La seule carte son validée c'est la petite avec le bon son micro, la sortie audio est parfaite avec un bon mini amplificateur classe D + un transfo d'isolation audio
Contenu de Serveurperso
Il y a 392 élément(s) pour Serveurperso (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#100178 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
 Posté par
sur 16 novembre 2018 - 08:35
dans
Archives vigibot
Posté par
sur 16 novembre 2018 - 08:35
dans
Archives vigibot
#100175 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 16 novembre 2018 - 08:14
dans
Archives vigibot
Les robots de mike sont accessibles aux membres, minus ne craint rien c'est presque déjà une épave lol
#100173 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 16 novembre 2018 - 07:47
dans
Archives vigibot
Hop, la gestion des droits d'accès aux robots est opérationnelle !
#100086 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 12 novembre 2018 - 08:04
dans
Archives vigibot
Sur un gros robot il est plus classe piloter des gros H-bridge depuis un Arduino...
#100062 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 11 novembre 2018 - 11:37
dans
Archives vigibot
Parfaitement, les servomoteurs modifiés 360 c'est basiquement du tout-ou-rien pas de belles courbes de vélocité ce qui rend le robot quasi incontrôlable, d’où cette petite carte qui permet d'exploiter les belles consignes PWM-DMA de la Raspberry PI et les différents mode de pilotage de l'interface web
#99919 Un "jeu" pc ou on contrôle des véhicules a distance en temps reel
Posté par
sur 08 novembre 2018 - 01:29
dans
Bric-à-brac
Décors absolument époustouflant.
Tout est possible même de refaire ce genre de jeu, mais il incombe aux Utilisateurs de respecter les CGU 😂 c'est a dire pas de robomitraillettes ni de chasses au chat ou à la belle mère avec les robots vigibot ! Le système permettra de faire des groupes d'amis privés avec des robots ou des caméras vitrines pour les visiteurs inscrits ou non...
Tout est possible même de refaire ce genre de jeu, mais il incombe aux Utilisateurs de respecter les CGU 😂 c'est a dire pas de robomitraillettes ni de chasses au chat ou à la belle mère avec les robots vigibot ! Le système permettra de faire des groupes d'amis privés avec des robots ou des caméras vitrines pour les visiteurs inscrits ou non...
#99884 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 06 novembre 2018 - 10:55
dans
Archives vigibot
Ça ne répond pas totalement a mes questions

Normal, je ne répond que ma partie et laisse le reste à Mike:)
#99877 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 06 novembre 2018 - 09:08
dans
Archives vigibot
Je vois que je ne suis pas le seul x)
J'ai quelques questions:
Si je prend une Lipo 3S quel sera le système de branchement jusque au raspberry ?
J'aimerais avoir le Fichier en 3D de Robil est-ce possible ?
Les moteurs si je prend ceci sans arduino et juste cette petite carte quel est le branchement sur le raspberry, ça se branche juste sur un GPIO 18 par exemple ?
Je souhaiterais être également conseillé sur l'achat d'une pince que pouvez-vous me conseiller ? Peut être impression 3D a voir...
Pour mettre au bout de ces moteurs y a-t'il une adaptation pour être compatible avec des roues mecanum ?
Quel est le système d’attache moteurs proposé sur le châssis de Robil et puis-je sans modification du châssis mettre les moteur sur celui-ci ?
Merci de vos réponses

Un LiPo 3S va nécessiter un convertisseur DC-DC pour obtenir le 5V.
On recommande dans un premier temps (le temps de fabriquer le PCB du module sécurisé multi 18650 en parallèle) d'utiliser un simple pack de batterie de smartphone !
- Le tuto de fabrication de l'image Vigibot depuis la Raspbian minimale comprendra la procédure de mise en lecture seule du système le rendant indestructible comme tout système embarqué digne de ce nom, pas de corruption de carte MicroSD chez nous lol -
- Exact pour les liens, mais pas de roues mecanum de prévu avec d'aussi petits moteurs format servo 9g...
Une roue mecanum à un porte a faux important et risque de foirer le petit arbre de nylon...
Une idée de truc à expérimenter : il faudrait faire des roues mecanum assez fines, simplifiées, en impression 3D.... sans rouleau qui fonctionne que sur la moquette comme un filetage en mode glissade... Mais du mecanum like sans asservissement ça reste de la bouïne... Déjà qu'avec asservissement il faut une suspension, et une certaine qualité de roues et une taille de robot pour que ça crabe correctement...
