Je sais que Lynxmotion vends des servomoteurs et fournit la modelisation en CAO mais je ne sais pas avec quels logiciels c'est compatible :
http://www.lynxmotion.com/s-5-ses-3d-models.aspx
Contenu de Jbot
Il y a 768 élément(s) pour Jbot (recherche limitée depuis 29-mai 13)
Par type de contenu
Voir pour ce membre
#18153 Image CAO Servomoteurs
 Posté par
sur 28 septembre 2010 - 02:19
dans
Archives
Posté par
sur 28 septembre 2010 - 02:19
dans
Archives
#18148 Capteur IR et SSC 32
Posté par
sur 28 septembre 2010 - 12:24
dans
Electronique
Salut,
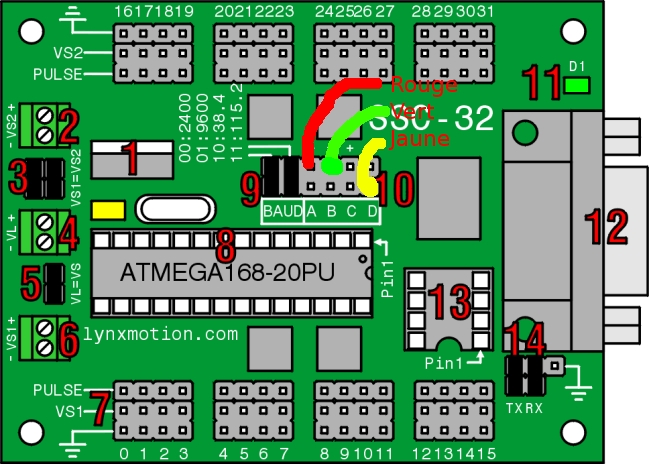
Deja ton capteur sort un signal numérique " The Infrared Reflectance Sensor Module simply gives a digital signal when it detects infrared reflection" donc le mettre sur une entrée analogique n'a que peu d'intéret, mais bon tu peux le faire quand meme c'est juste que tu vas lire soit une valeur assez grande (autour de 5V) soit une valeur petite (autour de 0V).
Je t'ai mis le schema de ce que tu dois connecter.
A bientot.
Jo
Deja ton capteur sort un signal numérique " The Infrared Reflectance Sensor Module simply gives a digital signal when it detects infrared reflection" donc le mettre sur une entrée analogique n'a que peu d'intéret, mais bon tu peux le faire quand meme c'est juste que tu vas lire soit une valeur assez grande (autour de 5V) soit une valeur petite (autour de 0V).
Je t'ai mis le schema de ce que tu dois connecter.
A bientot.
Jo
Image(s) jointe(s)
#18087 A la recherche du capteur introuvable...
Posté par
sur 25 septembre 2010 - 05:29
dans
Electronique
Tu peux utiliser un capteur laser qui tourne en permanence pour avoir une vision globale. PAr contre si l'objet que tu dois capter bouge selon les X Y et Z, la ca va pas etre possible du coup ^^
#18066 aide realisation d'un robot autonome
Posté par
sur 23 septembre 2010 - 12:29
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour faire ce projet a pas cher (et pas trés précis du coup mais tu as une marge de 40cm quand meme donc ca devrait aller je pense) tu peux faire :
1 microcontrolleur Atmel (2 euros)
1 quartz et 2 capas (2 euros)
2 servos moteurs (15/20 euros les deux) modifiés pour qu'ils tournent en continu (0 euros)
1 pile ou batterie de 5V si c'est possible
1 platine de test (Pas grand chose)
Aprés t'as juste a écrire un code qui va faire avancer les 2 roues, fait un wait de X secondes (a calibrer plein de fois pour s'approcher le plus possible de 4.8 metres) et s'arreter de tourner.
