Petite question en passant: tu as pensé à regarder les valeurs des résistances déjà présentes dans ta souris?
Tu as essayé de te faire un schéma électronique de la souris, et des composants autours de ton capteur? Ca me semble indispensable pour comprendre comment ça marche. Je t'avais déjà conseillé de procéder ainsi, mais je ne sais pas si tu l'as fait.
Tu as essayé de chercher les références et les datasheet des composants de ta souris? Je parle bien des composants "référencés". Personnellement, ça m'avait été d'une grande aide.
Leon.
Contenu de Leon
Il y a 1000 élément(s) pour Leon (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#15630 Photo-Transistor Brochage?
 Posté par
sur 27 avril 2010 - 07:38
dans
Electronique
Posté par
sur 27 avril 2010 - 07:38
dans
Electronique
#15619 le quadrupéde avec pattes tiroir
Posté par
sur 26 avril 2010 - 06:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Dans cette position, il doit être super stable...
Leon.
Leon.
#15618 Mon projet pas à pas
Posté par
sur 26 avril 2010 - 06:15
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
As-tu bien vérifié les paramètres de ta com série partout? Partout = Fox + PC + PIC.
Ce qu'il y a à vérifier:
Baud Rate? Bit de parité? Longueur du Start? Du Stop? Contrôle de flux?
Sinon, pas besoin de 2 PC pour espionner les 2 sens d'une liaison série. Il y a 2 méthodes très simples:
Soit tu rajoutes un port série avec un adaptateur USB supplémentaire.
Soit tu fais un "espion série" qui fait un OU logique entre 2 lignes. Si tes 2 micros (fox+PIC) ne parlent pas en même temps (ce qui doit se vérifier avec le programme que tu utilises), alors 1 seul port série suffit.
Attention, le OU logique se fait avec des niveaux de tension inversés. Un 1 correspond à 0V, et un 0 correspond à 3VV. Donc en fait, pour faire un OU logique sur des liaisons série 3V (ou 5V), il faut en fait utiliser des portes ET... pas très logique tout ça, mais c'est comme ça!
Leon.
Ce qu'il y a à vérifier:
Baud Rate? Bit de parité? Longueur du Start? Du Stop? Contrôle de flux?
Sinon, pas besoin de 2 PC pour espionner les 2 sens d'une liaison série. Il y a 2 méthodes très simples:
Soit tu rajoutes un port série avec un adaptateur USB supplémentaire.
Soit tu fais un "espion série" qui fait un OU logique entre 2 lignes. Si tes 2 micros (fox+PIC) ne parlent pas en même temps (ce qui doit se vérifier avec le programme que tu utilises), alors 1 seul port série suffit.
Attention, le OU logique se fait avec des niveaux de tension inversés. Un 1 correspond à 0V, et un 0 correspond à 3VV. Donc en fait, pour faire un OU logique sur des liaisons série 3V (ou 5V), il faut en fait utiliser des portes ET... pas très logique tout ça, mais c'est comme ça!
Leon.
#15580 Diode Haute Luminéscence et Resistance.
Posté par
sur 23 avril 2010 - 11:42
dans
Electronique
NON, une diode n'est pas systématiquement liée à une résistance.
Ce qui est très important, c'est de maitriser le COURANT traversant la diode.
Le moyen le plus simple et le plus bête pour le faire, c'est avec une RESISTANCE. Pour calculer la valeur de ta résistance, il faut connaitre le courant que tu souhaites voir dans ta diode (courant nominal dans les caractéristiques de ta diode), la tension d'alimentation de ton montage, et la tension nominale aux bornes de la diode (donnée dans les caractéristiques de la diode). Avec la loi d'Ohm, tu en déduis que:
R = (U_Alim - U_LED)/I_LED
Sinon, pour les LEDs à vraiment haute luminescence (1W ou plus), on n'utilise plus du tout de résistance, mais des régulateurs de courant. Un montage plus compliqué, mais plus intelligent, qui permet d'avoir un bon rendement, contrairement à la résistance qui fait perdre énormément de rendement.
Leon.
Ce qui est très important, c'est de maitriser le COURANT traversant la diode.
