Super sujet, je souhaite aussi construire une CNC pendant ces vacances.
En fait, j'hésite entre prendre une X-Carve toute faite, et tenter de reproduire la même chose en achetant diverses pièces à droite à gauche.
Qu'en pensez vous?
Il y a 271 élément(s) pour sky99 (recherche limitée depuis 04-mai 13)
 Posté par
sur 21 mai 2016 - 06:38
dans
Machines de fabrication
Posté par
sur 21 mai 2016 - 06:38
dans
Machines de fabrication
Super sujet, je souhaite aussi construire une CNC pendant ces vacances.
En fait, j'hésite entre prendre une X-Carve toute faite, et tenter de reproduire la même chose en achetant diverses pièces à droite à gauche.
Qu'en pensez vous?
Posté par
sur 20 mai 2016 - 11:01
dans
Impression 3D et Imprimantes 3D
Non mais je m'en fout hein, pourquoi celle là ou une autre.
Tu demande un avis je te donne le miens.
Dans mon cas :
J'ai 350 * 350 * 400 de surface d'impression avec 2 têtes et je suis souvent limité, du coup de dois faire des pièces a monté entre elles.
Je l'ai payée 2000€ il y a 5 ans elle va toujours aussi bien et je n'ai aucun regret. Mais du coup je m’interroge sur les tarifs, sachant qu'a l'époque tu avais du bas de gamme à 900€.
Sans lit chauffant tu est obliger de faire preuve de beaucoup d'imagination pour sortir des pièces de plus de 50*50 en ABS d'où mon sourire sur les matériaux.
Enfin quand ils parlent de 3 paramètres pour sortir une pièce, là je ris... Tu vas rire aussi d’ailleurs.
Le carton est bien emballé et bien présenté.
Mais regarde la finition des pièces, les angles et l'apposition des couches sur l'axe Z.
Pour avoir de beaux angles et des belles couches uniformes tu dois commencé a jouer sur les températures et les vitesses d'impression.
Je dis ça par rapport au 3 paramètres dont ils parlent sur leur site.
Enjoy
A+
Ta surface d'impression est très importante, tout de même, les plus grande que je trouve dépassent rarement les 30cm dans une dimension.
par contre depuis 5 ans les prix ont baissé : ma printrbot simple metal coute maintenant 700€ environ avec lit chauffant (surface 15*15*15cm)
En plus gros, on monte vers 1000€ pour du 25*25*25cm, mais en mono tête.
Ceci dit, recemment, e3D à sorti la big box : environ 30*30*30, avec bien sur des e3D v6 comme extrudeuses, à environ 900€ et 1000€ en double tête, avec
un système de lit chauffant à zones multiple (tu peux chauffer le milieu seulement si ta pièce tient, ou le tout si nécéssaire, mais ça consomme plus et prend plus longtemps).
A l'heure actuelle, je crois que c'est ce que j'ai vu de mieux à ce prix (et ça rentre dans le top tout court, même pour des machines du double du prix!)
Et du coup moi ça me choque pas ce prix 
Posté par
sur 19 mai 2016 - 04:52
dans
Impression 3D et Imprimantes 3D
Le logiciel de l'imprimante indique la longueur de fil pour les modèles. Ça doit être pour ça
En fait, ce qui me fait tant hésiter, c'est ma capacité à utiliser les editeurs 3D. Vous vous en sortez comment pour faire du sur mesure avec un servo par exemple ? Genre il faut faire pleins d'essais ? Ou bien ça demande des compétences particuliaires ?
J'hésites encore avec l'achat d'une petite dremel et des planches de bois ^^ c'est pour dire.
Sans connaitre la machine, ni la boite qui la produit je me pose les question suivante:
- Quels sont les dimension des la zone imprimable ? J'imagine 200*200*200, si c'est le cas, c'est très très petit.
- Je m'interroge sur le prix, une machine de qualité à la concurrence coute entre 2 et 4 fois plus.
- La liste des matériaux imprimable me fait sourire surtout sans lit chauffant.
