Posté par
Posté par
La communication se fais en texte via un socket en C. J'envois mes commandes sur la sortie standards (on bosse sur un environnement UNIX) et j'ai un retour en texte aussi sur l'entrée standards (que je dois parser pour récup les informations de contrôle).
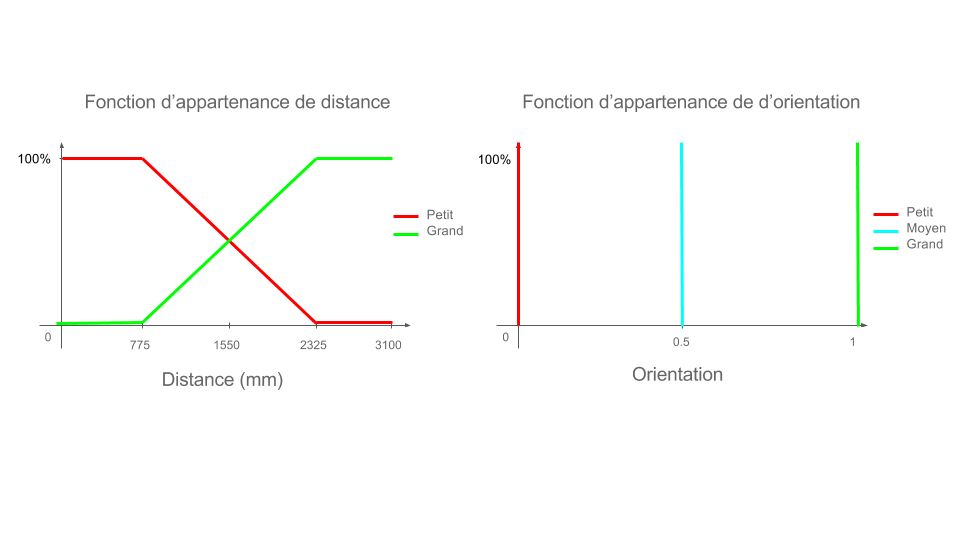
De ce que je me rappelle de la logique floue c'est un système de prise de décision basés sur des probabilités. Ca donnerais un truc comme ca dans mon cas SI capteur_droit SUPERIEUR A capteur_gauche ET QUE capteur_avant INFERIEUR A un_seuil ALORS on se trouve surement dans un virage vers la droite. C'est ca ?
J'ai regardé aussi le réseau de neurone, ça à l'aire cool, mais de ce que j'ai compris, pour que ca marche, il faut naviguer plusieurs fois dans le circuit pour l'analyser et on aura le droit qu'à un essais le jour de la présentation (sur un circuit inconnu qui plus est) :/
Je ne passe pas par matlab, tout se fais via le socket :/
Je suis en première années à Epitech, et cette école est justement connu pour ne pas guider les étudiants pour les pousser à chercher par eux même