TOME 6Â : Les fichiers du TOME 6 sont ici.
Pour mÃĐmoire, l’ouvrage prÃĐcÃĐdent s’ÃĐtait achevÃĐ tragiquement sur la foudre qui est tombÃĐe inopinÃĐment sur le complexe de la NDRMSE provoquant une perte de donnÃĐe sur ZARIA le gros ordinateur qui hÃĐberge l’ensemble des fichiers produits sur les ordinateurs de la salle informatique S4. Pour couronner le tout, les systÃĻmes informatiques de traitement de texte ont sombrÃĐ dans une saturation matÃĐrielle qui a dÃĐfinitivement paralysÃĐ la rÃĐdaction des documents de suivi du projet, rÃĐunis dans ce que l’on nomme à la NDRMSE le TOME 5. Des mesures de sauvegarde sont heureusement rÃĐguliÃĻrement engagÃĐes, et malgrÃĐ ces alÃĐas frÃĐquents dans le monde de la technique, les personnels peuvent reprendre le travail comme si rien ne s’ÃĐtait passÃĐ. Les modules logiciels d’exploitation P21J_DÃĐmonstrateur_Raquette.ino associÃĐ Ã P22J_DÃĐmonstrateur_Sonde.ino ont ÃĐtÃĐ rÃĐimplantÃĐs sur les machines informatiques. La journÃĐe continue sereinement …
53) 11/01/2018 : Reprise des activitÃĐs à la NDRMSE (MJD 58129)
Revenant en salle informatique aprÃĻs avoir pris le repas de midi en compagnie des techniciens, je m’attendais à ce que les informaticiens planchent sur le pilotage manuel des moteurs, conformÃĐment au planning. Force est de constater que l’activitÃĐ actuelle de Ferrando sur son terminal ne semble avoir aucun rapport.
– Jour Max, vous ne travaillez pas sur la motorisation cet aprÃĻs midi ?
– Ben non, c’est Tassin qui s’en charge. Comme on galÃĻre trop sur les ÃĐchanges de donnÃĐes entre les pupitres et la sonde, on va appliquer une nouvelle stratÃĐgie. On modifie le contenu des ÃĐcrans de maÃŪtrise, ainsi l’opÃĐrateur aura sous les yeux aussi bien l’information relative à la consigne envoyÃĐe sur le canal montant que l’accusÃĐ de rÃĐception sur la voie descendante.
– Ha bon, la direction est au courant ?
– Naturellement, du reste c’est le Derlo qui nous l’a expressÃĐment demandÃĐ.
Changement de protocole d’exploitation de l’ÃĐcran OLED.
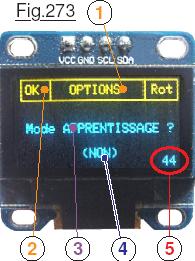
ConcrÃĻtement, ce changement de stratÃĐgie a ÃĐtÃĐ inspirÃĐ par la lourdeur d’avoir à se servir du moniteur de l’IDE pour surveiller les consignes envoyÃĐes par le pupitre vers la sonde. Il en a rÃĐsultÃĐ l’idÃĐe de faire afficher cette information sur l’ÃĐcran OLED, artifice d’autant plus justifiÃĐ qu’il consiste à n’ÃĐcrire au maximum que deux chiffres sur la matrice de pixels du petit ÃĐcran. Pas bien compliquÃĐ dans ces conditions de trouver un emplacement dans cette optique. Par ailleurs, sur le plan de la crÃĐdibilitÃĐ, cette procÃĐdure est parfaitement justifiÃĐe. Dans les stations de poursuite ou de gestion de satellites, les opÃĐrateurs ont des ÃĐcrans pour toutes les informations descendantes, mais ÃĐgalement vers celles qui sont envoyÃĐes aux lointains vaisseaux. La nouvelle rÃĐpartition des informations sur la surface utile est reprÃĐsentÃĐe sur la Fig.273 avec en haut à droite le petit cadre qui ne contiendra dÃĐsormais que Rot ou CLV. En 1 les titres des menus ont ÃĐtÃĐ rÃĐduits en largeur pour occuper moins de place : Les