#99843 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 05 novembre 2018 - 09:34
dans
Archives vigibot
Ah ok, désolé, je suis arrivé sur cette page via la vidéo de Youtube ( ) et je pensais que le robot était à vocation à l’apprentissage de la conception / assemblage d'un robot pour découvrir ce beau monde ( donc à destination pour enfants & adultes ).
Je vais donc me diriger sur un autre projet si votre but est la surveillance à distance ( ou prise de contrôle à distance ).
Autant pour moi.
Bonne continuation en tout cas.
Cordialement.
Ce kit est un kit totalement générique qui sert à tout ce qu'on souhaite lui faire faire.
Cependant un Robot uniquement Raspberry PI sera à programmer en C/C++ / Python ou NodeJS,
Le Python était un langage idéal pour débuter.
Or qu'un robot Arduino sera exclusivement programmé en C/C++ mais avec certaines facilité comparé au C/C++ Raspberry PI.
#99813 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 04 novembre 2018 - 09:34
dans
Archives vigibot
Les polyswitchs ont une résistance interne importante vis à vis des courant qui seront utilisés. Vous allez donc avoir des problèmes de baisse de tension importante au démarrage des moteurs par exemple.
J'ai déjà testé pas de soucis, il suffit d'en installer 2 en parallèle pour chaque batteries ce qui fait 2 * 3 polyswitchs pour la version standard du robot je pense. Moi j'ai des support à 4 batterie ce qui exploite le maximum d'espace dispo sous le chassis.
Et c'est beaucoup mieux que le vdrop d'une schottky, qui pourrait tromper le circuit de gestion de charge 
ça fait 6 polyswitchs par robots donc du courant à gogo:) actuellement le pic de conso dépasse très rarement 2A en secouant le robot dans tout les sens...
Sur mes prototypes j'en met pas les cellules Panasonic NRC sont neuves et synchronisée.
Pièce jointe = exemple de réalisation PCB de couplage 1S2P de 18650 mis a l'épreuve avec le double du besoin sans reboot de la PI 3B+.
Je laisse Mike qui répond au reste
Image(s) jointe(s)

#99802 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 04 novembre 2018 - 07:10
dans
Archives vigibot
- Sur les photos, on dirait un Raspberry 2, est-ce exacte (il y a un dongle usb pour wifi) ? Passage au Raspberry 3 ?
C'est une 3B+ avec déjà le Wi-Fi intégré, l'interface Wi-Fi USB suplémentaire c'est juste pour le prototype (point d'accès Wi-Fi simultané au mode client)
Le logiciel fonctionne aussi très bien avec une PI 2, mais il faut une interface Wi-Fi USB obligatoirement pour le coup (a moins que le robot ne soit pas mobile alors un câble Ethernet suffit...)
- A quoi correspond l'autre dongle USB (on dirait une passerelle Radio) ?
Ya aussi une petite carte son USB car la PI ne possède pas d'ADC (pas d'entrée micro).
- Vous indiquez vouloir utiliser plusieurs Lipo en parallèle. Je vous le déconseille car les batteries vont se décharger entre elles, et pourrait provoquer un incendie. De plus, si un utilisateur met une batterie à l'envers, l'explosion sera immédiate. Je vous propose d'utiliser une diode Schottky par exemple sur chaque pile pour apporter une protection.
Aucun soucis avec des batteries NEUVES et synchronisées niveau charge décharge, que ce soit du LiPo ou du Li-ion 18650 (notre choix). ça fait juste une cellule 1S4P (1 série 4 parallèle)
Un PCB sécurisé est déjà prévu, on ajoutera des polyswitchs pour éviter les bêtises mais non pas besoin de diode Schottky.
- Que contiendra les kits que vous souhaitez vendre pour Noël ? Est-ce que la partie logiciel est Libre ou non, est-ce que qu'elle est inclus dans le kit ?
Attendre la réponse de Mike118 Le client sera open-source, le(s) serveur(s) étant chez OVH et sécurisé.
- L'interface de pilotage est apparemment uniquement en ligne, vous confirmer
Oui l'interface gratuite sera uniquement en ligne, et une interface web de pilotage locale sera dispo uniquement pour une version payante pour les "pros".
