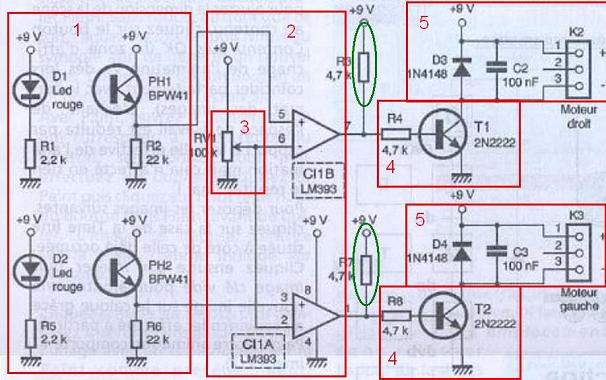
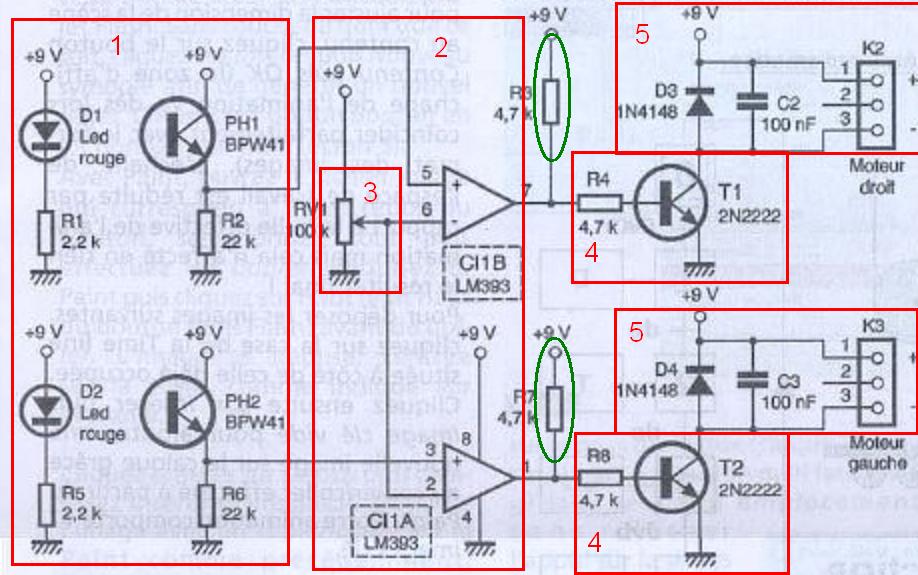
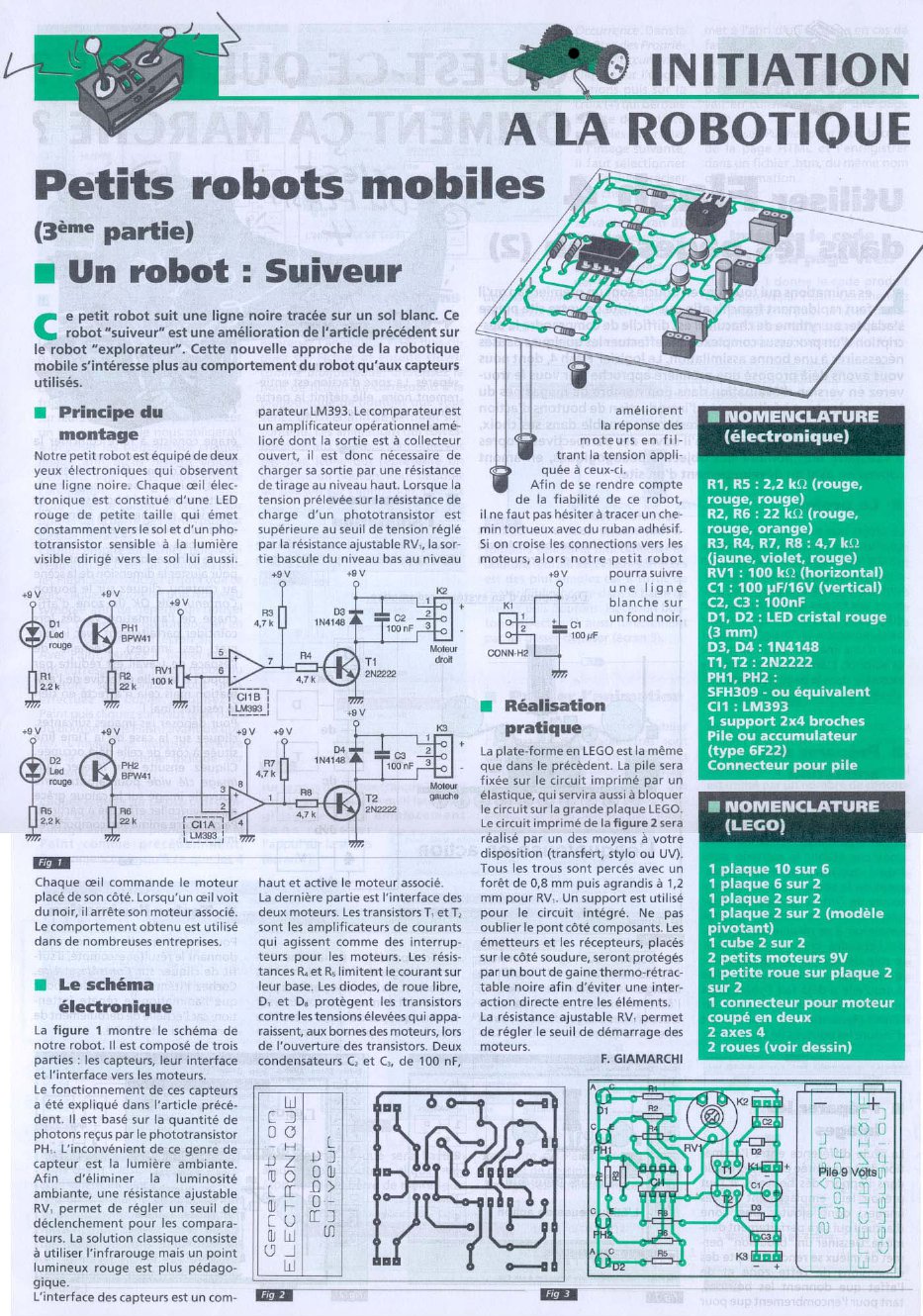
Partie 1 :
La partie numéro une du montage sont tes capteurs. Ici, ils sont composés d'une diode qui émet de la lumière vers le sol et d'un récepteur lumineux qui va détecter la lumière renvoyé par le sol. (Il faut bien faire attention que la diode n'éclaire pas directement le capteur, sinon, l'effet désiré n'aura pas lieu)
Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). De plus, il existe déjà de tels types de capteurs tout en un ! Je te donnerais les références ce soir.
Du coup, sur ton montage, quand le récepteur lumineux reçois de la lumière, il laisse passer le courant. A la sortie de ton capteur tu auras alors 9V (8.4V plutôt) lorsque celui-ci reçoit beaucoup de lumière, 0V s'il n'en reçoit pas et entre 0 et 9V s'il reçoit moyennement de lumière.
Partie 2 :
La seconde partie du montage est construit autour d'un composant appelé amplificateur opérationnel. Ce composant est un petit peu compliquer à comprendre. Ce que tu as besoin de savoir, c'est que celui-ci est monté en mode comparateur.
C'est à dire qu'il va comparer la tension entre la borne + et -.
Si la tension sur la borne + est supérieur à celle sur la borne -, alors la sortie de l'amplificateur opérationnel (borne 1 et 7) sera à 9V, sinon, elle sera à 0V.
Tu connais déjà la tension sur la borne + (c'est celle qui est en sortie des capteurs, donc entre 0V et 9V en fonction de la quantité de lumière reçue)
Pour la tension de comparaison (sur la borne -), elle est déterminée par le potentiomètre (la résistance variable que j'ai numéroté 3) Tu peux donc régler toi même la valeur de la tension de comparaison en réglant le potentiomètre. Cette tension peut donc varier de 0 à 9V. Plus cette tension de comparaison est faible et plus le capteur sera sensible et inversement, plus la tension de comparaison est forte et moins le capteur sera sensible.