caractÃĻres ‘<‘ et ‘>‘ ont ÃĐtÃĐ enlevÃĐs. Ainsi, sur la petite zone à gauche du cadre jaune en 2 seront affichÃĐs les accusÃĐs de rÃĐception. On retrouve en 3 l’information sur l’item des OPTIONS actuellement indexÃĐ dans la liste ÂŦ dÃĐroulante Âŧ. En 4, s’affiche ici de l’ÃĐtat de l’option. Le code 72 a ÃĐtÃĐ envoyÃĐ pour sortir du mode apprentissage. JEKERT à satisfait cette consigne et retournÃĐ OK. C’est prÃĐcisÃĐment l’accusÃĐ de rÃĐception qui reste prÃĐsent en 2. Puis le logiciel du pupitre à transmit la directive 44 affichÃĐe en 5. La sonde a alors retournÃĐ la donnÃĐe d’ÃĐtat du systÃĻme. Le programme ayant analysÃĐ cet ACR en a dÃĐduit qu’actuellement la sonde est hors mode apprentissage, et 4 reflÃĻte une rÃĐalitÃĐ physique effective.

Ajout du pilotage manuel des servomoteurs.
Ayant logÃĐ les textes dÃĐfinitifs en EEPROM, tÃĐlÃĐversez P21J_DÃĐmonstrateur_Raquette.ino sur la carte Arduino du pupitre et son associÃĐ P22J_DÃĐmonstrateur_Sonde.ino sur celle de la sonde. Nous allons, pour cette journÃĐe Julienne 58129 passer en revue les apports de la dÃĐfunte version H dont les octets reposent en paix dans les oubliettes du software. Les fonctions de base ÃĐtant en place, on commence par ajouter et tester le Pilotage MANUEL et individuel des divers servomoteurs de la petite machine. Pour mÃĐmoire les limites de consigne ne sont pas surveillÃĐes. Il faut par consÃĐquence ne pas aller chercher les valeurs qui engendrent une divergence des asservissements. Ãvitez soigneusement d’amener les mouvements trop vers les extrÃĐmitÃĐs des dÃĐbattements angulaires … et ne placez pas trop loin le bouton de panique. Pourvoir à tout moment se faire afficher les valeurs des consignes de la posture actuelle permet par comparaison avec celles de la Fiche n°10 de visualiser l’approche des zones de fonctionnement critiques. Quand on valide la fonction avec OUI, la LED rouge de ÂŦ motorisation en action Âŧ se met à clignoter. La 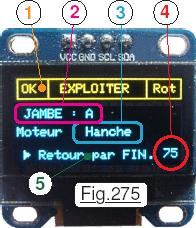 LED jaune de ÂŦ Sortie par FIN impÃĐrative Âŧ aussi. L’ÃĐcran de la Fig.275 s’affiche, mais surtout, il ne se passe rien sur les moteurs. Pourtant nous n’avons pris aucune prÃĐcaution de centrage du potentiomÃĻtre comme c’ÃĐtait le cas pour la version initiale du systÃĻme. L’avantage considÃĐrable d’un potentiomÃĻtre numÃĐrique, c’est de pouvoir l’initialiser à une valeur quelconque. Donc, chaque fois que l’on change de servomoteur, le programme va chercher sa valeur actuelle de consigne et la recopie dans la variable gÃĐrÃĐe par le codeur incrÃĐmental. L’ensemble des moteurs reste maintenant totalement inerte, seule l’action sur le codeur engendrera des mouvements. En 4 est indiquÃĐ le dernier code envoyÃĐ par la raquette avec en 1 l’accusÃĐ de rÃĐception. En 2 sera indiquÃĐ la Jambe sur laquelle on agit actuellement, et en 3 quel servomoteur est sollicitÃĐ. Vous pouvez aussi remarquer qu’en 5 la LED clignotante jaune est complÃĐtÃĐe par une directive visuelle du genre ÂŦ j’insiste lourdement ! Âŧ.