200*200*200, c'est loin d'être petit, les petites sont plutôt à 100*100*100.
Avec du 20cm de côté tu as déjà pas mal de surface de travail!
Pour le coût, il faut aussi faire attention : certains vendent très cher des produits de qualité médiocre, il y a parfois de grosses différences de prix sur les imprimantes 3D d'une même gamme.
Je ne dis pas que celle ci est forcément mieux que d'autres, mais le prix seul ne suffit pas. Par exemple, les makerbot récentes coûtent une fortune, et sont pourries...
Pour moi celle ci ressemble à une adaptation de la prussa i3, donc ça semble dans les prix. Maintenant, effectivement pour un truc vendu en france le prix est plutôt dans la tranche basse, mais ça arrive de plus en plus. En australie, Aldi a sorti une imprimante 3D de bonne facture, basée sur une I3 chinoise, à pas cher, et qui a eu un gros succès.
Pour les matériaux, je suis d'accord, sans lit chauffant on imprime surtout du PLA
Pour les nylons, le Tech-G passe bien pour moi, sans le lit chauffant, et le Alloy 910 aussi, de façon assez surprenante.
Le bridge a du warping, de même que le PCTPE.
Le T-Glase en revanche s'imprime nickel sans warping.
Pour ce qui est des filaments souples (autres que le PCTPE) le ninjaflex et le semiflex passent parfaitement sans lit chauffant.
Je n'ai jamais eu de warping avec ces matériaux, même minime!
Mais bon, pour moi quelqu'un qui commence devrait partir sur du PLA, surtout sans lit chauffant. Il y a déja pas mal de trucs à maitriser et comprendre sans rajouter un matériau complexe
Posté par
sur 18 mai 2016 - 04:09
dans
Impression 3D et Imprimantes 3D
Je viens de le voir
Sur leur forum, j'ai lu qu'il fallait faire les premiers réglages sans, pour ne pas l’abîmer.
Oui, c'est toujours une bonne idée, ça vaut bien 15-20€ la feuille de buildtak!
Mais c'est un signe, s'ils mettent ça, ainsi que la tête d'extrusion e3d V6, l'une des meilleures du marché,
ça fait deux éléments de très haute qualité, c'est un signe qu'ils sont partis sur de la qualité, et que
sans doute que le reste des éléments ont été choisis avec soin
Posté par
sur 18 mai 2016 - 07:35
dans
Impression 3D et Imprimantes 3D
Le logiciel de l'imprimante indique la longueur de fil pour les modèles. Ça doit être pour ça
En fait, ce qui me fait tant hésiter, c'est ma capacité à utiliser les editeurs 3D. Vous vous en sortez comment pour faire du sur mesure avec un servo par exemple ? Genre il faut faire pleins d'essais ? Ou bien ça demande des compétences particuliaires ?
J'hésites encore avec l'achat d'une petite dremel et des planches de bois ^^ c'est pour dire.
Pour ma part j'ai apris OpenSCAD, j'y ai passé une soirée, et j'avais modélisé ma première pièce complexe...
Maintenant il y a d'autres logiciels, sans code, tout en clic. Je vais m'intéresser à freecad, car je suis partisan
d'investir mon temps plutôt dans des logiciels libres et donc pérennes.
Une dremel, c'est très chouette, mais ce n'est pas du tout le même outil.
Il faut bien comprendre qu'avec une dremel, c'est ta technique qui influe le plus sur le résultat.
Avec une imprimante, comme toute machine à commande numérique, c'est la programmation de l'outil et sa qualité qui décident du résultat.
La programmation, sur l'imprimante 3D, tu n'en fais pas réellement, tu fais un modèle 3D, et si il est bien conçu il s'imprime bien.
Au bout d'un moment tu apprends à concevoir des pièces pratiques pour l'impression 3D. Je fais mes pièces aussi faciles à imprimer que possible
tant que ça ne nuit pas à la fonctionnalité.
La deuxième chose qui rentre en jeu, c'est le réglage des paramètres. Au début, tu verras, il y en a trente-douze, et tu ne sais pas trop ce que chacun fait
(n'hésite pas à demander, d'ailleurs), mais généralement tu charges un profil pour le matériau, et tu balances.