#99790 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 04 novembre 2018 - 03:45
dans
Archives vigibot
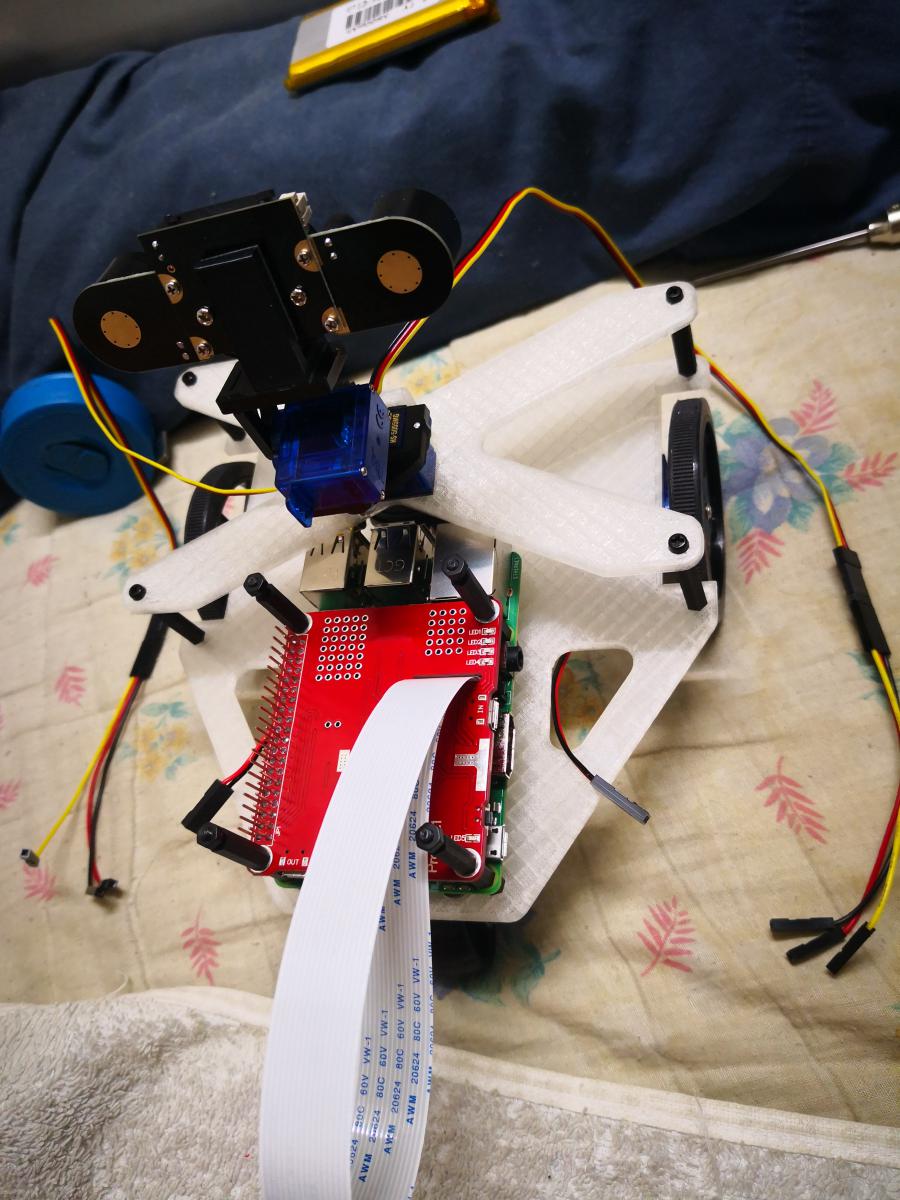
Le seul moyen que j'ai trouvé, passer par au dessus, permet de ne pas du tout marquer la nappe et ce à aucun endroit. Je suis maniaque avec le matos lol
Et j'ai une tête avec un servo + un engrenage qui permet à l'axe X / pan de faire presque le tour complet et aucun soucis.
Il devrait y avoir moyen de passer la nappe par dessous mais il faut forcément plier d'une certaine façon et faire des "accordéons" ou des boucles au niveau des articulations.