LED jaune de ÂŦ Sortie par FIN impÃĐrative Âŧ aussi. L’ÃĐcran de la Fig.275 s’affiche, mais surtout, il ne se passe rien sur les moteurs. Pourtant nous n’avons pris aucune prÃĐcaution de centrage du potentiomÃĻtre comme c’ÃĐtait le cas pour la version initiale du systÃĻme. L’avantage considÃĐrable d’un potentiomÃĻtre numÃĐrique, c’est de pouvoir l’initialiser à une valeur quelconque. Donc, chaque fois que l’on change de servomoteur, le programme va chercher sa valeur actuelle de consigne et la recopie dans la variable gÃĐrÃĐe par le codeur incrÃĐmental. L’ensemble des moteurs reste maintenant totalement inerte, seule l’action sur le codeur engendrera des mouvements. En 4 est indiquÃĐ le dernier code envoyÃĐ par la raquette avec en 1 l’accusÃĐ de rÃĐception. En 2 sera indiquÃĐ la Jambe sur laquelle on agit actuellement, et en 3 quel servomoteur est sollicitÃĐ. Vous pouvez aussi remarquer qu’en 5 la LED clignotante jaune est complÃĐtÃĐe par une directive visuelle du genre ÂŦ j’insiste lourdement ! Âŧ.
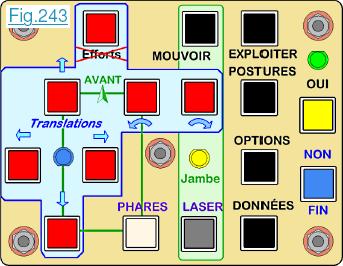
Pour des raisons d’agrÃĐment, dans ce mode le bouton central du capteur rotatif permet d’alterner entre des incrÃĐments angulaires importants ou faibles. Il est ainsi facile à tout moment d’adapter la finesse avec laquelle on engendre les mouvements individuels. Dans sa version ultime, le programme de la raquette de pilotage a considÃĐrablement ÃĐvoluÃĐ, et telles qu’elles ÃĐtait prÃĐsentÃĐes sur la Fig.243, la disposition des touches et des LEDs du clavier n’est plus idÃĐale. La Fig.276 propose un rÃĐamÃĐnagement envisagÃĐ actuellement pour amÃĐliorer la convivialitÃĐ opÃĐrationnelle.
Bien que toutes les LEDs actuellement gÃĐrÃĐes par l’ATmega328 ne sont pas regroupÃĐes sur le clavier, on note que la LED
{kind=link}
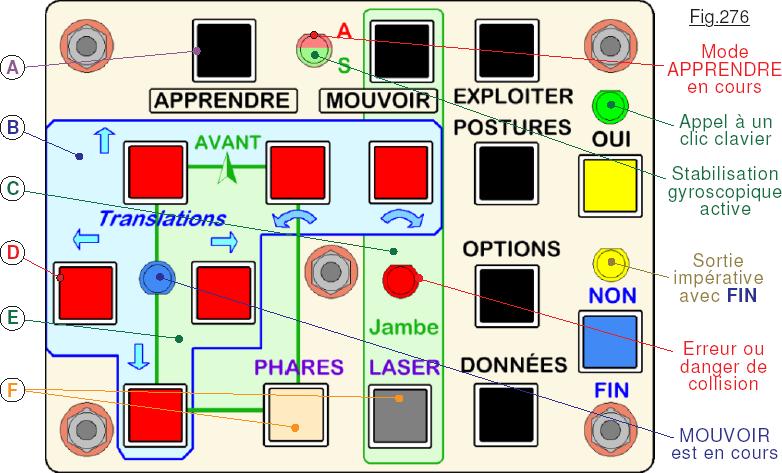 d’incitation à cliquer sur une touche est toujours voisine de la touche OUI mais de couleur verte. La diode jaune qui clignote pour sortir d’un mode impÃĐrativement par la touche FIN est maintenant juste au dessus de la touche concernÃĐe. Changement de stratÃĐgie qui sera effectif dans la version du logiciel qui traite de l’APPRENTISSAGE, un menu spÃĐcifique sera rÃĐservÃĐ Ã ce mode particulier d’exploitation de la sonde sur le terrain. En version ultime, APPRENTISSAGE a considÃĐrablement ÃĐvoluÃĐ, le nombre de ses options encombrerait exagÃĐrÃĐment le menu EXPLOITER. Aussi, on a abandonnÃĐ la touche dÃĐdiÃĐe à l’annulation des efforts,