Au fur et à mesure que tu gagnes de l'expérience, tu comprends l'impact de tel ou tel param (et tu te rends compte que beaucoup sont
réglables, mais généralement on a pas besoin de toucher à la plupart).
Dès lors tu finis par cerner les paramètres essentiels (pour moi, hauteur de couche, vitesse de déplacement, épaisseur des parois, température d'extrusion et rétractation, les plus importants),
et tu fais quelques essais avec ton matériau, tu peaufines, jusqu'à avoir un profil "au poil", qui donne les meilleurs résultats.
Bien souvent tu trouves une vitesse correcte pour un filament, et le gros du réglage fin sera sur la température d'extrusion.
l'épaisseur des couches, ça dépendra de "je suis pressé, donc grosses couches", ou "je veux un truc super fin, même si ça prend des plombes".
Au passage, en dehors de réaliser les pièces soi même, il y a les dépots de modèles, comme thingiverse, ou on trouve des millions de pièces, donc par exemple pour des servos, y'a sans doute un type qui a modélisé la pièce de fixation.
Par contre quand il faut faire du sur mesure, modéliser une pièce unique, la il faudra mettre la main à la pâte
Posté par
sur 18 mai 2016 - 07:25
dans
Impression 3D et Imprimantes 3D
Salut Oracid, tu as craqué ?
Une question que je me pose : comment se comporte un imprimante à court de fil pendant une impression ? On recharge et elle repart où elle en était ?
Généralement, quand il y a un problème, l'imprimante ne sait pas, et tu t'en rends compte après, du coup il faut recommencer l'impression.
Pour le filament, quand tu arrives à court, l'imprimante bosse, mais dans le vide. Il existe des capteurs d'épaisseur de filament, ça a été intégré
au dernier firmware marlin, donc effectivement on devrait pouvoir ajouter une pause auto en cas de fin de filament.
Posté par
sur 16 mai 2016 - 11:27
dans
Autres projets inclassables
Au vu de vos réponses je vais rester prudent et réaliser une carte de commutation pour gérer la prise d'équilibrage.
Le truc le plus critique c'était de trouver un chargeur automatique, maintenant que c'est fait je suis "sauvé".
D'ailleurs, vous qui voyez passer pas mal de robot, vous avez connaissance d'autres robot alimenté par LiPo qui se recharge seul ?
Les miens le font (R.Ian et R.Hasika) mais encore une fois je suis en 1S. Ceci dit pour R.Hasika, je suis en 4P (j'ai assemblé
le pack moi même, avec 4 cellules 18650B pour 50Wh de capacité), mais toujours en 1S, donc en 3.7V. Pour la charge, je mets
N chargeurs 1A en parallèle (un pour chaque cellule 18650B), avec un système évitant aux chargeurs de charger autre chose que leurs cellulles.
(selon les spécifications, les chargeurs montent même à 1.2A). Du coup avec assez de courant en entrée, je devrais pouvoir charger un pack vide en moins de 3H.
Dans tous les cas, je prévois que le robot aille lui même sur sa base se charger.
Sinon, dans les robots commerciaux, il faudrait regarder du côté des robots aspirateurs. A mon fablab, on a un roomba, mais
malheureusement il est basé sur la techno NiMH (d'ailleurs j'ai pu voir la différence : j'ai plus de capacité avec un tiers du volume, et une fraction du poids, en LIPO...).
Posté par
sur 16 mai 2016 - 05:43
dans
Autres projets inclassables
Et du coup si le pc utilise les 2 à la fois, ca entraine des minis cycles de charge en permanence et réduit quand meme un peu la duré de vie non?
Si le PC tourne,et que la batterie est chargée, elle reste chargée, et le courant passe directement au PC, sans user la batterie, à moins d'un circuit bas de gamme
A part ça, serais-ce possible de revenir au sujet principal de ce fil siouplait ?
Oui, désolé
Mais pour moi c'est tout bon pour ton projet.
