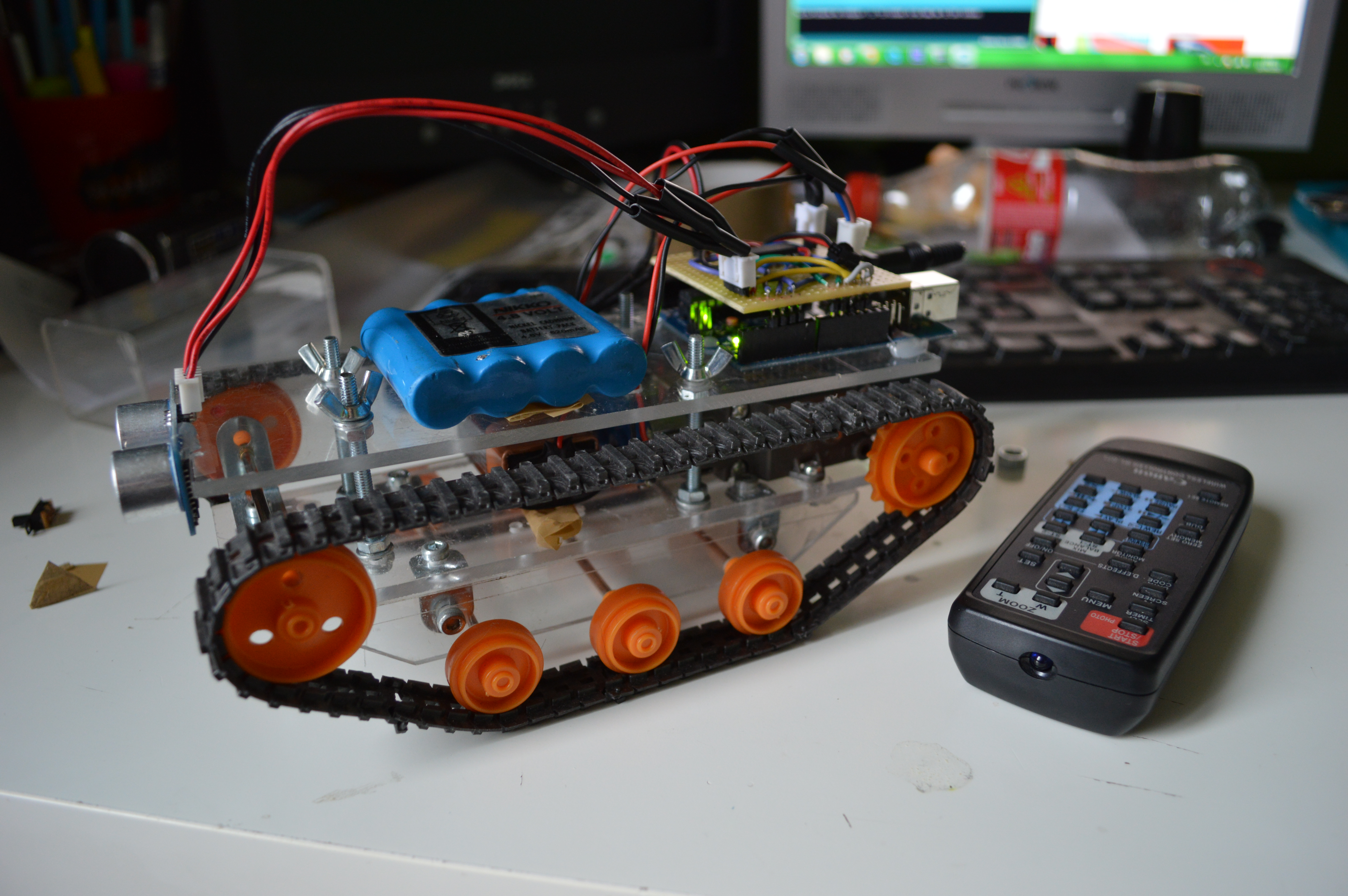
Le voici :

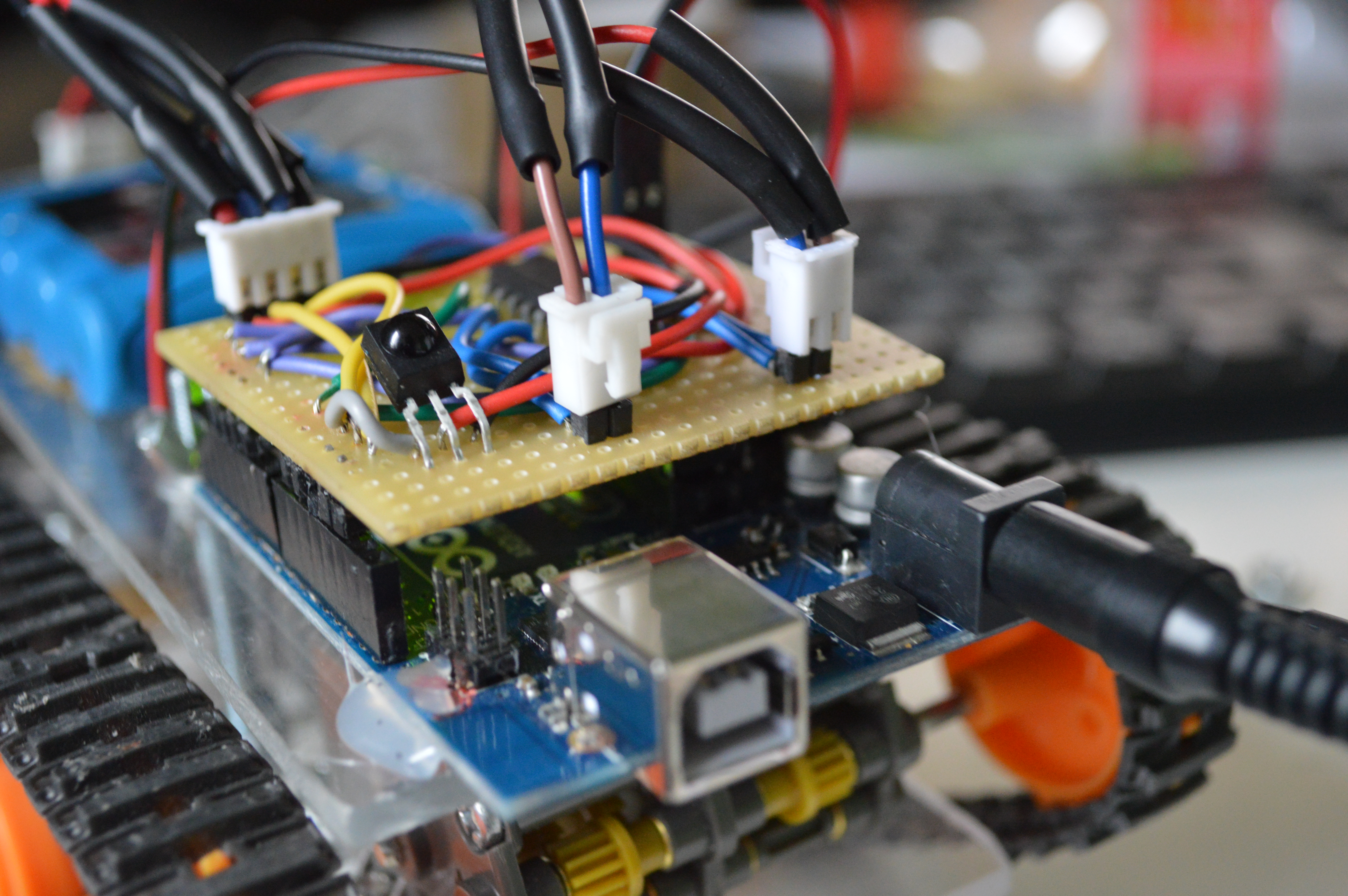
Et j'ai aussi commencé la carte :
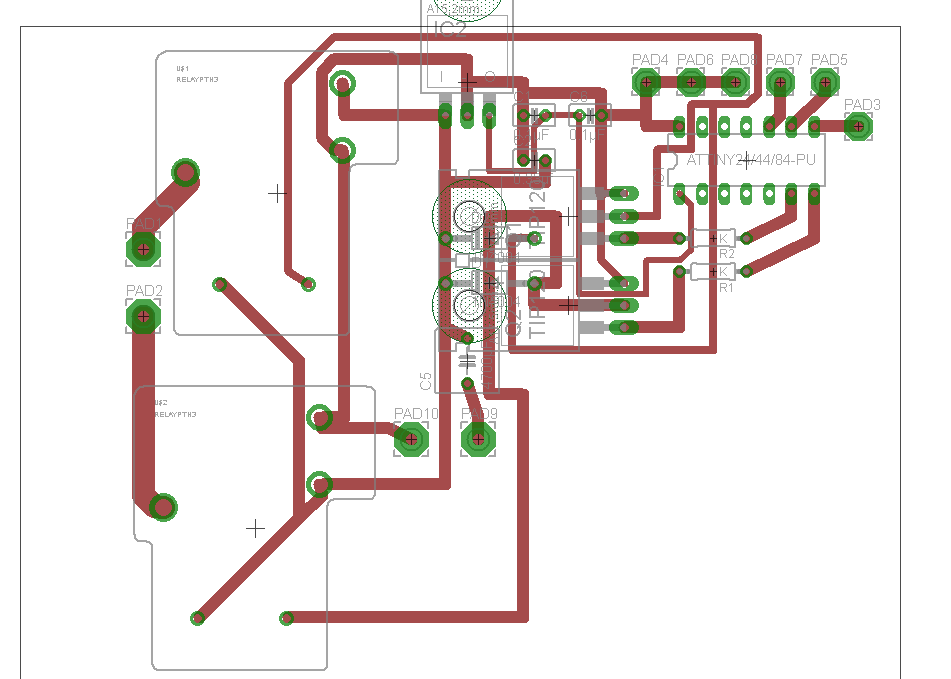
Le schema vous parait t il bon ?
Je vais essayer de faire le dernier composants pour finir le schema/carte.
Merci
Il y a 485 élément(s) pour Newbies (recherche limitée depuis 23-juin 13)
 Posté par