d’incitation à cliquer sur une touche est toujours voisine de la touche OUI mais de couleur verte. La diode jaune qui clignote pour sortir d’un mode impÃĐrativement par la touche FIN est maintenant juste au dessus de la touche concernÃĐe. Changement de stratÃĐgie qui sera effectif dans la version du logiciel qui traite de l’APPRENTISSAGE, un menu spÃĐcifique sera rÃĐservÃĐ Ã ce mode particulier d’exploitation de la sonde sur le terrain. En version ultime, APPRENTISSAGE a considÃĐrablement ÃĐvoluÃĐ, le nombre de ses options encombrerait exagÃĐrÃĐment le menu EXPLOITER. Aussi, on a abandonnÃĐ la touche dÃĐdiÃĐe à l’annulation des efforts, 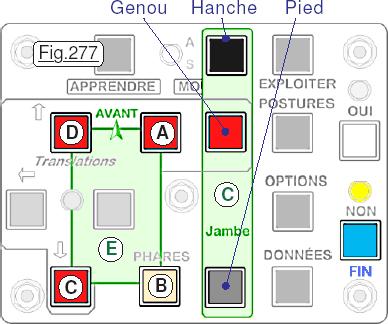 item qui fait alors partie des POSTURES. La touche A est donc devenue une fonction permanente au mÊme titre que les cinq autres touches fonctionnelles. Du coup la zone B relative aux mouvements n’encadre plus S10. Naturellement cette zone coloriÃĐe en bleu regroupe tous les boutons rouges tel que D, gÃĐnÃĐrant les dÃĐplacements ÃĐlÃĐmentaires. Quand on pilote un moteur en mode manuel, il devient ÃĐvident de savoir instinctivement sur quelle touche agir pour changer d’articulation. Dans ce but la sÃĐrigraphie comporte deux zones vertes C et E. Quand on est en mode pilotage manuel des servomoteurs, il faut oublier l’usage standard des diverses touche du clavier, seules celles coloriÃĐes sur la Fig.277 auront un effet. En particulier les deux boutons F n’agissent plus sur les phares et sur le LASER. La zone verticale C doit faire penser à une Jambe dont les boutons en partant du haut vers le bas reprÃĐsentent respectivement la Hanche, le Genou et le pivot du Pied.
item qui fait alors partie des POSTURES. La touche A est donc devenue une fonction permanente au mÊme titre que les cinq autres touches fonctionnelles. Du coup la zone B relative aux mouvements n’encadre plus S10. Naturellement cette zone coloriÃĐe en bleu regroupe tous les boutons rouges tel que D, gÃĐnÃĐrant les dÃĐplacements ÃĐlÃĐmentaires. Quand on pilote un moteur en mode manuel, il devient ÃĐvident de savoir instinctivement sur quelle touche agir pour changer d’articulation. Dans ce but la sÃĐrigraphie comporte deux zones vertes C et E. Quand on est en mode pilotage manuel des servomoteurs, il faut oublier l’usage standard des diverses touche du clavier, seules celles coloriÃĐes sur la Fig.277 auront un effet. En particulier les deux boutons F n’agissent plus sur les phares et sur le LASER. La zone verticale C doit faire penser à une Jambe dont les boutons en partant du haut vers le bas reprÃĐsentent respectivement la Hanche, le Genou et le pivot du Pied.