Le moyen le plus simple et le plus bête pour le faire, c'est avec une RESISTANCE. Pour calculer la valeur de ta résistance, il faut connaitre le courant que tu souhaites voir dans ta diode (courant nominal dans les caractéristiques de ta diode), la tension d'alimentation de ton montage, et la tension nominale aux bornes de la diode (donnée dans les caractéristiques de la diode). Avec la loi d'Ohm, tu en déduis que:
R = (U_Alim - U_LED)/I_LED
Sinon, pour les LEDs à vraiment haute luminescence (1W ou plus), on n'utilise plus du tout de résistance, mais des régulateurs de courant. Un montage plus compliqué, mais plus intelligent, qui permet d'avoir un bon rendement, contrairement à la résistance qui fait perdre énormément de rendement.
Leon.
#15558 Photo-Transistor Brochage?
Posté par
sur 21 avril 2010 - 06:51
dans
Electronique
J'ai merdé, j'ai édité le message précédent de Jojo avec mes nouveaux droits de modérateurs en croyant lui répondre... Désolé!
Du coup, on ne comprend plus rien à rien dans l'enchainement de la conversation.
J'espère que Bernard saura nous réparer ça!
Leon.
Du coup, on ne comprend plus rien à rien dans l'enchainement de la conversation.
J'espère que Bernard saura nous réparer ça!
Leon.
#15544 Mon projet pas à pas
Posté par
sur 20 avril 2010 - 05:43
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour à toi. Je ne pourrais pas t'aider sur le programme.Je ne suis pas sûr que ce programme écrive dans /dev/ttyS1, comment puis je le vérifier ??
L'envoi du signal 255 0 1 72 par exemple, suffit-il à contrôler le servomoteur ??
Par contre, personnellement, j'essaye toujours de voir ce qu'il se passe physiquement.
Ici, la meilleur des choses à faire, c'est de brancher le port série de ta Fox (celui utilisé pour piloter les servos) sur ton PC, pour voir ce qu'envoie la FOX, au travers d'un terminal série. Je pense que tu peux réutiliser l'adaptateur que tu as bricolé pour le "port console".
Pareil pour vérifier comment fonctionne le PIC: tu branches ton PC au PIC et tu envoies les bons caractères au moyen d'un terminal ou d'un autre logiciel qui bidouille le port série. J'utilisais "ComTools", qui permet aussi d'envoyer des données non ASCII (en hexa ou décimal).
Leon.
#15542 Photo-Transistor Brochage?
Posté par
sur 19 avril 2010 - 07:44
dans
Electronique
Attention, il y a bien 2 résistances à régler: celle de la diode émettrice, et celle du phototransistor. Si tu n'avais pas de résultat en réflexion sur une roue, c'est peut être qu'il fallait augmenter la puissance (=le courant) dans la diode émettrice, et donc diminuer la résistance.Mais je n'ai toujours pas compris pourquoi mon transistor ne saturait pas... Surtout que j'avais monté deux transistor en inverseur et ça ne fonctionnait pas du tout. Et je suis sur du brochage car j'ai vérifié avec mon multimètre en test diode.
Il ne me reste plus qu'à monter tout ça et regarder si la valeur des resistances correspond...
Admetons que ma led (de test) reste trop longtemps allumé, que faut-il faire? baisser la valeur de la resistance ou l'augmenter?
Merci !
Après, si ta LED témoin est trop souvent allumée, il faut soit augmenter la résistance dans l'étage de réception, soit diminuer la résistance dans l'étage d'émission. Mais je te conseille de d'abord régler la résistance de l'étage d'émission de manière à obtenir des fronts nets en sortie. Après tu règles l'étage de réception. Avant de me décider, j'ai du essayer une dizaines de combinaisons de résistances.
Leon.
#15518 Comment faites vous vos circuits impimés
Posté par
sur 17 avril 2010 - 11:41
dans
Electronique
Je confirme que FAIRE FAIRE ses circuits imprimés par une entreprise spécialisée, c'est une très bonne idée!