sur 09 octobre 2013 - 04:50
dans
Electronique
Posté par
sur 09 octobre 2013 - 04:50
dans
Electronique
Posté par
sur 03 octobre 2013 - 09:39
dans
Electronique

Posté par
sur 22 septembre 2013 - 04:50
dans
Electronique

Posté par
sur 22 septembre 2013 - 09:11
dans
Electronique
/>
Posté par
sur 26 juillet 2013 - 12:04
dans
Electronique

Posté par
sur 25 juillet 2013 - 04:44
dans
Electronique

Posté par
sur 29 octobre 2014 - 02:08
dans
Electronique
Transfo branché sur secteur.
Posté par
sur 29 octobre 2014 - 12:59
dans
Electronique
Salut les gars,
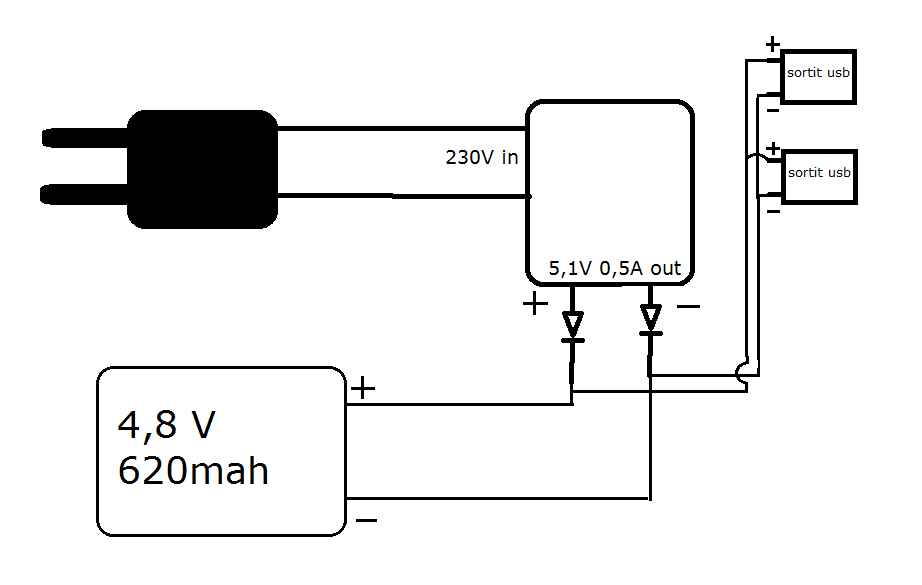
Je cherche en vain depuis quelques jours un schéma de circuit d'alimentation pour la carte de contrôle de mon vérin ( que j'ai déjà faite ).