La zone rectangulaire E reprÃĐsente la sonde vue par dessus, les touches situÃĐes dans les angles symbolisant les Jambes. Dans cette symbolique, l’Avant de la petite machine est indiquÃĐe par la flÃĻche verte. Quand on dÃĐsire changer de servomoteur, on dÃĐsignera dans un ordre arbitraire l’articulation concernÃĐe et avec A, B, C ou D la Jambe sur laquelle on dÃĐsire agir.
 Lorsque l’on a abouti à une configuration intÃĐressante, on peut à tout moment sauvegarder les valeurs de la posture actuelle en EEPROM avec Sauver la POSTURE ? la commande dÃĐdiÃĐe qui suit l’ÃĐcriture en EEPROM la commande d’affichage d’un balayage panoramique tÃĐlÃĐmÃĐtrique. (Voir ÃĐventuellement la Fig.259 B) Il sera ainsi rapide et facile d’imposer cette configuration avec la commande de la Fig.278 en ÃĐtant bien conscient qu’une telle manipulation peut prÃĐsenter un danger pour la mÃĐcanique. Par exemple vous avez enregistrÃĐ la posture de dÃĐcollage. Puis, quelques temps plus tard, la sonde ÃĐtant posÃĐe au sol, vous croyez que la derniÃĻre sauvegarde concernait la posture Stable transversal. Passer d’une machine posÃĐe au sol à la rÃĐtractation vers le bas des Jambes ne sera absolument pas apprÃĐciÃĐ par la motorisation qui subira des efforts exagÃĐrÃĐs, sans compter les ÂŦ chaussettes Âŧ qui vont copieusement frotter sur le sol. Donc à utiliser cet item avec prudence.
Lorsque l’on a abouti à une configuration intÃĐressante, on peut à tout moment sauvegarder les valeurs de la posture actuelle en EEPROM avec Sauver la POSTURE ? la commande dÃĐdiÃĐe qui suit l’ÃĐcriture en EEPROM la commande d’affichage d’un balayage panoramique tÃĐlÃĐmÃĐtrique. (Voir ÃĐventuellement la Fig.259 B) Il sera ainsi rapide et facile d’imposer cette configuration avec la commande de la Fig.278 en ÃĐtant bien conscient qu’une telle manipulation peut prÃĐsenter un danger pour la mÃĐcanique. Par exemple vous avez enregistrÃĐ la posture de dÃĐcollage. Puis, quelques temps plus tard, la sonde ÃĐtant posÃĐe au sol, vous croyez que la derniÃĻre sauvegarde concernait la posture Stable transversal. Passer d’une machine posÃĐe au sol à la rÃĐtractation vers le bas des Jambes ne sera absolument pas apprÃĐciÃĐ par la motorisation qui subira des efforts exagÃĐrÃĐs, sans compter les ÂŦ chaussettes Âŧ qui vont copieusement frotter sur le sol. Donc à utiliser cet item avec prudence.

 Affichage des consignes d’une posture.
Affichage des consignes d’une posture.