La sortie de l'ampli op sera donc soit 0V, soit 9V en fonction que tu te trouve d'un côté ou de l'autre du seuil.
Partie 4 :
La partie 4 est un simple transistor qui va commander tes moteurs. Si la tension à la sortie de l'ampli op est de 9V, alors le transistor est activé et le courant passe du haut vers le bas, sinon, si la tension qui va commandé le transistor (tension à la sortie de l'ampli op) est à 0V, alors le courant ne passe pas et les moteurs ne tournent pas.
Partie 5 :
La partie 5 semble compliqué, mais en fait,il n'en est rien.
Pour le principe, (pour bien comprendre), tu peux supprimer la diode ainsi que le condensateur. Tu vois donc bien qu'il ne te reste qu'un moteur branché au 9V d'un côté et au transistor de commande de l'autre.
Le condensateur sert à "lisser" la tension au borne du moteur. En effet, tu vois bien qu'avec ce montage, le moteur tourne soit à pleine puissance, soit ne tourne pas. Il n'y a pas d'étapes intermédiaires. Du coup, c'est un peu brusque pour le moteur (de passer de 0 à 9V directement et inversement). On ajoute donc un condensateur en parallèle afin de "lisser" la tension. Maintenant, lorsque l'on passe brusquement de 0 à 9V, le condensateur se charge d'abord, ce qui permet de délivrer une tension progressive dans les moteur.
Pour ce qui est de la diode, c'est une simple diode de protection (mais qui est indispensable). Le moteur étant une source de courant, il est dangereux de passer brusquement de 9 à 0V. En effet, le moteur voudra continuer à avoir de l'énergie. La diode est donc une diode de roue libre protégeant ton circuit contre un éventuel crammage. (le courant tournera en boucle dans le moteur en passant par la diode jusqu'à épuisement de l'énergie)
La résistance que j'ai entouré en vert, je ne vois pas trop son utilité.
Sinon, personnellement, j'aurais mis 2 potentiomètres (partie 3), un par amplificateur opérationnel afin de régler leurs seuils séparément. En effet, les capteurs ne sont jamais exactement les mêmes et il est parfois bon de régler leurs sensibilités indépendamment.
En résumé : Lorsque le robot est bien sur la ligne noir, les 2 capteurs son au dessus du blanc, la lumière se réfléchit, les capteurs délivrent une tension qui activent les ampli op et donc les moteurs, le robot ira donc tout droit.
Si un des capteurs passe au dessus de la ligne, la lumière n'est plus réfléchit et donc le moteur du côté du capteur s'arrête, le robot tourne donc jusqu'à ce qu'il soit bien recentré par rapport à la ligne.
Voila pour le fonctionnement.
Maintenant, pour la réalisation, je te conseil de te procurer un petit peu de matériel. A mon avis, investir dans une ladtec pour faire des tests, dans un multimètre bon marché pour visualiser les différentes tensions dans ton montage. Un petit fer à souder aussi pour souder les fils à tes moteurs, ou pour souder les composants si tu as la possibilité de graver/faire graver ton circuit.
A mon avis, tu ne pourras pas beaucoup améliorer un tel montage. Mais pour un premier essai, il est très bien.
Ensuite, tu pourras toujours construire un second robot suiveur de ligne mais cette fois-ci avec un microcontroleur programmable :)
Amuses-toi bien :)
Black Templar
En effet, ce schéma est pas mal. Tu auras un robot qui fonctionne entièrement analogiquement. Tu ne devras donc pas te préoccuper à apprendre la programmation pour le moment.
Je vais te décrire de façon un peu succincte le fonctionnement de ton montage
Partie 1 :
La partie numéro une du montage sont tes capteurs. Ici, ils sont composés d'une diode qui émet de la lumière vers le sol et d'un récepteur lumineux qui va détecter la lumière renvoyé par le sol. (Il faut bien faire attention que la diode n'éclaire pas directement le capteur, sinon, l'effet désiré n'aura pas lieu)
Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). De plus, il existe déjà de tels types de capteurs tout en un ! Je te donnerais les références ce soir.