Aprés il y a peut etre la possibilité de rajouter des encodeurs à pas cher, je ne sais pas si des encodeurs low-cost existent
Avec cette base t'en as deja pour 30 euros en gros je pense :s
1 microcontrolleur Atmel (2 euros)
1 quartz et 2 capas (2 euros)
2 servos moteurs (15/20 euros les deux) modifiés pour qu'ils tournent en continu (0 euros)
1 pile ou batterie de 5V si c'est possible
1 platine de test (Pas grand chose)
Aprés t'as juste a écrire un code qui va faire avancer les 2 roues, fait un wait de X secondes (a calibrer plein de fois pour s'approcher le plus possible de 4.8 metres) et s'arreter de tourner.
Aprés il y a peut etre la possibilité de rajouter des encodeurs à pas cher, je ne sais pas si des encodeurs low-cost existent
Avec cette base t'en as deja pour 30 euros en gros je pense :s
#18028 branchement électrique
Posté par
sur 21 septembre 2010 - 12:37
dans
Electronique
Le choix de ta carte va dépendre de ce dont tu as besoin. 4 entrées analogiques ne te suffisent pas apparemment, donc est ce que 6 (arduino Romeo) va etre suffisant ? Si ce n'est pas suffisant il faut carement aller a l'arduinoMega qui en a 16 (Avec ca tu peux mettre des capteurs IR dans tous les sens  ).
).
Aprés l'avantage de l'arduinoMega (En plus de toutes ses IOs) c'est qu'il y a 4 Uart, donc tu peux en mettre 1 pour etre pilotée par le PC, un autre lien pour piloter la SSC32 et il te reste 2 liens pour piloter ce que tu veux (1 lien pour piloter les moteurs brushless par exemple et 1 lien pour lire un capteur quelconque).
).Aprés l'avantage de l'arduinoMega (En plus de toutes ses IOs) c'est qu'il y a 4 Uart, donc tu peux en mettre 1 pour etre pilotée par le PC, un autre lien pour piloter la SSC32 et il te reste 2 liens pour piloter ce que tu veux (1 lien pour piloter les moteurs brushless par exemple et 1 lien pour lire un capteur quelconque).
#18024 Lanceur de billes (type airsoft)
Posté par
sur 21 septembre 2010 - 08:23
dans
Mécanique
Sur mon hexapode j'avais mis un lanceur de bille a une époque :
http://kriegel.joffrey.free.fr/?p=60
En fait c'est le canon d'un modele reduit de tank rc qui lançait des billes.
Je ne sais plus la référence exacte mais c'etait ce genre : http://www.toyeast.com/v3/pdtdetail.asp?pdt_id=A03102501
Je ne sais pas trop quelles dimensions tu cherches mais ca pourrait faire l'affaire je pense. Par contre il n'y a pas une grosse cadence de tir, on va dire une bille par seconde.
http://kriegel.joffrey.free.fr/?p=60
En fait c'est le canon d'un modele reduit de tank rc qui lançait des billes.
Je ne sais plus la référence exacte mais c'etait ce genre : http://www.toyeast.com/v3/pdtdetail.asp?pdt_id=A03102501
Je ne sais pas trop quelles dimensions tu cherches mais ca pourrait faire l'affaire je pense. Par contre il n'y a pas une grosse cadence de tir, on va dire une bille par seconde.
#18023 branchement électrique
Posté par
sur 21 septembre 2010 - 08:18
dans
Electronique
Non, tu ne peux pas brancher de capteur IR sur les sorties servos ^^
Comme je l'ai dis, la SSC32 n'est qu'un esclave, tu utilises quoi pour la piloter ? ton pc ? ou une carte embarquée type Atmel, Pic, Arduino, BasicMicro ?
Pour avoir plus d'entrées analogiques il faut soit que tu rajoute un petit microcontroleur en plus qui ait des entrée analog, soit que tu utilise ton controleurs si tu en as deja un et que tu utilises ses entrées analog.
Comme je l'ai dis, la SSC32 n'est qu'un esclave, tu utilises quoi pour la piloter ? ton pc ? ou une carte embarquée type Atmel, Pic, Arduino, BasicMicro ?
Pour avoir plus d'entrées analogiques il faut soit que tu rajoute un petit microcontroleur en plus qui ait des entrée analog, soit que tu utilise ton controleurs si tu en as deja un et que tu utilises ses entrées analog.