ParticuliÃĻrement utile pour effectuer des analyses diverses, on peut par deux items du menu EXPLOITERÂ Â se faire
 afficher à convenance les douze consignes de motorisation correspondant soit à la configuration actuelle, soit à la posture sauvegardÃĐe en EEPROM. La premiÃĻre s’obtient avec la commande de la Fig.279 X alors que la posture logÃĐe en EEPROM sera listÃĐe par l’item Y.Â
Quand on valide avec la touche OUI on obtient un ÃĐcran comme celui reprÃĐsentÃĐ sur la Fig.280 et la LED jaune se met à clignoter annonçant 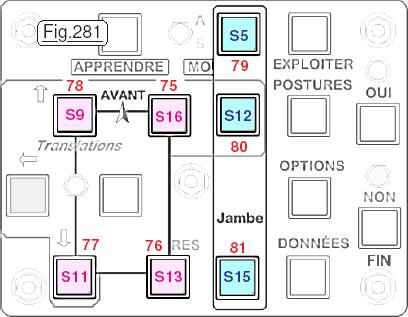 qu’il sera important de quitter par usage de la touche FIN. La copie d’ÃĐcran montre que les valeurs des consignes sont organisÃĐes sous forme d’une matrice dont les lignes sont concernÃĐes par les articulations et les colonnes sont reprÃĐsentatives des Jambes de l’insecte mÃĐcanique. Compte tenu de la rÃĐpartition des
qu’il sera important de quitter par usage de la touche FIN. La copie d’ÃĐcran montre que les valeurs des consignes sont organisÃĐes sous forme d’une matrice dont les lignes sont concernÃĐes par les articulations et les colonnes sont reprÃĐsentatives des Jambes de l’insecte mÃĐcanique. Compte tenu de la rÃĐpartition des
touches sur le clavier ergonomique, la Fig.281 situe la rÃĐfÃĐrence des divers boutons poussoir. En rouge le dessin est complÃĐtÃĐ pour chaque touche par la valeur du code consigne qui permet au logiciel de la Raquette de dialoguer avec celui de la sonde. Analysons la chaÃŪne logicielle qui anime les moteurs dans le mode manuel d’exploration sur le sol poussiÃĐreux.
La premiÃĻre instruction que reçoit la sonde est codÃĐe 73 et le switch case qui trie les ordres reçus se contente de forcer la variable Debattement à 12 pour gÃĐnÃĐrer par dÃĐfaut des amplitudes de mouvements importantes. Cette ligne d’instructions initialise l’identificateur Cible_Codeur_incremental à la valeur 5. Ce sÃĐlecteur chiffre signifie que le codeur incrÃĐmental concerne la motorisation en mode manuel. Par dÃĐfaut la raquette transmet aussi les consignes 75 et 79 pour forcer par dÃĐfaut la Jambe A et le servomoteur de la Hanche pour cible. Quand sur la raquette on clique sur l’une des touches coloriÃĐes en rose ou en bleu sur la Fig.281 la voie montante transmet l’instruction associÃĐe telle que 80 ou 77 notÃĐe en rouge à proximitÃĐ de chaque bouton poussoir sur le dessin. Le logiciel de la sonde change alors de servomoteur cible. Quand on clique sur le bouton central du codeur rotatif, la variable Debattement alterne entre 12 et 2 changeant les balayages angulaires entre ÂŦ grands Âŧ et ÂŦ petits Âŧ :
![]()
Les mouvements sont dÃĐclenchÃĐs par la rotation du codeur incrÃĐmental qui, en fonction du sens de rotation, fait envoyer à la sonde le code 40 ou le code 41 :