Je viens de faire réaliser 2 circuits imprimés de ma conception par la société OLIMEX basée en Bulgarie.
http://www.olimex.com/pcb/index.html
Le prix est vraiment très avantageux, 4 à 5 fois moins cher que chez les prototypeurs français! 46 euros pour 2 petits circuits double face, trous métallisés, verni épargne 2 faces avec masque différent sur les 2 faces, épaisseur d'époxy non standard, sérigraphie sur 1 face, 7 diamètres de perçage différents, une centaine de trous sur chaque carte, frais de port compris.
Livré à domicile moins de 2 semaines après l'envoi des fichiers, sans problème.
Une telle qualité est inatteignable pour l'amateur moyen, ça nécessite trop de moyens (métallisation).
Certes, ça peut être amusant de réaliser ses PCB soi même, mais on est vite limité. Personnellement, j'ai horreur de ça, je n'aime pas manipuler des produits chimiques.
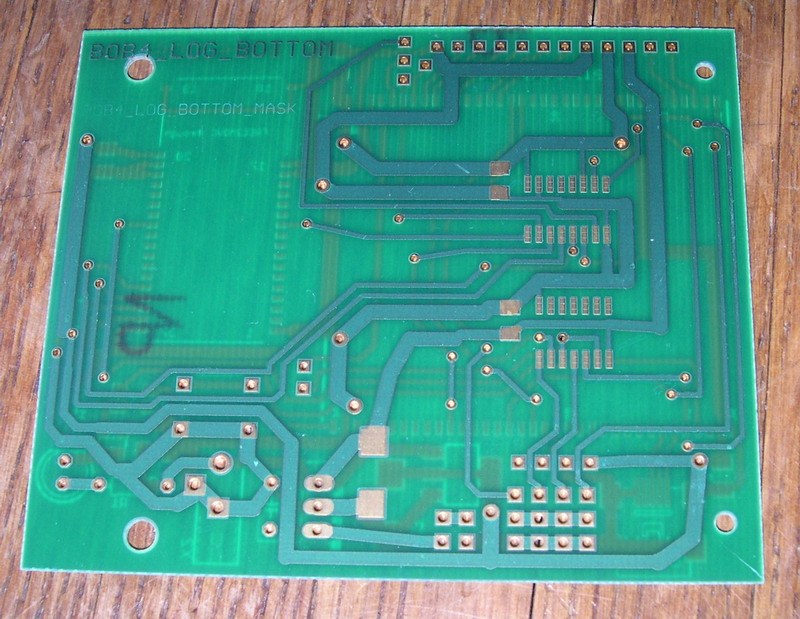
Voilà ce que je viens de recevoir par la Poste. Ca peut aussi servir de Teasing... Mais quoidoncquec'est?
recto:
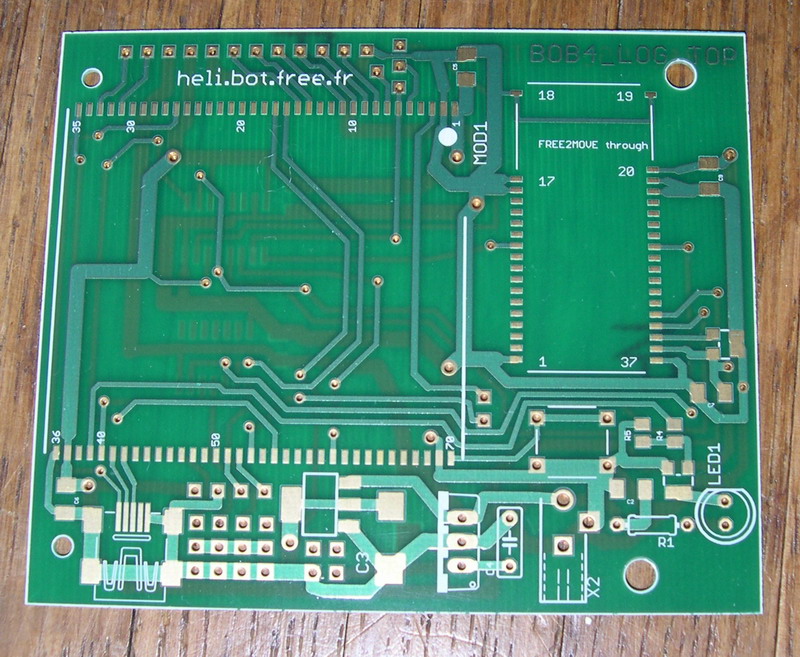
verso:
Leon.