Les seules caméras -PI- utilisables sur des petits robots sont des grands angle de 170 degrés, les caméras officielles sont inutilisables - ça zoom / serre de trop et rend le pilotage désagréable - et il n'existe actuellement un seul modèle qui comporte un filtre IRcut amovible (bientôt sur la boutique du site) et permet d'avoir de bonnes couleurs la journée et une sensibilité potable la nuit avec les 2 fameuses leds de 1 watt qui servent d'illumination infrarouge.
ça permet de très bien voir une pièce de 40m carré sans soucis. Je pense plus. Soit quelques mètres devant le robot, 4 ou 5 mètres je pense...
Niveau sensibilité c'est un capteur CMOS 1/4 de pouce avec un gain assez faible (impossibilité de faire apparaître le plancher de bruit à l'image) sans les projecteurs 2 * 1W IR il ne faut pas compter voir quoi que ce soit la nuit.
Il reste à étudier la coupure des leds car elles consomment pas mal et ont tendance a rester allumé longtemps après la bascule en mode journée de la caméra. il faut beaucoup de lumière pour qu'elles se coupent. Je pense qu'il faudra apporter une mod pour injecter un signal de coupure forcé des leds IR.
La sensibilité est très dépendante du temps d'expo de chaque images et le compromis idéal que j'ai trouvé entre la fluidité du H.264 et la sensibilité c'est le 25FPS qui correspond au bon vieux PAL utilisé par d'autres robots plus avancés ayant de vrais caméras ou il commence à être possible de parler "sensibilité"
Des photos sans illumination IR, avec IR, lumière fluo, et la denière photo ni l'un ni l'autre mais avec une caméra CCD couleur 1/4 de pouce + un traitement vidéo maison
Image(s) jointe(s)



#99784 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 04 novembre 2018 - 03:08
dans
Archives vigibot
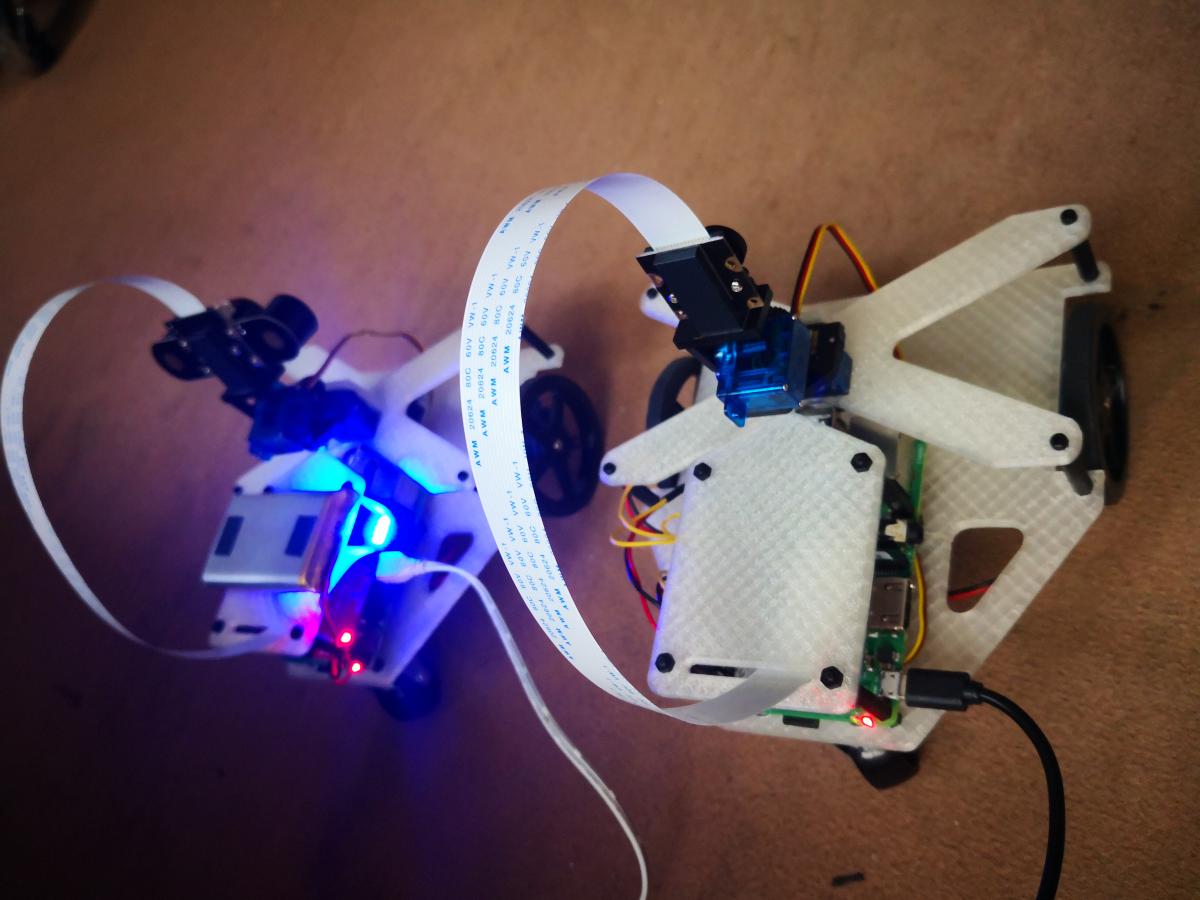
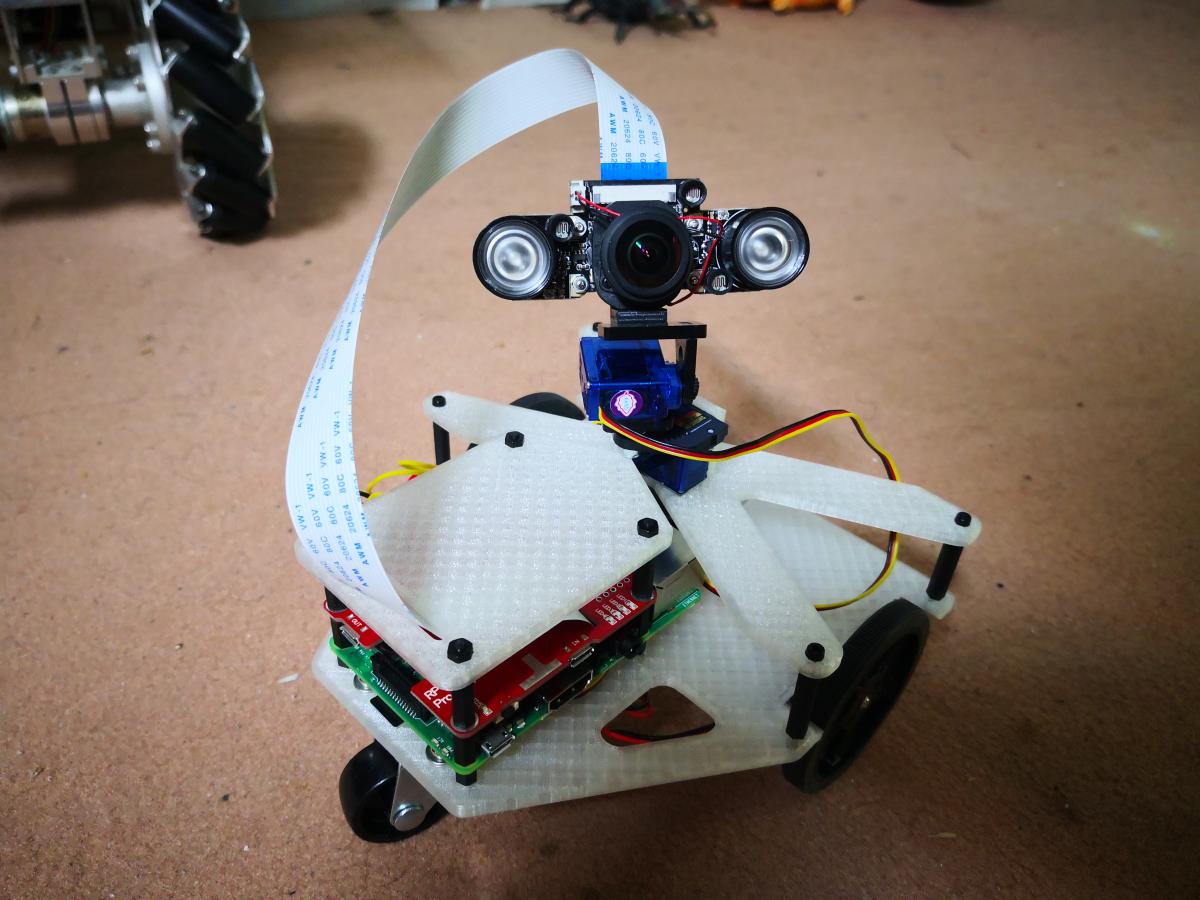
J'ai imprimé un autre robot ce matin et paf, ça fait un petit frère pour l'autre !