![]()
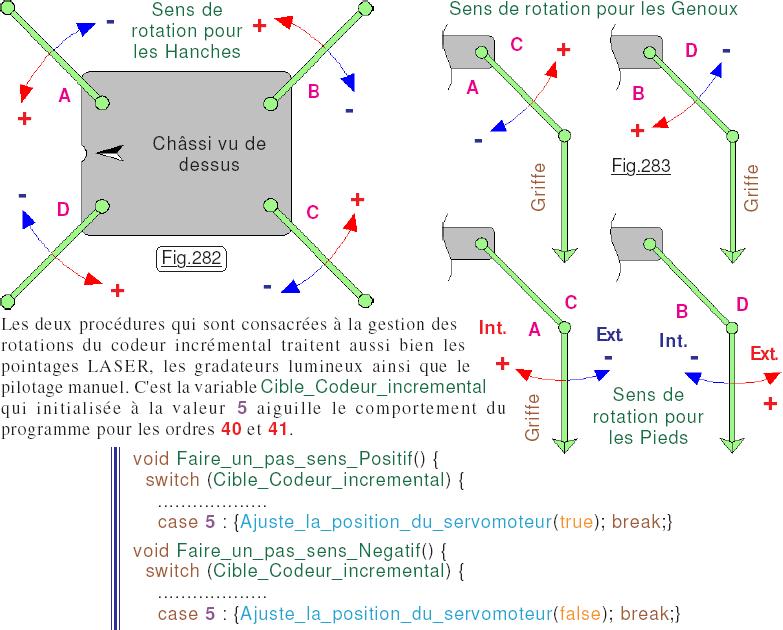
L’observation des listage partiels de ces procÃĐdures montre qu’en fin de compte une seule subroutine Ajuste_la_position_du_servomoteur(sens) rÃĐalise l’intÃĐgralitÃĐ des ÂŦ mouvements manuels Âŧ. Pour en saisir le fonctionnement, la Fig.282 prÃĐsente le comportement des servomoteurs des Hanches en fonction du signe de la consigne qu’ils doivent recevoir, alors que la Fig.283 rÃĐsume l’action des moteurs qui animent les Griffe. Cette procÃĐdure optimisÃĐe se rÃĐsume à peu de chose :
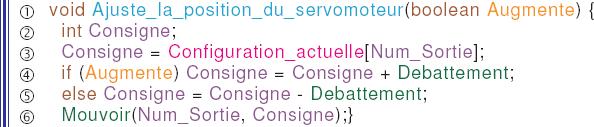 La variable locale Augmente passÃĐe en paramÃĻtre sous la forme d’un boolÃĐen à la procÃĐdure en (1) prÃĐcise si la valeur de Consigne doit augmenter ou diminuer. En (2) on dÃĐclare en local Consigne pour ne pas interfÃĐrer sur les variables globales. L’instruction (3) rÃĐcupÃĻre la valeur actuelle de configuration du servomoteur cible. En fonction du sens de rotation dÃĐsirÃĐ, les lignes (4) et (5) ajustent la valeur de Consigne pour la nouvelle position angulaire à adopter. Enfin, en (6), si les moteurs ne sont pas sur OFF, la procÃĐdure Mouvoir transmet la Consigne au multiplexeur et met à jour le tableau Configuration_actuelle[Num_Sortie].
La variable locale Augmente passÃĐe en paramÃĻtre sous la forme d’un boolÃĐen à la procÃĐdure en (1) prÃĐcise si la valeur de Consigne doit augmenter ou diminuer. En (2) on dÃĐclare en local Consigne pour ne pas interfÃĐrer sur les variables globales. L’instruction (3) rÃĐcupÃĻre la valeur actuelle de configuration du servomoteur cible. En fonction du sens de rotation dÃĐsirÃĐ, les lignes (4) et (5) ajustent la valeur de Consigne pour la nouvelle position angulaire à adopter. Enfin, en (6), si les moteurs ne sont pas sur OFF, la procÃĐdure Mouvoir transmet la Consigne au multiplexeur et met à jour le tableau Configuration_actuelle[Num_Sortie].
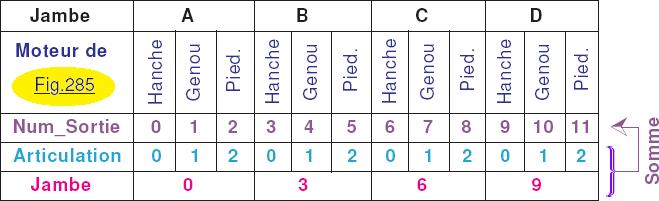
Notez au passage que ce sont les ordres compris entre 75 et 81 qui initialisent la variable Num_Sortie. La valeur affectÃĐe à Num_Sortie est obtenue par une ÂŦ astuce de programmation Âŧ en vue d’optimiser le code. Comme on peut le constater sur le listage de la Fig.284 chaque code reçu pour changer de cible modifie le contenu des 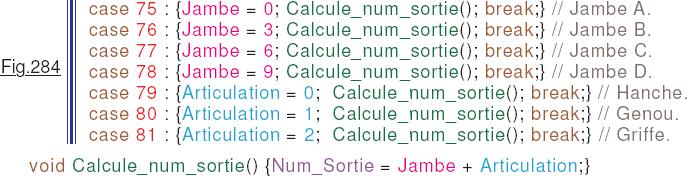 deux variables dÃĐdiÃĐes Jambe et Articulation. Pour en dÃĐduire la valeur du moteur concernÃĐ et de Num_Sortie associÃĐ du multiplexeur, le calcu dans la subroutine Calcule_num_sortie devient ÃĐlÃĐmentaire. Cette technique est infiniment plus ÃĐconome en taille de programme que si le traitement s’ÃĐtait orientÃĐ de maniÃĻre ÂŦ banale Âŧ vers un switch case ou une batterie de test de type if. Le petit tableau de la Fig.285 rÃĐsume ces traitements.