Du coup, sur ton montage, quand le récepteur lumineux reçois de la lumière, il laisse passer le courant. A la sortie de ton capteur tu auras alors 9V (8.4V plutôt) lorsque celui-ci reçoit beaucoup de lumière, 0V s'il n'en reçoit pas et entre 0 et 9V s'il reçoit moyennement de lumière.
Partie 2 :
La seconde partie du montage est construit autour d'un composant appelé amplificateur opérationnel. Ce composant est un petit peu compliquer à comprendre. Ce que tu as besoin de savoir, c'est que celui-ci est monté en mode comparateur.
C'est à dire qu'il va comparer la tension entre la borne + et -.
Si la tension sur la borne + est supérieur à celle sur la borne -, alors la sortie de l'amplificateur opérationnel (borne 1 et 7) sera à 9V, sinon, elle sera à 0V.
Tu connais déjà la tension sur la borne + (c'est celle qui est en sortie des capteurs, donc entre 0V et 9V en fonction de la quantité de lumière reçue)
Pour la tension de comparaison (sur la borne -), elle est déterminée par le potentiomètre (la résistance variable que j'ai numéroté 3) Tu peux donc régler toi même la valeur de la tension de comparaison en réglant le potentiomètre. Cette tension peut donc varier de 0 à 9V. Plus cette tension de comparaison est faible et plus le capteur sera sensible et inversement, plus la tension de comparaison est forte et moins le capteur sera sensible.
La sortie de l'ampli op sera donc soit 0V, soit 9V en fonction que tu te trouve d'un côté ou de l'autre du seuil.
Partie 4 :
La partie 4 est un simple transistor qui va commander tes moteurs. Si la tension à la sortie de l'ampli op est de 9V, alors le transistor est activé et le courant passe du haut vers le bas, sinon, si la tension qui va commandé le transistor (tension à la sortie de l'ampli op) est à 0V, alors le courant ne passe pas et les moteurs ne tournent pas.
Partie 5 :
La partie 5 semble compliqué, mais en fait,il n'en est rien.
Pour le principe, (pour bien comprendre), tu peux supprimer la diode ainsi que le condensateur. Tu vois donc bien qu'il ne te reste qu'un moteur branché au 9V d'un côté et au transistor de commande de l'autre.
Le condensateur sert à "lisser" la tension au borne du moteur. En effet, tu vois bien qu'avec ce montage, le moteur tourne soit à pleine puissance, soit ne tourne pas. Il n'y a pas d'étapes intermédiaires. Du coup, c'est un peu brusque pour le moteur (de passer de 0 à 9V directement et inversement). On ajoute donc un condensateur en parallèle afin de "lisser" la tension. Maintenant, lorsque l'on passe brusquement de 0 à 9V, le condensateur se charge d'abord, ce qui permet de délivrer une tension progressive dans les moteur.
Pour ce qui est de la diode, c'est une simple diode de protection (mais qui est indispensable). Le moteur étant une source de courant, il est dangereux de passer brusquement de 9 à 0V. En effet, le moteur voudra continuer à avoir de l'énergie. La diode est donc une diode de roue libre protégeant ton circuit contre un éventuel crammage. (le courant tournera en boucle dans le moteur en passant par la diode jusqu'à épuisement de l'énergie)
La résistance que j'ai entouré en vert, je ne vois pas trop son utilité.
Sinon, personnellement, j'aurais mis 2 potentiomètres (partie 3), un par amplificateur opérationnel afin de régler leurs seuils séparément. En effet, les capteurs ne sont jamais exactement les mêmes et il est parfois bon de régler leurs sensibilités indépendamment.
En résumé : Lorsque le robot est bien sur la ligne noir, les 2 capteurs son au dessus du blanc, la lumière se réfléchit, les capteurs délivrent une tension qui activent les ampli op et donc les moteurs, le robot ira donc tout droit.