Ton chargeur est branché aux batteries, et il ne fait rien.
Quand tu branches l'alim secteur du chargeur, il charge les batteries.
Selon sa qualité il peut alimenter le robot en même temps ou pas, mais il ne doit poser aucun problème s'il est juste branché sur la batterie pendant que le robot tourne!
Posté par
sur 16 mai 2016 - 09:20
dans
Autres projets inclassables
Me dis pas qu'on t'a jamais dit qu'il fallait enlever la batterie de ton ordi quand tu travaillais sur secteur ?
Salut,
C'est totalement inutile de faire cela : le chargeur va maintenir la batterie chargée, en faisant de mini charges lorsque nécessaire. Quand la batterie est chargée, le courant passe à la carte mère, et donc la batterie ne s'use pas. La seule raison d'enlever la batterie de son ordinateur pour travailler sur secteur serait que celle ci est défectueuse, et qu'elle chauffe excessivement, ou fait d'autres trucs anormaux. Mais dans ce cas là, il vaudrait mieux la retirer... tout court!
Mes deux derniers ordis portables ont passé à peu près tout leur temps branché, sans soucis. De même, tous mes téléphones ont passé la majeure partie de leur vie branchés, sans soucis...
Un moyen de vérifier que le circuit de charge est correct : quand l'ordi/téléphone/machin alimenté par lipo est pleinement chargé, si la batterie est moins chaude que pendant que l'appareil se charge (depuis un taux de charge inférieur à 100% bien sur), alors c'est que la batterie n'est pas sollicitée.
Une solution consiste également à charger à 1/2C ou moins, ce qui génère moins de chauffe, donc moins d'usure, etc.
A ne pas oublier de prendre en compte :
Posté par
sur 15 mai 2016 - 06:15
dans
Autres projets inclassables
Salut!
Merci également pour les liens, je vais me pencher dessus!
J'ai également lu que charger la batterie à fond réduit plus vite sa durée de vie, charger à 4.1V au lieu de 4.2 permettrait de doubler le nombre de cycles, et ainsi de suite jusqu'à 3.9, qui d'après battery university serait le point optimal, mais à 3.9 on a diminué de 30% la capa de la batterie.
Du coup batterie avec une longue durée sur une charge, ou alors plus faible mais avec plus de cycles de charges décharges, il faut choisir!
J'imagine qu'un facteur primordial doit être le circuit de charge lui même (en dehors bien sur la qualité des cellules) : est-ce qu'il surveille la température pour baisser le courant si nécéssaire? à quel point son voltmètre est précis, pour mesurer la tension de la batterie? à quel point le tout est bien calibré?
Si ça se trouve un plus mauvais chargeur chauffera, donc pourrait sortir moins de courant, et ainsi charger plus lentement, mais en échange moins stresser la batterie?
Je me dis qu'il faudrait que je fasse des tests! Je me demande si le fait d'avoir une plaque de metal en contact des batteries ne peut pas servir de dissipateur et maintenir une meilleure température...
Posté par
sur 15 mai 2016 - 03:56
dans
Autres projets inclassables
Ah, c'est une très bonne nouvelle ça, aurais-tu une ou plusieurs référence s'il te plaît ? J'ai cherché sur le site hobbyking et j'ai fait choux blanc :s (Mon pack serait un 4s)
quand je disais laisser la prise d'équilibrage branchée en permanence c'était pour commuter facilement les fils principaux du pack (le noir et rouge) entre le chargeur et le robot. Du coup si je laisse juste la prise d'équilibrage branchée mais pas les 2 bornes de charges/décharge c'est pareil que ce que tu évoquais plus haut ?
Merci pour votre aide!
SI tes fils de charge sont branchés sur la batterie, mais derrière, connectés à rien, tu n'auras pas de problème.
D'autre part, normalement, avec un bon chargeur, tu ne devrais pas avoir de problème à charger même lorsque le robot consomme du courant sur la batterie.
Je l'ai fait pour certains montages, avec des circuits de charge branchés sur la batterie, et le système consommateur également connecté.