Ce sont des prototype les kits doivent contenir un PCB pour câbler le tout plus facilement. Sinon voila comment j'ai fait :
Avec une Raspberry PI on dispose de 2 pin 5 volts (et plusieurs GND). Du coup on peux alimenter 2 servomoteurs sans avoir besoin de rien d'autres que des fils standard 2.54 femelle-femelle.
Vu que la "petite carte de conversion PWM servo en PWM 0 à 100%" dispose elle aussi de deux pins 5V (et 2 pins GND), elle redistribue le jus "elle et rend la place qu'elle prend"
On se retrouve avec un robot complet soit 2 moteurs CC et 2 servomoteurs pour la tête n'ayant juste besoin que de quelques fils 2.54 femelle-femelle !
Image(s) jointe(s)



#99748 Minus V1.0 Un vigibot simplifié pour Noël en précommande ?
Posté par
sur 03 novembre 2018 - 11:40
dans
Archives vigibot
Ce châssis respecte les contraintes suivante :
1) Pas cher et facile à reproduire
2) Un robot qui ne tombe pas
3) Qui ne reste pas coincé et qui peux rouler sur un câble ou un gros tapis.
4) Autonomie de la mort possible : Max 4 batteries 18650 de 3400mAh soit 13.600 ampères heures.
- Mais il est possible de ne mettre qu'un LiPo ou une seule 18650 pour alléger le prix. (Tout est en parallèle.)
5) une tête qui permet de voir partout indépendamment de la position de la base, mais il est possible de ne monter qu'un seul axe (haut bas) ou aucun pour simplifier.
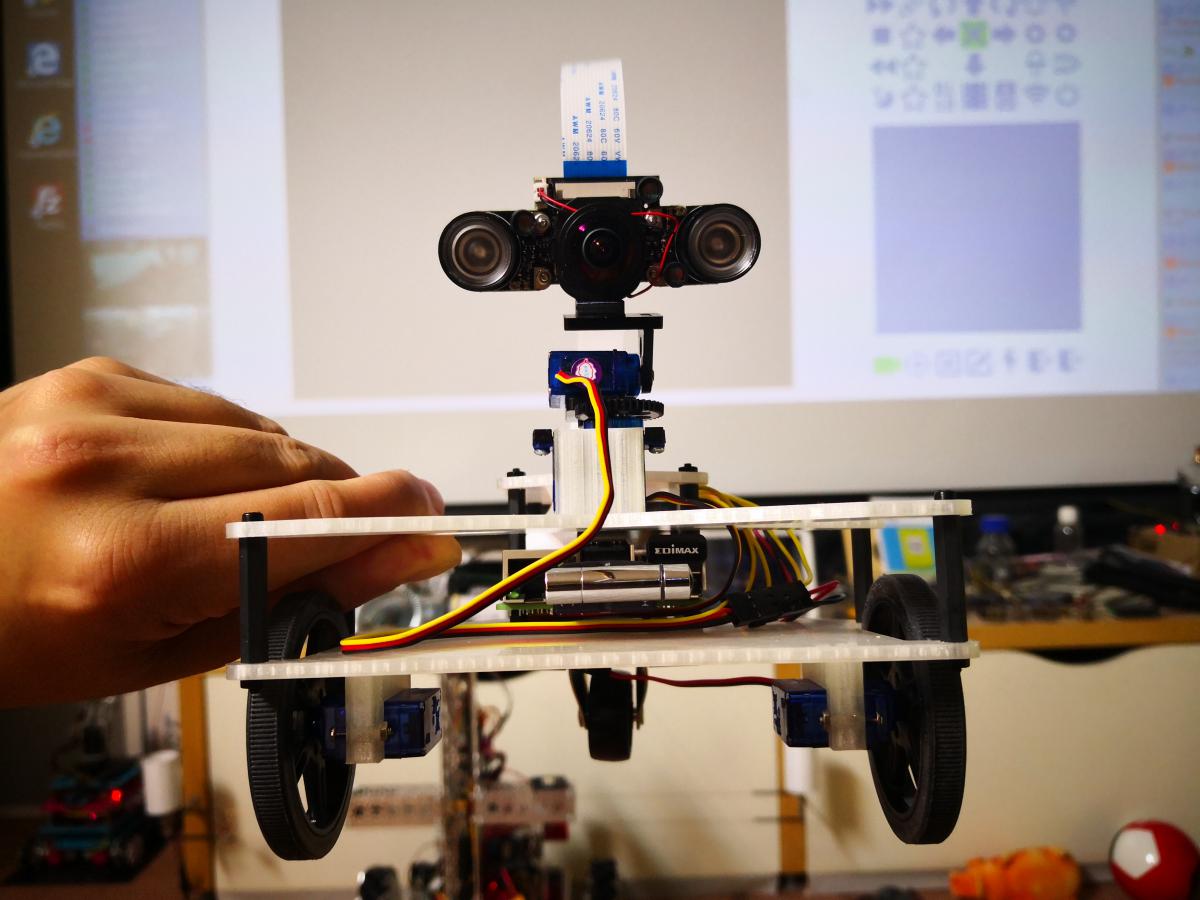
Vidéo d'un des premiers tests :
C'est aussi maniable que les autres robots qui coûtent chers - (le secret est de NE PAS utiliser de servomoteurs modifiés à rotation continue, ils ne permettent que du tout ou rien et ceci avec une précision très aléatoire - pente trop raide)
Voila des photos du montage aujoud'hui :
Image(s) jointe(s)











#99449 Les quadrupèdes font leur show à Madrid
Posté par
sur 16 octobre 2018 - 06:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Enorme le spotmini qui danse !!!
#99271 Projet VigiBot, le robot contrôlé facilement par internet pour tous par Vigir...
Posté par
sur 30 septembre 2018 - 09:23
dans
Assistance à la personne
Ce qui est en vert c'est le live le temps réel. Des points et lignes vertes (plus exactement clusters de points alignés) vues par le lidar.
Les lignes grises (features) sont la carte, elle est construite à l'aide des lignes vertes.