Si un des capteurs passe au dessus de la ligne, la lumière n'est plus réfléchit et donc le moteur du côté du capteur s'arrête, le robot tourne donc jusqu'à ce qu'il soit bien recentré par rapport à la ligne.
Voila pour le fonctionnement.
Maintenant, pour la réalisation, je te conseil de te procurer un petit peu de matériel. A mon avis, investir dans une ladtec pour faire des tests, dans un multimètre bon marché pour visualiser les différentes tensions dans ton montage. Un petit fer à souder aussi pour souder les fils à tes moteurs, ou pour souder les composants si tu as la possibilité de graver/faire graver ton circuit.
possibilite plus tard de l ameliore
A mon avis, tu ne pourras pas beaucoup améliorer un tel montage. Mais pour un premier essai, il est très bien.
Ensuite, tu pourras toujours construire un second robot suiveur de ligne mais cette fois-ci avec un microcontroleur programmable :)
Amuses-toi bien :)
Black Templar
#3
dydyouaki
-
- Membres
-
- 792 messages
Membre passionné
- Gender:Male
Posté 25 mai 2011 - 09:42
merci beaucoup pour cette reponse , a la fois rapide et claire :) [quote"black templar"]Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). La résistance que j'ai entouré en vert, je ne vois pas trop son utilité. Sinon, personnellement, j'aurais mis 2 potentiomètres (partie 3), un par amplificateur opérationnel afin de régler leurs seuils séparément. En effet, les capteurs ne sont jamais exactement les mêmes et il est parfois bon de régler leurs sensibilités indépendamment.
[/quote]
donc d apres toi je devrais :
_utiliser des LEDS infrarouge
_enlever les resistances en vert
_mettre 2 potentiometres ,un pour chaque amplificateur ??
mais si je fais ce que tu dit , sa ne posera pas de probleme au circuit ?? et quel potentiometres prendre ?? merci d avance :)
[/quote]
donc d apres toi je devrais :
_utiliser des LEDS infrarouge
_enlever les resistances en vert
_mettre 2 potentiometres ,un pour chaque amplificateur ??
mais si je fais ce que tu dit , sa ne posera pas de probleme au circuit ?? et quel potentiometres prendre ?? merci d avance :)
#4
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 09:49
N'enlève pas la résistance verte ! Ce n'est pas parce que je ne comprend pas son utilité qu'elle est inutile :p
Sinon, pour le reste, ce ne sont que des suggestion pour améliorer le robot. Il marchera très bien tel qu'il est actuellement ! Donc je te conseil de ne rien changer ! surtout étant débutant, il vaut mieux suivre les instructions de la revue à la lettre :)
Je t'ai juste parlé de ces modifications pour que tu aies une idée de ce qu'on peut modifier. Si tu fais ces modification, le PCB présent dans la revue ne marchera plus et tu devras en re-design-er un, donc autant ne rien modifier et utiliser le PCB du magasine :)
Sinon, pour le reste, ce ne sont que des suggestion pour améliorer le robot. Il marchera très bien tel qu'il est actuellement ! Donc je te conseil de ne rien changer ! surtout étant débutant, il vaut mieux suivre les instructions de la revue à la lettre :)
Je t'ai juste parlé de ces modifications pour que tu aies une idée de ce qu'on peut modifier. Si tu fais ces modification, le PCB présent dans la revue ne marchera plus et tu devras en re-design-er un, donc autant ne rien modifier et utiliser le PCB du magasine :)
#5
dydyouaki
-
- Membres
-
- 792 messages
Membre passionné
- Gender:Male
Posté 25 mai 2011 - 11:06
d accord pas de probleme , merci ;) bon j ai acheter les condensateurs,les resistances,les transistors et les diodes dans un magasin pas tres loin de chez moi ;) le reste c est sur conrad.fr et sa arrivera dans une petite semaine(probleme avec le transporteur :) ) voila donc je vous tiens au courant pour la phase de construction :P derniere question quels genre de moteurs me faut il , des pas a pas, des CC , ou autres ?? et quel modele ??