Par contre dans mon cas, c'était un ensemble de batteries 1S. Et dans tous les cas, j'ai fait des recherches pour vérifier que le chargeur le supporte bien.
Mais d'après ce que j'ai compris, tu comptes de toutes façons brancher la prise d'équilibrage au chargeur, et ne pas alimenter le chargeur, mais le laisser là, dans ton montage, pour avoir juste un truc à brancher. Dans ce cas, si ton chargeur est bien conçu, pas de problème. Le problème qui pourrait survenir serait que du courant aille vers le chargeur, et donc que celui ci gaspille un peu d'énergie. Mais normalement, rien de grave.
Posté par
sur 15 mai 2016 - 03:50
dans
Autres projets inclassables
Bonjour,
Désolé de te contredire, Mike, mais ce dont tu parles n'est pas valable pour les batteries Lithium. C'était le cas pour les NiCD ou certaines NiMH à effet mémoire, mais pas pour les batteries lithium.
De même que pour les ordis portables et téléphones portables, j'ai eu des laptops branchés en permanance, avec toujours de très courtes décharges puis recharge imédiates, qui ont toujours une batterie en bon état alors que d'autres qui ont réellement été déchargés ont au contraire perdu en capa de batterie en bien moins de temps.
Cela dépend aussi bien sur de la qualité de la batterie, de la température, etc.
Mais dans tous les cas, j'ai une source qui confirme :
http://batteryuniversity.com/learn/article/how_to_prolong_lithium_based_batteries
je cite :
"A partial discharge reduces stress and prolongs battery life. Elevated temperature and high currents also affect cycle life."
Sur le tableau 2 de cette page, on voit le nombre de charges effectués en fonction du taux de décharge.
Ils indiquent 300 à 500 pour des décharges complètes, à 100%, 1200 à 1500 pour des décharges à 50%,
et 3700 à 4700 quand on ne décharge que 10% de la batterie.
C'est logique, et ça se tient, car quand une batterie lithium s'use c'est à cause d'une réaction à l’intérieur
de la batterie qui modifie sa chimie. Cette réaction est progressive, et se fait quand on charge et décharge.
Plus je charge longtemps, et plus je décharge longtemps, plus la réaction se réalise.
Du coup, au contraire, pour une longue durée de vie d'un système, si l'on surdimensionne la batterie, on peut
tenir plus longtemps sans avoir à la changer!
Cela dépend aussi bien sur de la qualité de la batterie, de la température, etc.
Mais dans tous les cas, j'ai une source qui confirme :
Posté par
sur 15 mai 2016 - 03:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Conception paramétrique dans OpenScad
Tout comme pour R.Ian, un autre robot fabriqué à l'imprimante 3D, le châssis de R.Hasika a été conçu de façon paramétrique avec Openscad. La conception paramétrique signifie en pratique que l'on peut modifier facilement certains éléments du robot en changeant quelques variables dans le script décrivant le châssis. Un outil de visualisation permet de vérifier le résultat, et on peut alors facilement imprimer sa version modifiée du châssis! Voici un exemple de ce que permet cette conception paramétrique :
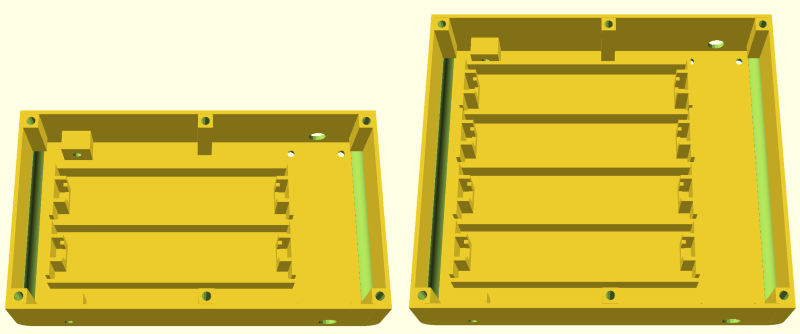
Sur cet exemple, en modifiant une variable, on peut facilement passer de 2 emplacements de batteries à 4, en élargissant le châssis de façon adéquate. On pourra ajuster de très nombreux autres paramètres, ce qui fera probablement l'objet d'un billet séparé, détaillant ce qui peut être modifié, et comment le faire.