J'ai besoin d'un circuit d'alimentation 12V avec minimun 5A en sortie ( le vérin fait 60W, donc, si mes calculs sont bon I = 60/12 ce qui fait bien 5A ).
Le circuit doit aussi être relativement fiable et efficient ( il sera sollicité en permanence ) ainsi que bon marché de préférence ( car pour production à moyenne/grande échelle ).
Les seuls circuits que j'ai trouvé pour l'instant sont soit vraiment trop "cheap", soit à base de régulateurs de tension de la série des 78xxx qui ne permette une intensité de sortie de max 1A...
Donc si quelqu'un une solution, ou d'un lien pour m'orienter dans mes recherches, je prend ! 
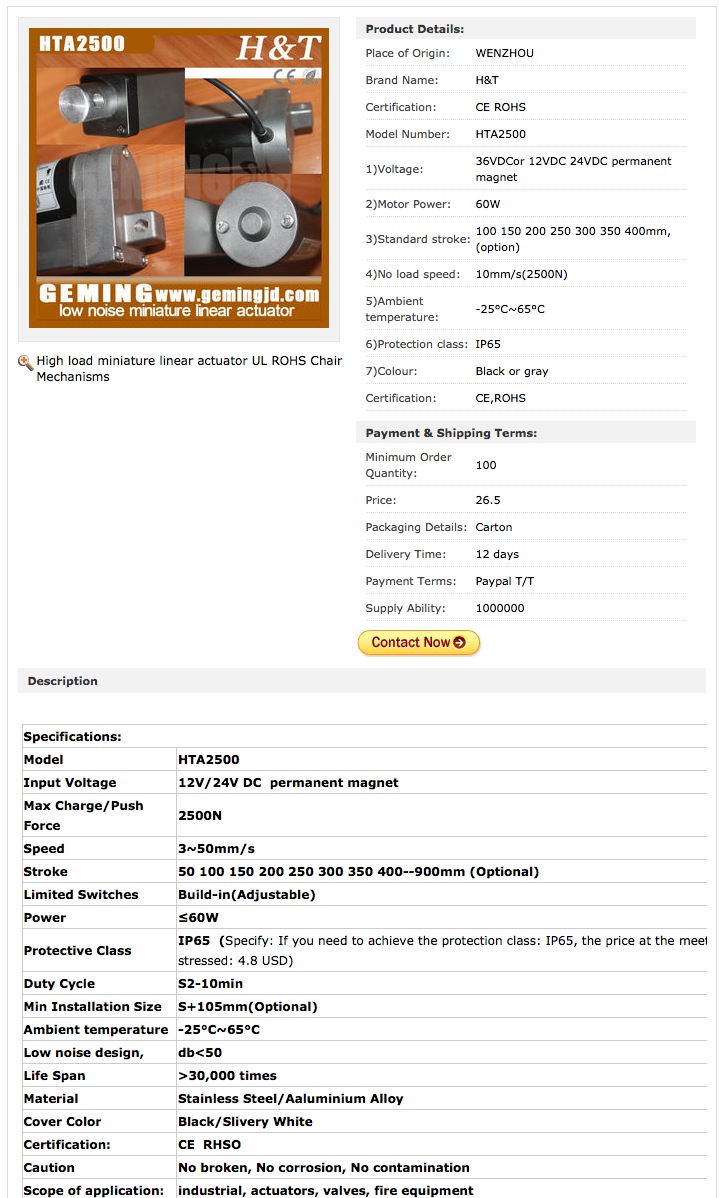
Voila les specs du vérin : http://www.gemingag.com/sell-high_load_miniature_linear_actuator_ul_rohs_chair_mechanisms-113453.html
Merci d'avance !