#6
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 12:20
Il te faut des moteurs CC classique.
Par contre, je ne peux pas te conseiller là dessus, je n'y connais rien :/
Il faut donc que tu dimensionnes les moteurs comme il faut (quelle puissance, présence d'un réducteur ou non, etc.)
Par contre, je ne peux pas te conseiller là dessus, je n'y connais rien :/
Il faut donc que tu dimensionnes les moteurs comme il faut (quelle puissance, présence d'un réducteur ou non, etc.)
#8
Astondb8-RX
-

- Membres
-
- 295 messages
Habitué
Posté 25 mai 2011 - 03:07
Bonjour,
Parfaite cette explication de circuit.
Juste une chose, le potentiomètre sert plus a équilibrer les deux Amplis OP. Les résistances R2 et R6 sont montées en ponts diviseurs des 9v. Ces résistances (selon leur pourcentage de précision) ne seront donc pas exactement de la même valeur et donc pas exactement à 22K chacune .
Un seul potentiomètre pour équilibrer les tensions permettra d'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit. mettre deux potentiomètres risque juste de compliquer le reglage
Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère.
Effectivement les capacités C2 et C3 sont plus quindispensables pour absorber les fortes tentions de démarrage. Mais je dirais que les 100mF sont à adapter en fonction de la puissance de tes moteurs.
Comme le dit justement Black Templar, ils servent a absorber un peux de courant au démarrage e donc d'éviter les démarrages brusques. Mais sur de gros moteurs, ces petites valeurs ne seront pas des tampons suffisants. Donc soit tu utilises de petit moteurs et les valeurs sont bonnes, soit tu utilises de gros moteurs et du devras augmenter ces valeurs en fonction de la puissance de tes moteurs.
Pour les moteurs, à pas cher et suffisant pour ton montage, je te conseille ces moteurs, ils sont très bien et simple à mettre en ouvre. Je les utilise sur mon robot et j'en suis contant (pour une utilisation ne demandant pas une énorme précision. Après il y a mieux mais plus dans la même gamme de prix.
Cdlt
Yves
Parfaite cette explication de circuit.
Juste une chose, le potentiomètre sert plus a équilibrer les deux Amplis OP. Les résistances R2 et R6 sont montées en ponts diviseurs des 9v. Ces résistances (selon leur pourcentage de précision) ne seront donc pas exactement de la même valeur et donc pas exactement à 22K chacune .
Un seul potentiomètre pour équilibrer les tensions permettra d'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit. mettre deux potentiomètres risque juste de compliquer le reglage
Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère.
Effectivement les capacités C2 et C3 sont plus quindispensables pour absorber les fortes tentions de démarrage. Mais je dirais que les 100mF sont à adapter en fonction de la puissance de tes moteurs.
Comme le dit justement Black Templar, ils servent a absorber un peux de courant au démarrage e donc d'éviter les démarrages brusques. Mais sur de gros moteurs, ces petites valeurs ne seront pas des tampons suffisants. Donc soit tu utilises de petit moteurs et les valeurs sont bonnes, soit tu utilises de gros moteurs et du devras augmenter ces valeurs en fonction de la puissance de tes moteurs.
Pour les moteurs, à pas cher et suffisant pour ton montage, je te conseille ces moteurs, ils sont très bien et simple à mettre en ouvre. Je les utilise sur mon robot et j'en suis contant (pour une utilisation ne demandant pas une énorme précision. Après il y a mieux mais plus dans la même gamme de prix.
Cdlt
Yves
#9
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 03:28
[quote"Astondb8"]Juste une chose, le potentiomètre sert plus a équilibrer les deux Amplis OP. Les résistances R2 et R6 sont monté comme des ponts diviseurs de la tension 9v. Ces résistances selon leur pourcentage de précision ne seront donc pas exactement de la même valeur et donc pas à exactement à 22K chacune .
Un seul potentiomètre pour équilibrer les tensions permettrons de t'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit.[/quote]
Ah bon ?? tu es sur de toi ??