Je viens de faire réaliser 2 circuits imprimés de ma conception par la société OLIMEX basée en Bulgarie.
http://www.olimex.com/pcb/index.html
Le prix est vraiment très avantageux, 4 à 5 fois moins cher que chez les prototypeurs français! 46 euros pour 2 petits circuits double face, trous métallisés, verni épargne 2 faces avec masque différent sur les 2 faces, épaisseur d'époxy non standard, sérigraphie sur 1 face, 7 diamètres de perçage différents, une centaine de trous sur chaque carte, frais de port compris.
Livré à domicile moins de 2 semaines après l'envoi des fichiers, sans problème.
Une telle qualité est inatteignable pour l'amateur moyen, ça nécessite trop de moyens (métallisation).
Certes, ça peut être amusant de réaliser ses PCB soi même, mais on est vite limité. Personnellement, j'ai horreur de ça, je n'aime pas manipuler des produits chimiques.
Voilà ce que je viens de recevoir par la Poste. Ca peut aussi servir de Teasing... Mais quoidoncquec'est?
recto:
verso:
Leon.
#15514 Photo-Transistor Brochage?
Posté par
sur 17 avril 2010 - 08:10
dans
Electronique
Parce que les courants sont incompatibles. Donc il faut "amplifier le signal", et surtout, ne pas perturber le montage [phototransistor+résistance de polarisation], en consommant juste un courant négligeable. Le courant "prélevé" par le transistor doit être négligeable devant le courant maxi traversant la résistance de polarisation. Sinon, ça fausse la mesure!Pourquoi avoir mis un transistor entre la diode et le photo transistor?
L'émetteur du Photo transistor était à la masse je suppose, avec une résistance sur son collecteur. Et le transistor alors? comment était-il connecté dans tout ça? la base était connectée entre le collecteur du photo transistor et la résistance?
Merci de ton aide.
Une règle de base, c'est quand on mesure quelque chose, il faut bien vérifier que la mesure ne perturbe pas le phénomène physique que tu veux mesurer. Si tu intercalle directement ta LED dans ton montage, le montage n'est plus du tout le même. Les instruments de mesure de tension ont tous une impédance d'entrée très grande, ce que j'ai reproduis ici, en mettant même une résistance sur la base du transistor.
Je précise bien que le transistor n'était là que pour le montage de test. Il n'est plus présent après sur le montage définitif.
Mais tu peux très bien utiliser ton PICBASIC pour régler tout ça, et lui faire jouer le rôle de l'amplificateur à grande impédance d'entrée. Un petit programme tout simple fera l'affaire. Allume une LED en fonction de l'état d'une broche.
Leon.
#15512 Photo-Transistor Brochage?
Posté par
sur 17 avril 2010 - 07:33
dans
Electronique
Pas besoin d'oscillo... A l'époque où j'ai réglé tout ça, je n'en avais pas.Je comprend ce que tu veux dire, mais comment puis-je faire pour déterminer les résistances en fonction du montage mécanique? Il me faut un oscilloscope pour équilibrer les créneaux?
L'oeil humain est un capteur très précis! J'avais fait un montage dédié qui allumait une diode avec les créneaux de la roue codeuse (transistor entre les 2). A basse vitesse, en faisant tourner à la main ma roue codeuse, et je regardais bien la LED. C'est assez facile de déterminer si la LED est trop souvent allumée ou trop souvent éteinte.
Mais avant ça, il faut aussi bien vérifier les tensions obtenues en sortie, et surtout le fait d'avoir des fronts assez nets. Pareil, un simple multimètre suffit, en faisant tourner à très basse vitesse.
Bref, quand on manque de moyens (matériels et/ou financiers), il faut avoir de l'imagination pour bidouiller!
Leon.