#18019 branchement électrique
Posté par
sur 21 septembre 2010 - 06:32
dans
Electronique
Tu peux utiliser la SSC32 avec n'importe quel logiciel / materiel qui sache communiquer par une liaison série. La carte SSC32 est juste une carte esclave donc elle recoit des commandes en série et les exécute.
Tu peux brancher les capteurs IR analogiques sur les entrées analogiques en effet mais tu n'en as que 4.
Si tu n'as pas besoin de beaucoup de servomoteurs (moins que 10 je dirais), il vaut peut etre mieux prendre l'arduino.
Tu peux brancher les capteurs IR analogiques sur les entrées analogiques en effet mais tu n'en as que 4.
Si tu n'as pas besoin de beaucoup de servomoteurs (moins que 10 je dirais), il vaut peut etre mieux prendre l'arduino.
#24733 La meilleure façon de modifier des servos ?
Posté par
sur 07 septembre 2010 - 08:25
dans
Mécanique
Ha sisi, les moteurs pas à pas sont totalement utilisable comme motorisation pour un robot (tant qu'il fait pas 100Kg :p).
Au concours Eurobot y a pas mal d'équipes qui en utilisent pour faire avancer leur robot car tu connais relativement bien la position de ton robot avec ca (en général les robots font entre 5 et 10Kg).
Au concours Eurobot y a pas mal d'équipes qui en utilisent pour faire avancer leur robot car tu connais relativement bien la position de ton robot avec ca (en général les robots font entre 5 et 10Kg).
#17760 abdomen pour hexapode
Posté par
sur 23 août 2010 - 10:39
dans
Mécanique
En effet, c'est moi l'auteur de cette photo
Pour le moment j'ai fixé l'abdomen directement sur le corps avec une "tige" donc ce n'est pas génial mais il peut facilement se fixer avec un servomoteur.
Au bout de l'abdomen il y a cette partie mécanique http://www.lynxmotion.com/p-421-square-4-sided-aluminum-hub-connector.aspx donc tu peux facilement visser quelque chose de n'importe quel coté.
Sur cette vidéo à la 7-8eme seconde, on voit a peu prés comment est fixé l'abdomen. Ce n'est que du temporaire, il faudrait quelque chose de plus solide car ce que j'ai mis pour l'attacher pour le moment est un peu flexible.
Pour le moment j'ai fixé l'abdomen directement sur le corps avec une "tige" donc ce n'est pas génial mais il peut facilement se fixer avec un servomoteur.
Au bout de l'abdomen il y a cette partie mécanique http://www.lynxmotion.com/p-421-square-4-sided-aluminum-hub-connector.aspx donc tu peux facilement visser quelque chose de n'importe quel coté.
Sur cette vidéo à la 7-8eme seconde, on voit a peu prés comment est fixé l'abdomen. Ce n'est que du temporaire, il faudrait quelque chose de plus solide car ce que j'ai mis pour l'attacher pour le moment est un peu flexible.
#17754 Bonjour les passionnés !
Posté par
sur 18 août 2010 - 07:37
dans
Et si vous vous présentiez?
Bonjour à tous !
Je viens de découvrir ce forum donc je me suis inscris
Voici du coup une petite description de moi (ça fait un peu narcissique tout de même... )
Je m'appelle Joffrey, j'ai 25 et j'habite à Paris. J'ai fais une école d'électronique embarqués et je fais actuellement une thèse sur la consommation des processeurs.
Je suis bien évidement passionné par la robotique, le monde du logiciel libre et la musique (je fais de la basse, enfin quand j'ai le temps ).
Je possède actuellement un hexapode nommé Téméraire, et je suis en train de construire un robot avec 2 roues et retour de position et tout le tralala pour peut être participer à la prochaine coupe de France de robotique (Eurobot) si j'ai le temps de faire ce robot... (Pas forcement simple tout seul en partant de 0 :s)
Ce que j'aime surtout dans la robotique c'est l'électronique et la programmation, j'ai horreur de la mécanique par contre >_<
Voila une brève présentation de moi, vous pouvez voir mes robots sur mon site : http://kriegel.joffrey.free.fr/
Je pense que je ne tarderais pas à poser des questions sur l'asservissement d'un robot roulant
A bientot !