Pour moi, le potentiomètre sert seulement à définir un seuil de comparaison avec les tensions aux bornes + des ampli op !
Si tu veux t'assurer que les 2 moteurs avancent à la même vitesse, il faut 2 potentiomètres indépendants ! Là, si tu laisses un seul potar, tu ne peux pas compenser l'erreur comme il faut (même si dans ce montage, ça importe peu (voir pas ^^))
Il faudra que je me refasse une piqûre de rappel sur les transistors bipolaire, mais il me semble que ce montage est à collecteur commun. C'est donc juste un montage en mode suiveur (les résistances R2 et R6 ne font pas office de pont diviseur de tension) qui a pour caractéristique d'avoir une impédance d'entrée faible et une impédance de sortie forte ! (tout comme l'ampli op qui suis d'ailleurs)
Il est présent pour ne pas perturber le capteur. (à confirmer)
[quote"Astondb8"]Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère. [/quote]
Là, ça n'agit même pas comme un pont diviseur car la sortie de l'ampli op est soit 9V, soit 0V.
++
Black Templar
Un seul potentiomètre pour équilibrer les tensions permettrons de t'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit.[/quote]
Ah bon ?? tu es sur de toi ??
Pour moi, le potentiomètre sert seulement à définir un seuil de comparaison avec les tensions aux bornes + des ampli op !
Si tu veux t'assurer que les 2 moteurs avancent à la même vitesse, il faut 2 potentiomètres indépendants ! Là, si tu laisses un seul potar, tu ne peux pas compenser l'erreur comme il faut (même si dans ce montage, ça importe peu (voir pas ^^))
Il faudra que je me refasse une piqûre de rappel sur les transistors bipolaire, mais il me semble que ce montage est à collecteur commun. C'est donc juste un montage en mode suiveur (les résistances R2 et R6 ne font pas office de pont diviseur de tension) qui a pour caractéristique d'avoir une impédance d'entrée faible et une impédance de sortie forte ! (tout comme l'ampli op qui suis d'ailleurs)
Il est présent pour ne pas perturber le capteur. (à confirmer)
[quote"Astondb8"]Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère. [/quote]
Là, ça n'agit même pas comme un pont diviseur car la sortie de l'ampli op est soit 9V, soit 0V.
++
Black Templar

#11
Astondb8-RX
-
- Membres
-
- 295 messages
Habitué
Posté 25 mai 2011 - 05:15
Bonjour Black Templar,
Je me suis sans doute mal exprimé, mais ce qui est sur, c'est que mettre deux potentiomètres est inutile. En effet, l'un des deux Amplis Op est considéré comme référence et le potentiomètre sert à étalonner l'autre Ampli Op sur la même tension de comparaison non ?.
Cdlt
Yves
Je me suis sans doute mal exprimé, mais ce qui est sur, c'est que mettre deux potentiomètres est inutile. En effet, l'un des deux Amplis Op est considéré comme référence et le potentiomètre sert à étalonner l'autre Ampli Op sur la même tension de comparaison non ?.
Cdlt
Yves
#12
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 06:01
Oui, mais ce que je veux dire, c'est que les capteurs ne délivrent pas la même tension pour la même intensité lumineuse reçu ! Pour avoir le même comportement pour les deux capteurs, il est donc nécessaire de régler la sensibilité (et donc le seuil de comparaison) de chacun des capteurs séparément !
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)
#13
Astondb8-RX
-
- Membres
-
- 295 messages
Habitué
Posté 25 mai 2011 - 06:43
[quote"Black Templar"]Oui, mais ce que je veux dire, c'est que les capteurs ne délivrent pas la même tension pour la même intensité lumineuse reçu ! Pour avoir le même comportement pour les deux capteurs, il est donc nécessaire de régler la sensibilité (et donc le seuil de comparaison) de chacun des capteurs séparément !
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)[/quote]
Je suis d accord.
Mais je pense que le plus simple est de faire son "étalonnage" (comme préconisé dans les datasheets) de le faire sur un gris Kodak (30%) et de régler un capteur par rapport à l'autre pour qu'il compare la même tension.