#15510 Robots Humanoïdes taille humaine
Posté par
sur 17 avril 2010 - 05:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Vous les 2 assidus (et admins) du forum, pourquoi vous n'ouvrez pas un sujet dédié sur vos projets de bipède 'king size'?
Je suis certain que vous auriez demandé à un petit nouveau de déplacer ses messages, s'il avait osé polluer autant un sujet...
Pour l'alimentation, je n'ai absolument aucune idée de la puissance que consomme un robot bipède "full size". Vous en savez certainement plus que moi. En plus, ça dépend certainement des moteurs choisies (puissance, démultiplication), et des performances attendues.
Par contre, faire des alimentations indépendantes pour plusieurs parties du corps, ça me parait une mauvaise idée. L'énergie, il faut la mutualiser. Séparer, c'est à la fois augmenter la complexité, mais aussi diminuer les performances. Si un membre du corps a besoin à un instant donné de toute sa puissance, le rendement sera plus efficace si on utilise toutes les batteries du robot en même temps. Eh oui, le rendement d'une batterie dimunue avec la puissance débitée. Donc pourquoi pas répartir les batteries à différents endroits. Mais dans ce cas, elles doivent être sur le même réseau électrique.
Concernant l'énergie dans un humanoide, on en parlait ici sur le forum voisin (et ami):
http://forum.caliban-web.com/energie/construire-reseau-energetique-solution-intermediaire-t216.html?sid=882421fd2c23957b7fd3089ef40fcd19#p3312
Et pour en revenir aux robots qui tombent en n'apprenant PAS, que pensez-vous d'Asimo? Le plus célèbre des robots humanoide, qui doit certainement être à la retraite maintenant... Ce que j'aime bien, c'est la voix du soit disant Asimo qui continue de parler comme si de rien n'était!
Personnellement, je ne comprends absolument pas l'approche de Honda sur Asimo, qui va à l'encontre de tout ce que j'ai appris en automatique. On a vraiment l'impression qu'Asimo travaille à 90% en boucle ouverte. Donc on adapte l'environnement pour qu'Asimo puisse évoluer dedans, plutôt que l'inverse!
Leon.
Je suis certain que vous auriez demandé à un petit nouveau de déplacer ses messages, s'il avait osé polluer autant un sujet...
Pour l'alimentation, je n'ai absolument aucune idée de la puissance que consomme un robot bipède "full size". Vous en savez certainement plus que moi. En plus, ça dépend certainement des moteurs choisies (puissance, démultiplication), et des performances attendues.
Par contre, faire des alimentations indépendantes pour plusieurs parties du corps, ça me parait une mauvaise idée. L'énergie, il faut la mutualiser. Séparer, c'est à la fois augmenter la complexité, mais aussi diminuer les performances. Si un membre du corps a besoin à un instant donné de toute sa puissance, le rendement sera plus efficace si on utilise toutes les batteries du robot en même temps. Eh oui, le rendement d'une batterie dimunue avec la puissance débitée. Donc pourquoi pas répartir les batteries à différents endroits. Mais dans ce cas, elles doivent être sur le même réseau électrique.
Concernant l'énergie dans un humanoide, on en parlait ici sur le forum voisin (et ami):
http://forum.caliban-web.com/energie/construire-reseau-energetique-solution-intermediaire-t216.html?sid=882421fd2c23957b7fd3089ef40fcd19#p3312
Et pour en revenir aux robots qui tombent en n'apprenant PAS, que pensez-vous d'Asimo? Le plus célèbre des robots humanoide, qui doit certainement être à la retraite maintenant... Ce que j'aime bien, c'est la voix du soit disant Asimo qui continue de parler comme si de rien n'était!
Personnellement, je ne comprends absolument pas l'approche de Honda sur Asimo, qui va à l'encontre de tout ce que j'ai appris en automatique. On a vraiment l'impression qu'Asimo travaille à 90% en boucle ouverte. Donc on adapte l'environnement pour qu'Asimo puisse évoluer dedans, plutôt que l'inverse!
Leon.
#15509 Photo-Transistor Brochage?