Quand on coupe la vidéo, les triangles gris sont les projections des lignes vertes et les lignes grises sont les projections de points verts :
ça aide au tuning de l'algo, à voir les superpositions de lignes ou de points par dessus des lignes (canaux alpha qui s’additionnent, truc purement visuel) .
#99269 Projet VigiBot, le robot contrôlé facilement par internet pour tous par Vigir...
Posté par
sur 30 septembre 2018 - 09:06
dans
Assistance à la personne
Ben aucune technique de SLAM ne fonctionne hors portée du lidar:) enfin ça s'appelle de l’odométrie oui lol
d'ailleurs avec une odometrie correcte quand le robot retrouve des obstacles si il est dans la tolérance il se raccroche a la localisation nickel
#99224 Robot jeu de labyrinthe à bille piloté par Internet
Posté par
sur 28 septembre 2018 - 07:17
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Quelqu'un à eu l'idée avant de foutre des servomoteurs sur ce même jeu par contre il à hard-codé les mouvements sur un ATmega32 et a mis le computer vision dans son TODO :
https://www.instruct...lled-Labyrinth/
Mais ce jeu est un bon benchmark de pilotage à faible latence ou il faut plus ou moins tenir en équilibre une bille
#99214 Robot jeu de labyrinthe à bille piloté par Internet
Posté par
sur 27 septembre 2018 - 11:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Carrément, et ça, les robots simples-PI à gogo arrivent ! des que le rechargement à distance est opérationnel sur les 3 premiers j'en monte direct 3 de plus.
Zut il en manquera 4 pour faire deux équipes de foot-five
10 robots c'est encore loin de la limite en 802.11ac - 5.8Ghz
Zut il en manquera 4 pour faire deux équipes de foot-five
10 robots c'est encore loin de la limite en 802.11ac - 5.8Ghz
#99212 Robot jeu de labyrinthe à bille piloté par Internet
Posté par
sur 27 septembre 2018 - 11:10
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je pense a une version baby-foot ou il faut des servomoteurs ultra rapides et avec une raspberry pi de chaque côté, soit 2 robots que 2 joueurs peuvent piloter
#99207 Robot jeu de labyrinthe à bille piloté par Internet
Posté par
sur 26 septembre 2018 - 10:00
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Petite idée de sous projet sympathique pour avoir un jouet en ligne :
Je vais le réaliser immédiatement car c'est amusant ne coûte pas cher et très rapide à faire.
