Posté par
Posté par
thanks for your wonderful solution.
Well, I don't think this all this are so good.
If so, I will use it since a long time ago.
I will find some videos about different parallel linkages.
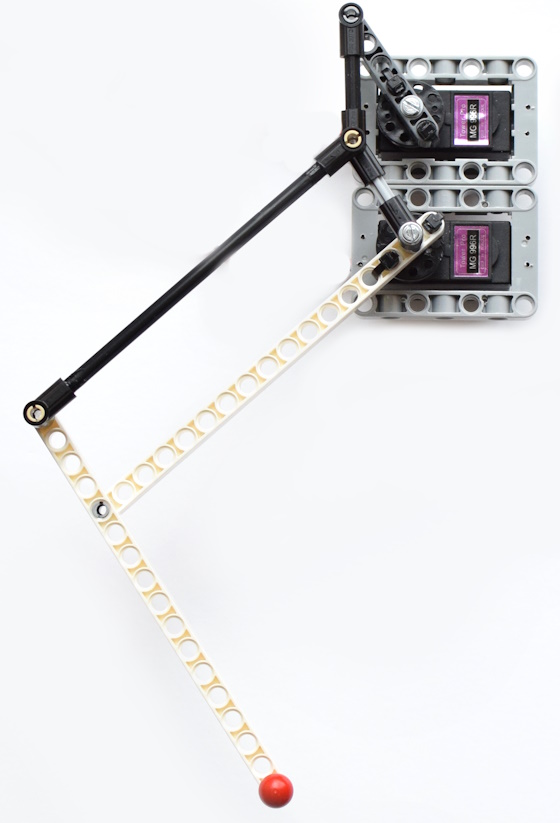
To find the good arms position, you must go to point x=0, y=0. This is the ligne on the setup() : IK( 0, 0, LS, RS); // initialyse the paw to position x=0 and y=0
Then you position the arms as you want.