Posté par
sur 17 avril 2010 - 05:00
dans
Electronique
Sur la souris que j'ai utilisée pour BOB3, le composant noir à 3 pattes était bien un double photo-transistor, avec des fenêtres d'observation dont l'écartement est bien précis, et permet de générer un signal "en quadrature", permettant de déterminer le sens.
Pour le brochage, il y avait un collecteur commun au centre du composant, et 2 émetteurs de part et d'autre. Je ne sais pas si c'est tout le temps comme ça. En fait, tu peux assez facilement déterminer ça en regardant attentivement le PCB de ta souris démontée, en repérant bien masse et alimentation.
Attention, quand tu va monter tout ça, il faudra bien choisir les résistances adaptées à ton montage mécanique, de façon à obtenir un signal créneau bien régulier, et surtout bien équilibré: autant de temps à 1 qu'à 0 à vitesse constante, rapport cyclique 50%.
Leon.
Pour le brochage, il y avait un collecteur commun au centre du composant, et 2 émetteurs de part et d'autre. Je ne sais pas si c'est tout le temps comme ça. En fait, tu peux assez facilement déterminer ça en regardant attentivement le PCB de ta souris démontée, en repérant bien masse et alimentation.
Attention, quand tu va monter tout ça, il faudra bien choisir les résistances adaptées à ton montage mécanique, de façon à obtenir un signal créneau bien régulier, et surtout bien équilibré: autant de temps à 1 qu'à 0 à vitesse constante, rapport cyclique 50%.
Leon.
#15502 Quels type de Connecteurs?
Posté par
sur 16 avril 2010 - 07:03
dans
Electronique
Sur mon BOB3, j'ai 2 types de connecteurs: des HE10 montés sur nappe, ce sont des connecteurs très pratiques qui permettent d'avoir une assez grande densité facilement (sur 2 rangées). Un truc que j'utilise, c'est de faire des cordons en "y" avec 1 seul connecteur dû côté de la carte électronique, dispatché vers plusieurs connecteurs côté capteurs. Les 5 sonars de BOB3 sont branchés comme ça. Ca fait un connecteur très dense (20 broches), ça prend peu de place, beaucoup moins que 5 connecteurs 4 broches. Regarde sur mon site.J'ai trouvé ça mais j'aimerais avoir confirmation que c'est bien le bon produit.
http://www.electronique-diffusion.fr/product_info.php?cPath=23_421_454&products_id=11133&bcsi_scan_B469238607BCBD03=tobdneVs2XXc+nPfjkDX7YUAAACLvcWt&bcsi_scan_filename=product_info.php
http://ze.bot.free.fr/codeur/capteurs.html
Sinon, pour la "puissance", j'utilise des connecteurs type KK avec des clips à certir. Fiable et pratique (au pas de 2.54mm).
Leon.
#15479 Montage PicBasic 3b et régulation Moteur (pont en H)
Posté par
sur 14 avril 2010 - 07:26
dans
Electronique
Ca devrait être bon pour les transistors.Par contre pour faire l'inverseur (porte NON) j'ai des 2n2222 c'est bon? Et je met quoi comme valeur de resistance sur le colecteur du transistor? (10k?)
Merci !
Pour les résistances, je vais te donner une règle, plutôt que de te donner la valeur.
Regarde le courant maxi des entrées du L298N. Prend une résistance qui donne une chute de tension de 100mV sous ce courant.
Leon.
PS: oups, j'avais pas vu la réponse de Electron... désolé.
#15470 Adapter coder sur roue cybot?
Posté par
sur 14 avril 2010 - 05:44
dans
Electronique
D'abord, on dit un codeur, et non un coder. J'ai mis du temps à comprendre ta question...
Ensuite, voici une astuce pour mettre un codeur "fait maison" à l'intérieur même d'un motoréducteur (un servomoteur de modélisme ici).
http://pobot.org/Construction-des-elements.html
Leon.
Ensuite, voici une astuce pour mettre un codeur "fait maison" à l'intérieur même d'un motoréducteur (un servomoteur de modélisme ici).
http://pobot.org/Construction-des-elements.html
Leon.