Quoi qu'il en soit, pour la fabrication, c'est simple, puisqu'il suffit de télécharger le fichier stl du châssis, et de le fabriquer à l'imprimante 3D avec un matériau solide, tel que le PLA, l'ABS, ou encore certains nylons. Puisque la fabrication est faite par une machine, on aura des côtes précises, des trous bien positionnés, etc... Cela remplit donc notre objectif de précision par la même occasion.
De même, puisque le châssis est fait d'un seul tenant, il n'y a pas d'assemblage à faire pour les pièces structurelles, et donc on a une bonne solidité et une importante rigidité de l'ensemble, ce qui permet d'atteindre notre objectif de solidité.
Dans le prochain post, nous reviendrons aux fonctionnalités du châssis en lui même.
Posté par
sur 15 mai 2016 - 03:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Maintenant, nous décrirons la conception du châssis de R.Hasika, présenté dans les précédents billets (ou ici sur mon blog), et dont voici la page de projet. Le châssis du robot est un élément important, puisqu'il lui conférera sa solidité, mais aussi une partie de ses capacités finales. En pratique, un bon châssis permettra un robot précis, du fait du positionnement exact des composants. Le châssis de R.Hasika est monocoque, en une seule pièce, fait pour être construit à l'imprimante 3D. Détaillons maintenant sa conception et les fonctionnalités qu'il apporte.
Objectifs de conception du châssis de R.Hasika
Sur R.Cerda, le robot qui a précédé R.Hasika, le châssis était une simple planche de bois, sur laquelle venaient se fixer les divers éléments. Il en a résulté un assemblage peu précis, et des ajustements très "bricolés" de certains éléments, sans compter un robot assez gros pour ce qu'il permettait de faire. Cette fois ci, pour le châssis de R.Hasika, j'ai souhaité passer davantage de temps à la phase conception pour produire un châssis répondant à toutes les problématiques rencontrées pendant l'assemblage du robot :
En plus de ces points s'ajoutent quelques avantages apportés par ce châssis, tels que la capacité de franchissement ou une certaine résistance à l'eau. Voyons maintenant la conception de ce châssis, et tout au long de cet article nous verrons les concepts mis en oeuvre pour remplir les objectifs décrits plus haut.
Posté par
sur 11 mai 2016 - 12:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut!
je pense que pour l'instant, c'est mon robot le plus évolué, j'en suis assez fier
Par contre, même si j'ai pu le faire fonctionner, il reste encore du boulot, car il y a PLEIN de choses planifiées
Posté par
sur 11 mai 2016 - 01:00
dans
Robots roulants, chars à chenilles et autres machines sur roues
R.Hasika embarque divers autres éléments que nous ne détaillerons pas tous ici. Mais en voici quelques uns :
Posté par
sur 11 mai 2016 - 12:59
dans
Robots roulants, chars à chenilles et autres machines sur roues
Electronique de commande
Pour l'électronique de commande de ce robot, on s'appuie tout d'abord sur un Arduino nano, chargé des tâches de bas niveau (commande des moteurs, lecture des capteurs, contrôle des LEDs et boutons, etc). Le robot peut être programmé directement via le Arduino, en ignorant le reste.

Mais cet Arduino est connecté par un port série à un Raspberry pi A+, qui permet cette fois de s’intéresser à des tâches plus complexes, telle que la cartographie, le traitement d'information vidéo, les communications wifi, etc. Si on ne souhaite pas s'occuper de la programmation des tâches de bas niveau, il suffit de téléverser le code fourni avec le projet sur l'Arduino et de communiquer avec celui ci depuis le Raspberry pi via un port série pour envoyer des commandes.