Posté par
sur 03 novembre 2014 - 08:09
dans
Electronique
Merci pour vos réponse 
J'ai effectivement trouvé moi aussi sans trop de difficulté des adaptateurs AC DC 12V 5A déjà tout fait. Le truc c'est que j'aimerais que le circuit d'alimentation ( transfo compris ) soit directement sur la carte de contrôle de mon vérin ( comme ça, je n'ai qu'un PCB à faire faire ).
Pour cela, il me faudrait plus les schémas de ces adaptateur plutôt que des tout fait et c'est ca que je ne trouve
@ChristianR : Pour ce qui est du "pic" de consommation des moteurs au démarrage, je pensais plutôt mettre un gros condo en parallèle pour envoyer le jus du démarrage. Vous en pensez quoi ?
Posté par
sur 11 mai 2012 - 06:36
dans
Cocotix, mon premier robot
Posté par
sur 10 mai 2012 - 10:59
dans
Cocotix, mon premier robot
Posté par
sur 10 mai 2012 - 08:04
dans
Cocotix, mon premier robot
Posté par
sur 13 mai 2012 - 10:52
dans
Cocotix, mon premier robot
Posté par
sur 10 mai 2012 - 05:24
dans
Cocotix, mon premier robot


Posté par
sur 20 mars 2013 - 01:29
dans
Programmation
Posté par
sur 19 mars 2013 - 07:17
dans
Programmation
Posté par
sur 20 mars 2013 - 03:14
dans
Programmation
Posté par
sur 10 avril 2013 - 09:00
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 10 avril 2013 - 06:41
dans
Conseils et aide aux débutants, livres et kits en robotique

Posté par
sur 10 avril 2013 - 06:18
dans
Conseils et aide aux débutants, livres et kits en robotique
#include <IRremote.h>
unsigned long someValue = 0xA16EC03F; // where XXXXXXXX is on our your remote's values.
int motor1Pin1 = 3; // pin 2 on L293D
int motor1Pin2 = 4;
int motor2Pin1 = 5; // pin 2 on L293D
int motor2Pin2 = 6;
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
int enablePin = 9;
int enable2Pin = 10;
// the setup routine runs once when you press reset:
void setup() {
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
// initialize the digital pin as an output.
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
digitalWrite(enablePin, HIGH);
digitalWrite(enable2Pin, HIGH);
}
// the loop routine runs over and over again forever:
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
irrecv.resume(); // Receive the next value
}
if(results.value == someValue) {
digitalWrite(motor1Pin1, LOW); // set pin 2 on L293D low
digitalWrite(motor1Pin2, HIGH); // set pin 7 on L293D high
digitalWrite(motor2Pin1, LOW); // set pin 2 on L293D low
digitalWrite(motor2Pin2, HIGH);// turn the LED on (HIGH is the voltage level) // wait for a second
}
else {
digitalWrite(motor1Pin1, LOW); // set pin 2 on L293D low
digitalWrite(motor1Pin2, LOW); // set pin 7 on L293D high
digitalWrite(motor2Pin1, LOW); // set pin 2 on L293D low
digitalWrite(motor2Pin2, LOW);
}
}
Posté par
sur 10 avril 2013 - 07:29
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 10 avril 2013 - 08:47
dans
Conseils et aide aux débutants, livres et kits en robotique
Ne serait-ce pas un problème de "refresh"? je veux dire, la commande IR dure un certain temps, et peut être que cette impulsion ne suffit pas
à faire bouger significativement les moteurs.
Posté par
sur 23 avril 2013 - 07:20
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 20 avril 2013 - 08:46
dans
Conseils et aide aux débutants, livres et kits en robotique
void loop() {
// Moteur A - Plein régime
analogWrite(ENA,255);
// Moteur B - Mi-régime
analogWrite(ENB,128);
}
Posté par
sur 26 avril 2013 - 09:17
dans
Conseils et aide aux débutants, livres et kits en robotique