C'est aussi évolutif en technicité -> un algo computer vision pourra piloter la bille.
J'ai déjà commandé le labyrinthe en bois de ce type (prime ça arrive demain soir lol) :
https://www.amazon.f...0?ie=UTF8&psc=1
Planches options :
https://www.amazon.f...0?ie=UTF8&psc=1
La caméra sera bien évidemment fixée au dessus avec une led blanche d'éclairage (genre 1w).
Il n'y a besoin que de 2 servomoteurs pour le pilotage du plateau, en direct drive ou via une réduction/multiplication via courroie élastique et/ou impression 3D pour obtenir le bon rapport de pilotage.
Plus un servomoteur ou autres qui s'occupe de la remontée de la bille = encore chose amusante à faire.
c'est toujours mieux que de boucher les trous et devoir faire une rescousse pour éjecter la bille.
Actuellement le robot "Raspibot" : https://www.vigibot.com/ est le POC d'une PI toute seule capable de piloter plusieurs servomoteurs, soit autant qu'il y a d'I/O dispo sur la PI, avec une précision à la microseconde "jitter-free" grâce à DMA !
ça risque d'être rigolo de voir si 2 joueurs s'en sortent avec 50% de pilotage chacun (moyenne comme actuellement sur les robots) ou même tester avec un seul axe chacun.
Image(s) jointe(s)

#99206 passage https
Posté par
sur 26 septembre 2018 - 09:45
dans
Les annonces Robot Maker
Gros boulot.
Tout passer en RELATIF adieu les URI absolues hardcodées partout.
Le niveau ultime c'est que tout le site fonctionne dans un "sous répertoire" de n'importe quelle localisation (mais la faut pas trop en demander il faut une conception irréprochable de la totalité) avec une seule fois la base (canonique) dans une constante d'un fichier de conf principal.
A défaut le niveau de base strict obligatoire c'est d'arriver à s’abstraire du protocole et du domaine -> c'est a dire les liens doivent partir de la racine (du premier /) ça donne une robustesse sans avoir besoin de maîtriser les appels en relatif de partout
Aussi tu peux commencer un lien par "//" pour spécifier le domaine sans spécifier le protocole. exemple //www.robot-maker.com/forum mais vu que t'as besoin de naviguer au seins du même site démarrer par un seul "/" est le mieux
ça sent aussi la moulinette pour MAJ la db tout ça:) enfin le Mike qui passe un temps fou à tout corriger à la mano:)
#99205 besoin d'aide programmation arduino
Posté par
sur 26 septembre 2018 - 09:24
dans
Conseils et aide aux débutants, livres et kits en robotique
Faut aussi isoler l'alim du genre avec un DC-DC isolé (avec masse non commune genre les Tracopower que j’utilise partout) mais en attendant une simple batterie fera le job c'est obligé que ça fonctionne
#99155 besoin d'aide programmation arduino
Posté par
sur 22 septembre 2018 - 05:59
dans
Conseils et aide aux débutants, livres et kits en robotique
Alors Seb ça avance ? (je lui ai envoyé un SMS)
Optocouplage / filtrage d'alim à gogo obligatoire sur les I/O la dessus vu les parasites HV
Edit : je l'ai eu au tel il attend son Arduino:)
#99138 Mes robots web sécurisés avec accès publique !
Posté par
sur 21 septembre 2018 - 08:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
Hop! Nouvelles vidéos de la suite du développement du projet.
Test des fonctions multi-robots :
Demo visuelle de l'algorithme de cartographie et localisation simultanées (SLAM) :
Next : inscriptions sur vigibot.com qui permettra a n'importe qui de jouer avec des robots
Next2 : le tuto pour installer le client de cloud sur raspberry pi afin d'y connecter son robot avec le minimum de choses a faire ou à acheter = une PI, 2 servomoteurs et une PIcam
Test des fonctions multi-robots :
Demo visuelle de l'algorithme de cartographie et localisation simultanées (SLAM) :
Next : inscriptions sur vigibot.com qui permettra a n'importe qui de jouer avec des robots
Next2 : le tuto pour installer le client de cloud sur raspberry pi afin d'y connecter son robot avec le minimum de choses a faire ou à acheter = une PI, 2 servomoteurs et une PIcam