Jo
Je viens de découvrir ce forum donc je me suis inscris
Voici du coup une petite description de moi (ça fait un peu narcissique tout de même...
)Je m'appelle Joffrey, j'ai 25 et j'habite à Paris. J'ai fais une école d'électronique embarqués et je fais actuellement une thèse sur la consommation des processeurs.
Je suis bien évidement passionné par la robotique, le monde du logiciel libre et la musique (je fais de la basse, enfin quand j'ai le temps
).Je possède actuellement un hexapode nommé Téméraire, et je suis en train de construire un robot avec 2 roues et retour de position et tout le tralala pour peut être participer à la prochaine coupe de France de robotique (Eurobot) si j'ai le temps de faire ce robot... (Pas forcement simple tout seul en partant de 0 :s)
Ce que j'aime surtout dans la robotique c'est l'électronique et la programmation, j'ai horreur de la mécanique par contre >_<
Voila une brève présentation de moi, vous pouvez voir mes robots sur mon site : http://kriegel.joffrey.free.fr/
Je pense que je ne tarderais pas à poser des questions sur l'asservissement d'un robot roulant
A bientot !
Jo
#17753 abdomen pour hexapode
Posté par
sur 18 août 2010 - 07:29
dans
Mécanique
Tiens, cette image me rappelle quelque chose
#30704 pont en H et perte de puissance
Posté par
sur 06 août 2010 - 09:30
dans
Electronique
[quote"Philippe"] MLI [/quote] Beurk :p
#30698 pont en H et perte de puissance
Posté par
sur 06 août 2010 - 09:14
dans
Electronique
C'est étrange étant donné que le pont en H est justement fait pour garantir de la puissance a ton moteur quel que soit sa vitesse.
Quel pont en H utilises tu ?
Et a quelle fréquence envoies tu ton PWM dessus ?
Quel pont en H utilises tu ?
Et a quelle fréquence envoies tu ton PWM dessus ?
#25929 Gamma 1 506
Posté par
sur 13 juillet 2010 - 08:40
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pas mal du tout ! Bravo ! ^^
#26504 [Hexapode] Téméraire
Posté par
sur 16 juin 2010 - 11:08
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci pour vos encouragements ^^
Petite mise à jour, je viens de finir de mettre les nouvelles pattes et j'ai fais les premiers tests du code d'adaptation au terrain et ça ne fonctionne pas trop mal (Bon ok on pourrait faire largement mieux :D ) :
http://smartrobotics.org/blog/fr/blog/2010/06/16/complete-terrain-adaptation-with-hexapod/
Petite mise à jour, je viens de finir de mettre les nouvelles pattes et j'ai fais les premiers tests du code d'adaptation au terrain et ça ne fonctionne pas trop mal (Bon ok on pourrait faire largement mieux :D ) :
http://smartrobotics.org/blog/fr/blog/2010/06/16/complete-terrain-adaptation-with-hexapod/
#26499 [Hexapode] Téméraire
Posté par
sur 16 juin 2010 - 06:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à tous,
Passionné de robotique depuis quelques années, je m'amuse a créer de petits robots, tester des choses etc...
Je vais vous présenter ici le robot sur lequel je travail pour le moment.
C'est une hexapode que j'ai nommé Téméraire.
Il possède donc 6 pattes, un processeur Gumstix Overo avec Wifi et Bluetooth intégrés, une webcam, un haut parleur(avec de la synthèse vocale), et peut être plus tard un micro (il doit y en avoir un dans la webcam mais je ne sais pas si il marche).
Voici un petit aperçu de ce à quoi il ressemblait il y a encore 3 mois :D

Depuis j'ai fais quelques modifications, je lui ajouté une tête et des mandibules pour pouvoir attraper des objets et je suis en train de lui installer des nouvelles pattes avec des capteurs au bout pour qu'il puisse marcher en s'adaptant au terrain.