Posté par
sur 07 mai 2016 - 07:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
Capteurs
Les capteurs de base embarqués sont deux microswitches à levier, qui servent de capteurs de contact, un capteur de distance à ultrasons maxbotix, et les capteurs de rotation des roues. Si ces derniers permettent des trajectoires et mouvements précis, les deux premiers servent à mettre en oeuvre des algorithmes d'évitement d'obstacles.
D'autres capteurs viendront probablement s'ajouter à ces capteurs, avec par exemple un module accéléromètre, boussole et gyroscope 3D.
Un capteur particulier prendra place à coup sur, en revanche, avec le module caméra du Raspberry pi. Celui ci permet une capture vidéo en fullHD (1920*1080) à 30 images par secondes et des photos à 5Mpixels, voire 8 pour la nouvelle version. Une version infrarouge existe également.
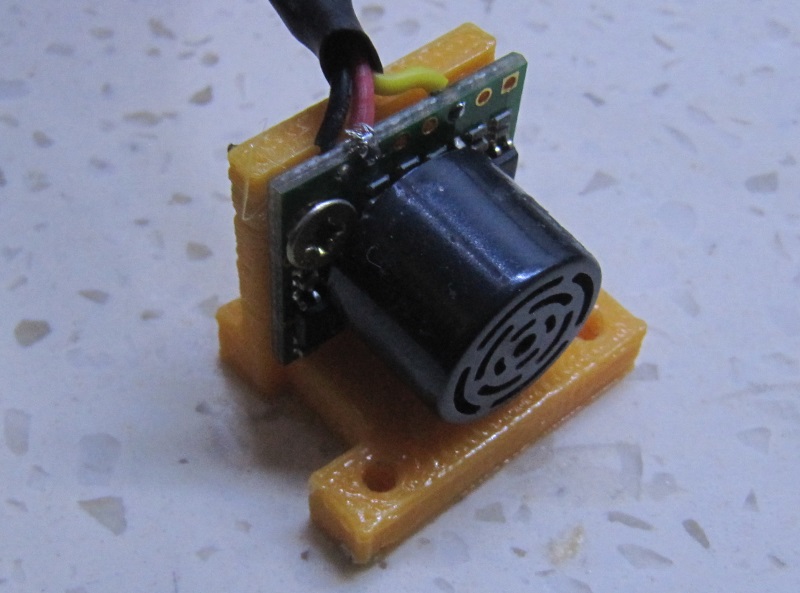
Le capteur ultrasonique maxbotix sur son support imprimé.
Posté par
sur 05 mai 2016 - 09:58
dans
Impression 3D et Imprimantes 3D
Comme toi alu. J'utilise de la colle Uhu, ça marche bien et c'est pas cher.
Et tu n'as jamais essayé le blue tape?
C'est simple, et il n'y a pas besoin de faire quoi que ce soit d'autre.
Tu recouvres la surface de scotch papier de peintre, et tu imprimes.
Quand le scotch est abimé, tu l'enlèves et le changes. Pas besoin de
nettoyer ou quoi que ce soit, et ça fonctionne à froid
Posté par
sur 05 mai 2016 - 09:57
dans
Impression 3D et Imprimantes 3D
Oui, l'axe X est fait par un stepper sur la base,
l'axe Y est fait par un second stepper sur le bras,
et l'axe Z est fait par un troisième stepper en dessous, qui fait tourner la vis pour faire monter descendre.
C'est un design courant pour les imprimantes 3D : une base qui bouge de gauche à droite (ou avant-arrière),
un portique qui monte et descend et sur lequel il y a une tête qui bouge le long du portique.
Sur la printrbot l'originalité est que le portique est supporté d'un seul côté.
Posté par
sur 05 mai 2016 - 07:06
dans
Impression 3D et Imprimantes 3D
Merci Levend pour ces informations, je ferai attention, dorénavant.
Je pense me diriger vers le nylon. J'ai déjà fait faire quelques pièces et je trouve que son élasticité et sa robustesse sont intéressantes.
Cherches bien, car tous les nylons ne sont pas faciles à imprimer, ni assez rigides pour des éléments de structure.