#15464 Montage PicBasic 3b et régulation Moteur (pont en H)
Posté par
sur 13 avril 2010 - 06:33
dans
Electronique
Bof, vraiment, c'est un montage que je ne conseille pas du tout. Pourquoi? Eh bien parce que ton moteur va consommer tout le temps du courant, même à l'arrêt. Si tu veux faire un robot autonome ayant une certaine autonomie, ça peut devenir critique à mon avis. Le courant à l'arrêt va fortement dépendre de l'inductance/résistance de ton moteur. En plus, il se peut que le moteur et le L298 chauffent en permanance. Tu peux nous en dire un peu plus sur les performances de ton montage: consommation électrique à l'arrêt en comparaison de la consommation électrique quand le robot roule?l'avantage d'inverser le signal en entrée du pont c'est que tu gères le sens de rotation des moteurs directement avec la commande PWM, exemple :
out 11,1 : met enable des deux moteurs à 1
PWM 9,0 : marche arrière moteur sur patte 9 à 100%
PWM 9,127 : arret moteur sur patte 9
PWM 9,255 : marche avant moteur sur patte 9 à 100%
PWM 9,191 : marche arrière moteur sur patte 9 à 50%
PWM 9,159 : marche arrière moteur sur patte 9 à 25%
etc ....
Sinon, pour économiser des broches du contrôleur, il y a une solution très simple: 2 sorties PWM et 2 sorties pour le sens (4 broches en tout) suffisent. Il faut alors inverser le sens pour activer soit IN1 soit IN2 avec la sortie de sens (avant/arrière).
Leon.
#15461 Robots Humanoïdes taille humaine
Posté par
sur 13 avril 2010 - 06:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Encore un robot qui marche en 2D. En plus, il ne lui font même pas plier les jambes quand il monte la pente, il penche juste le torse en avant... pas très élégant, pas très efficace niveau stabilité.Comme celui-ci ?
http://video.google.com/videoplay?docid=4564803622267434918#docid=5180770557687181381
Leon.
#15445 Robots Humanoïdes taille humaine
Posté par
sur 12 avril 2010 - 07:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je me permet de pourrir un peu plus ce sujet "informatique" avec de la robotique...
Je viens de me renseigner sur ton fameux bipède. C'est sur qu'il présente bien... mais j'ai bien peur que ce soit un de ces Nieme projet qui n'a pas abouti et qui n'aboutira pas, où les chercheurs ont essayé de ré-inventer ce qui existe déjà, sans se baser suffisamment sur les expériences des projets autres. Combien de projets avortés? Combien de millions d'euros et d'années de recherches dépensés à ré-inventer la roue? J'en ai vu des robots à marche quasi statique 3D. J'en ai vu, des robots à marche dynamique 2D. Mais des robots à marche réellement dynamique en 3D? Réellement dynamique, et non avec des mouvements pré-programmé à 90% comme Asimo...
Comme je le disais dans ma présentation, je suis très très surpris du peu d'avancées récentes dans le domaine de la marche, et de la robotique en général. Le seul robot marcheur que j'ai vu se démerder, c'est PETMAN, et c'est tout. Et encore, on ne l'a pas vu marcher en condition réelle.
Leon.
Je viens de me renseigner sur ton fameux bipède. C'est sur qu'il présente bien... mais j'ai bien peur que ce soit un de ces Nieme projet qui n'a pas abouti et qui n'aboutira pas, où les chercheurs ont essayé de ré-inventer ce qui existe déjà, sans se baser suffisamment sur les expériences des projets autres. Combien de projets avortés? Combien de millions d'euros et d'années de recherches dépensés à ré-inventer la roue? J'en ai vu des robots à marche quasi statique 3D. J'en ai vu, des robots à marche dynamique 2D. Mais des robots à marche réellement dynamique en 3D? Réellement dynamique, et non avec des mouvements pré-programmé à 90% comme Asimo...
Comme je le disais dans ma présentation, je suis très très surpris du peu d'avancées récentes dans le domaine de la marche, et de la robotique en général. Le seul robot marcheur que j'ai vu se démerder, c'est PETMAN, et c'est tout. Et encore, on ne l'a pas vu marcher en condition réelle.
Leon.