deux variables dÃĐdiÃĐes Jambe et Articulation. Pour en dÃĐduire la valeur du moteur concernÃĐ et de Num_Sortie associÃĐ du multiplexeur, le calcu dans la subroutine Calcule_num_sortie devient ÃĐlÃĐmentaire. Cette technique est infiniment plus ÃĐconome en taille de programme que si le traitement s’ÃĐtait orientÃĐ de maniÃĻre ÂŦ banale Âŧ vers un switch case ou une batterie de test de type if. Le petit tableau de la Fig.285 rÃĐsume ces traitements.
Simulation de tirs au LASER.
ExpÃĐrience scientifique qui a ÃĐtÃĐ mise au point par nos chercheurs et nos techniciens toulousains, cette technologie (Cocorico !) a ÃĐtÃĐ sÃĐlectionnÃĐe par les AmÃĐricains pour se voir embarquer à bord du plus gros ÂŦ rover Âŧ posÃĐ sur Mars : L’explorateur Curiosity, une machine absolument hors du commun. Le fondement de cette manipulation consistait à bombarder un rocher avec un laser trÃĻs puissant pour faire fondre le matÃĐriau. L’analyse spectrale de la couleur des gaz qui en rÃĐsulte permet aux savants d’en dÃĐduire une foule d’informations relatives à la planÃĻte rouge. La petite simulation prÃĐsentÃĐe ici consiste à rÃĐaliser une rafale d’ÃĐclairs de quelques secondes à la puissance maximale quelle que soit l’ÃĐtat actuel du LASER. Seule limite à cette action : Le systÃĻme ÃĐlectrique de bord ne peut en aucun cas passer outre le disjoncteur s’il est dÃĐclenchÃĐ. Dans ce cas il n’y aura aucun effet mis à part l’accusÃĐ de rÃĐception OK qui termine l’action issue de l’instruction ayant pour code 9.
Pas besoin de se torturer les mÃĐninges pour comprendre que c’est l’item de la Fig.286 qui permet de dÃĐclencher un tir LASER.
ATTENTION : Le ÂŦ rayon de la mort Âŧ sera ÃĐmis inconditionnellement et sans aucune vÃĐrification, y compris si le LASER est actuellement ÃĐteint ou à un niveau ÃĐnergÃĐtique minimal de 1. N’activez cette fonction avec la touche OUI que si la direction du canon à photons est dirigÃĐe loin du regard de toute personne prÃĐsente dans le local.
Sur la sonde, la procÃĐdure invoquÃĐe pour rÃĐaliser cette action est du genre presque dÃĐrisoire :

En (1) on organise une boucle qui va faire 35 fois la sÃĐquence (2) : Allumer le LASER à 254 le maximum, durant 25 millisecondes. Puis l’ÃĐteindre durant 50 millisecondes. ConcrÃĻtement on ne l’ÃĐteint pas complÃĻtement, car le code gÃĐnÃĐrÃĐ est plus compact si on se contente de ramener la valeur à 1. Cette mÃĐthode est induite par le fait que la sortie binaire nommÃĐ LASER fonctionne en P.W.M. Tout compris, elle n’augmente la taille du programme de la sonde que de 40 octets.
Avec cette description nous en avons terminÃĐ la liste des apports qui ÃĐtaient le fait de la version H des deux programmes. Nous allons pouvoir passer en revue les complÃĐments qui ÃĐmanent de la version J actuellement dans les mÃĐandres binaires des deux microcontrÃīleurs.
La suite est ici.