Enfin, c'est comme cela que j'analyse la façon de faire...
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)[/quote]
Je suis d accord.
Mais je pense que le plus simple est de faire son "étalonnage" (comme préconisé dans les datasheets) de le faire sur un gris Kodak (30%) et de régler un capteur par rapport à l'autre pour qu'il compare la même tension.
Enfin, c'est comme cela que j'analyse la façon de faire...
#14
Hexa Emails
-

- Membres
-
- 439 messages
Habitué
- Gender:Male
Posté 25 mai 2011 - 08:09
au sujet des résistances entourées, elles sont utilisées pour alimenter les transistors, car ce ne sont pas pas AOP montés en comparateurs mais des comparateurs (tout court): le principe de fonctionnement est différent, ce n'est pas le même composant.
Mais sinon très bonnes explications, c'est très clair.
Mais sinon très bonnes explications, c'est très clair.
#15
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 mai 2011 - 08:18
[quote"MrAlexis44600"]au sujet des résistances entourées, elles sont utilisées pour alimenter les transistors, car ce ne sont pas pas AOP montés en comparateurs mais des comparateurs (tout court): le principe de fonctionnement est différent, ce n'est pas le même composant.[/quote]
Arg ! En effet, ce ne sont pas des ampli op ! (la boulette)
Merci pour l'explication de l'utilité des résistances en vert ! :)
[quote"MrAlexis44600"]Mais sinon très bonnes explications, c'est très clair.[/quote]
Ty :)
Arg ! En effet, ce ne sont pas des ampli op ! (la boulette)
Merci pour l'explication de l'utilité des résistances en vert ! :)
[quote"MrAlexis44600"]Mais sinon très bonnes explications, c'est très clair.[/quote]
Ty :)
#17
Astondb8-RX
-
- Membres
-
- 295 messages
Habitué
Posté 26 mai 2011 - 06:19
je n ai pas tout tres bien compris , avec les amplis OP,etc.. ????? :O :O :P
Pour info,
Un Ampli OP (Ampli Opérationnel) est un composant déjà assez ancien qui est toujours utilisé de nos jours malgré le numérique.
Pourquoi ? Tout simplement car avec un simple petit CI à 6 pattes (seuls 5 sont utiles) on arrive à faire une somme incroyable de choses différentes telles que :
Comparateur de tension (c'est de quoi nous parlions et l'utilisation la plus courante de ce composant)mais il fait aussi
Trigger
Multi-vibrateur astable
Additionner inverseur
Soustracteur différentiel
Intégrateur
Dérivateur
Montage logarithmique
Montage Exponentiel
Filtre passe bas
Filtre passe haut
Redresseur (sans seuil)
Détecteur de crêtes
Et il est possible que j'en oublis. J'ai dailleurs du aller sur Wiky pour me rappeler tout ce que l'on pouvait en faire.
En voyant cette liste et en sachant qu'il ne coute que quelques centimes d' il est facile de comprendre pourquoi il est tant utilisé. Il y a bien sur des boitiers qui en contiennent plusieurs afin de simplifier les montages.
A la base, il à été conçu pour comparer deux tensions.
Le plus célèbre d'entre eux, le LM741
Voilà si cela tintéresse, vas lire le lien Wiky que j'ai mis.
Cdlt
Yves
#18
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 26 mai 2011 - 06:27
[quote"Astondb8"]Et il est possible que j'en oublis.[/quote]
L'amplificateur, le suiveur, comparateur à hystérésis ?? :-°
Et puis en additionnant plusieurs ampli op, tu peux donc faire des montages encore plus complexes : oscillateurs rectangulaires, triangulaire, générateur de PWM, etc.
Bref, l'ampli op., c'est la vie :)
L'amplificateur, le suiveur, comparateur à hystérésis ?? :-°
Et puis en additionnant plusieurs ampli op, tu peux donc faire des montages encore plus complexes : oscillateurs rectangulaires, triangulaire, générateur de PWM, etc.
Bref, l'ampli op., c'est la vie :)
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users





{kind=link}