#15444 applications de l'interface haptique
Posté par
sur 12 avril 2010 - 06:50
dans
Electronique
Ton message est complètement incompréhensible. Si tu veux de l'aide pour un projet d'étude, mieux vaut soit demander de l'aide à tes profs, soit venir avec de vraies questions claires.salut a tout le monde je suis entraîne de réaliser une interface haptique j'ai conçu la partie mécanique de telle sorte que je la place dans ma main j'ai utilisé des capteurs potentiométrique multi-tours de 10k
le problème se pose de la partie de commande qui contient un pic 18f4550 j'ai utilisé un fichier hid et je l'ai modifier au niveau des fichiers main.c que j'ai rajouté des interruption meme au niveau de l'usb mais le problème reste le user .c moi je veux que les données reçues des 3 capteurs soit converties et transmis par usb au pc et dés-que j'appuie au reset la partie mécanique reprend sont états initial a l'aide des moteurs qui sont relies au port B d'abord je veux demande est ce que je peux utiliser ça et comment je programme le user .c
Leon.
#15443 Salut
Posté par
sur 12 avril 2010 - 06:43
dans
Et si vous vous présentiez?
La robotique humanitaire? Quesako?
Leon.
Leon.
#15427 Aprés la Poubelle => IR bObot
Posté par
sur 11 avril 2010 - 09:22
dans
Conseils et aide aux débutants, livres et kits en robotique
Rien de révolutionnaire?Ce n'est pas l'endroit et je pense que je l'avais déjà dit mais mon futur robot est un bipède full scale.
Rien de révolutionnaire donc et j'en parlerais quand j'aurais un peu avancé
Des bipède "full scale" réalisés en amateur, il ne doit pas y en avoir beaucoup. Alors je pense bien au contraire que c'est révolutionnaire!
Leon.
#15414 Bientôt les robots se distingeront peu des humains oO
Posté par
sur 11 avril 2010 - 04:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
C'est de laquelle dont tu parle ? (je ne la vois pas)
Elle bouge la langue (!) et les doigts. Un peu de mise en scène avec le gars qui lui trifouille dans le dos. En plus, la vidéo ne semble pas toute jeune...
Leon.
#15412 Bientôt les robots se distingeront peu des humains oO
Posté par
sur 11 avril 2010 - 03:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Il y a un ou plusieurs fake dans tout ça.
Au moins "perfect women"
Leon.
Au moins "perfect women"
Leon.
#15410 Gestion catpeur Ultra-son
Posté par
sur 11 avril 2010 - 12:54
dans
Programmation
Jojo, tu as bien compris à quoi servaient les instructions "pulse" et "capture"? Tu as bien lu la doc du PICBasic là dessus? Tu as bien lu la doc du capteur ultra sons aussi? Avec tout ça, il ne te manque absolument rien pour comprendre comment organiser ton programme, et où rajouter ton "delay".
Encore une fois, as tu bien lu et relu INTEGRALEMENT la doc du PICBASIC? La doc de tes capteurs? Si tu n'as pas compris quelque chose, pose nous des questions.
De plus, comme je te l'ai déjà dit, je ne souhaite pas répondre aux sollicitations privées (si c'est pour des questions qui peuvent être posées sur le forum), ça ne sert à rien de m'envoyer des questions en message privés.
Leon.
Encore une fois, as tu bien lu et relu INTEGRALEMENT la doc du PICBASIC? La doc de tes capteurs? Si tu n'as pas compris quelque chose, pose nous des questions.
De plus, comme je te l'ai déjà dit, je ne souhaite pas répondre aux sollicitations privées (si c'est pour des questions qui peuvent être posées sur le forum), ça ne sert à rien de m'envoyer des questions en message privés.
Leon.
#15403 Gestion catpeur Ultra-son
Posté par
sur 11 avril 2010 - 07:48
dans
Programmation
Attention aux échos multiples. Si tu peux, rajoute une temporisation d'attente (~100ms) à la fin de chaque mesure.Si la vitesse d'exécution n'est pas primordiale tu peut faire une moyenne sur la réponse de ton capteur. Cela me semble bizarre que des interférences se manifeste pour ma part les miens sont très stables sur leurs réponses.
Leon.