Voila, si ca vous intéresse il y a pas mal de vidéos sur mon site : http://smartrobotics.org/blog/fr
Passionné de robotique depuis quelques années, je m'amuse a créer de petits robots, tester des choses etc...
Je vais vous présenter ici le robot sur lequel je travail pour le moment.
C'est une hexapode que j'ai nommé Téméraire.
Il possède donc 6 pattes, un processeur Gumstix Overo avec Wifi et Bluetooth intégrés, une webcam, un haut parleur(avec de la synthèse vocale), et peut être plus tard un micro (il doit y en avoir un dans la webcam mais je ne sais pas si il marche).
Voici un petit aperçu de ce à quoi il ressemblait il y a encore 3 mois :D
Depuis j'ai fais quelques modifications, je lui ajouté une tête et des mandibules pour pouvoir attraper des objets et je suis en train de lui installer des nouvelles pattes avec des capteurs au bout pour qu'il puisse marcher en s'adaptant au terrain.
Voila, si ca vous intéresse il y a pas mal de vidéos sur mon site : http://smartrobotics.org/blog/fr
#23431 [Présentation] Joffrey
Posté par
sur 16 juin 2010 - 06:03
dans
Et si vous vous présentiez?
Bonjour,
Bon, je vais copier la présentation que j'avais fait sur le forum de Caliban :p
Comment vous appelez vous ?
Joffrey
Quel est votre age ?
25 ans
Où habitez vous ?
Paris
Quelle profession exercez vous ?
J'effectue une thèse sur la consommation d'énergie des systèmes embarqués multicoeur. (Donc plus ou moins de l'électronique et du software bas niveau :p)
possédez vous un ou des Robots (si oui, de quel type et lesquels) ?
Oui, un hexapode que vous pouvez voir sur mon site : http://kriegel.joffrey.free.fr/?cat=5
Je m'étais aussi amusé a faire un petit robot roulant a une époque, mais je ne l'utilise plus.
Quelles sont vos passions ?
La robotique, jouer de la basse.
Qu'est ce que la robotique pour vous ?
Une passion depuis 5 ans, lorsque j'ai participé a la coupe de France de robotique avec mon école. Depuis j'essaie, quand le temps me le permet, de faire des robots et tester des programmes.
Comment voyez vous la robotique dans l'avenir ?
Dans l'avenir la robotique occupera une part importante dans la vie. Que ce soit par les robots cuisiniers ou autre choses du genre, ou alors les drones (et surement futur robots) militaires et même l'exploration spatiale passera forcement par des robots évolués qui succèderont au rover.
Bon, je vais copier la présentation que j'avais fait sur le forum de Caliban :p
Comment vous appelez vous ?
Joffrey
Quel est votre age ?
25 ans
Où habitez vous ?
Paris
Quelle profession exercez vous ?
J'effectue une thèse sur la consommation d'énergie des systèmes embarqués multicoeur. (Donc plus ou moins de l'électronique et du software bas niveau :p)
possédez vous un ou des Robots (si oui, de quel type et lesquels) ?
Oui, un hexapode que vous pouvez voir sur mon site : http://kriegel.joffrey.free.fr/?cat=5
Je m'étais aussi amusé a faire un petit robot roulant a une époque, mais je ne l'utilise plus.
Quelles sont vos passions ?
La robotique, jouer de la basse.
Qu'est ce que la robotique pour vous ?
Une passion depuis 5 ans, lorsque j'ai participé a la coupe de France de robotique avec mon école. Depuis j'essaie, quand le temps me le permet, de faire des robots et tester des programmes.
Comment voyez vous la robotique dans l'avenir ?
Dans l'avenir la robotique occupera une part importante dans la vie. Que ce soit par les robots cuisiniers ou autre choses du genre, ou alors les drones (et surement futur robots) militaires et même l'exploration spatiale passera forcement par des robots évolués qui succèderont au rover.