Et à mon avis, c'est toujours bien d'avoir du PLA pour commencer, car c'est pas cher et facile à imprimer tout en étant rigide
Posté par
sur 04 mai 2016 - 11:28
dans
Impression 3D et Imprimantes 3D
Le PLA sans lit chauffant, c'est pas automatique. Avec celui que j'ai je doit chauffer le lit à 60° pour que ça colle dessus.
Mais tu as quoi comme surface?
En tous cas pour ma part, je mets du blue tape (adhésif bleu de peintre en papier), et ça colle tellement fort que c'est parfois chiant à décoller!
Et j'ai imprimé sur au moins 8-10 rouleaux différents de PLA (je ne les ai pas épuisés, mais j'en ai essayé plein), et je n'ai jamais eu de problème d'adhésion.
La seule fois ou je n'ai pas eu une bonne adhésion, c'est quand j'ai essayé sans le scotch bleu!
Donc sans rien sur le lit (le mien est en alu), ça colle pas, mais sur le scotch bleu ça adhere bien, pour moi.
Mais sinon ici, au pire il a une feuille de buildtak. C'est très efficace comme surface, au point que certains
arrivent à faire de l'impression d'ABS sans lit chauffant avec, sans warping excessif!
Posté par
sur 04 mai 2016 - 11:16
dans
Robots roulants, chars à chenilles et autres machines sur roues
Alimentation électrique et autonomie
L'alimentation électrique se fait par le biais de batteries lithium (jusqu'à 4), qui fournissent une capacité de 50Wh, permettant ainsi au robot de dépasser les 24 heures d'autonomie hors déplacement. En déplacement on obtiendra facilement de nombreuses heures d'autonomie.
Un autre point intéressant avec ces batteries est qu'elles permettent d'intégrer au robot un circuit de charge, permettant de le recharger sans retirer les batteries. Mieux, on peut recharger le robot sans l'éteindre. Encore mieux, cela nous permet de programmer le robot pour qu'il aille se charger seul sur une station dédiée.


Posté par
sur 04 mai 2016 - 07:14
dans
Impression 3D et Imprimantes 3D
Le plexi convient pour une des formes d'écrans envisagée mais pas pour l'autre.
Ne t'inquiète pas c'est juste un rêve que j'essaie de voir sa faisabilité, je n'ai pas vraiment la possibilité de le réaliser, mais je me renseigne au passage.
Salut, voici le rendu en T-Glase :
La pièce rectangulaire est creuse, donc ce que tu vois c'est la transparence avec deux parois, et l'anneau à une épaisseur plus réduite.
On peut sans doute faire mieux, mais même deux fois plus transparent, ça ne sera pas comme du plexi ou du verre.
Au mieux, un effet un peu vitrail...
Posté par
sur 04 mai 2016 - 07:12
dans
Impression 3D et Imprimantes 3D
Salut, du coup sans le plateau chauffant il vaut mieux prendre des matériaux compatibles.
Du coup les PLA sont très bien, avec le gros avantage de ne pas puer pendant l'impression.
C'est super dur/solide,par contre quand ça casse, c'est d'un coup, un peu comme du verre.
Pour ma part je m'en sers tout le temps, pour un peu tous mes travaux robotique.
Par contre, ça ne tient pas bien la chaleur. Sous le soleil de Guadeloupe, une boite en PLA marron
(pas la meilleur couleur non plus pour résister au soleil ^^) est devenue molle, je pouvais déformer
le couvercle.
Pourtant j'avais fait des essais avec un PLA orange, qui a bien tenu au soleil, mais bon, que ce soit
ce rouleau marron ou pas, le PLA n'est pas réputé résister à de très hautes températures.
Aux alentours de 60°C il commencera à ramollir!
Si tu veux imprimer des matériaux plus résistants, il faudra sans doute se tourner vers les nylons, jusqu'ici
j'ai de bons résultats avec le nylon bridge (un peu souple quand même) et le T-Glase (plus rigide) sans lit chauffant.
je dois faire davantage de tests avec le Alloy910 et le techG, des filaments solides qu'on pourrait potentiellement
imprimer sans lit chauffant.






