
J'avais pas fais gaffe que des robots se nommaient déjà comme sa, tant pis, je trouverai un autre nom, mais après sa c'est un détail !
Il y a 60 élément(s) pour Valent81320 (recherche limitée depuis 18-juillet 14)
 Posté par
sur 27 mai 2012 - 01:44
dans
Archives
Posté par
sur 27 mai 2012 - 01:44
dans
Archives
Posté par
sur 26 mai 2012 - 11:32
dans
Archives
Posté par
sur 26 mai 2012 - 09:44
dans
Archives
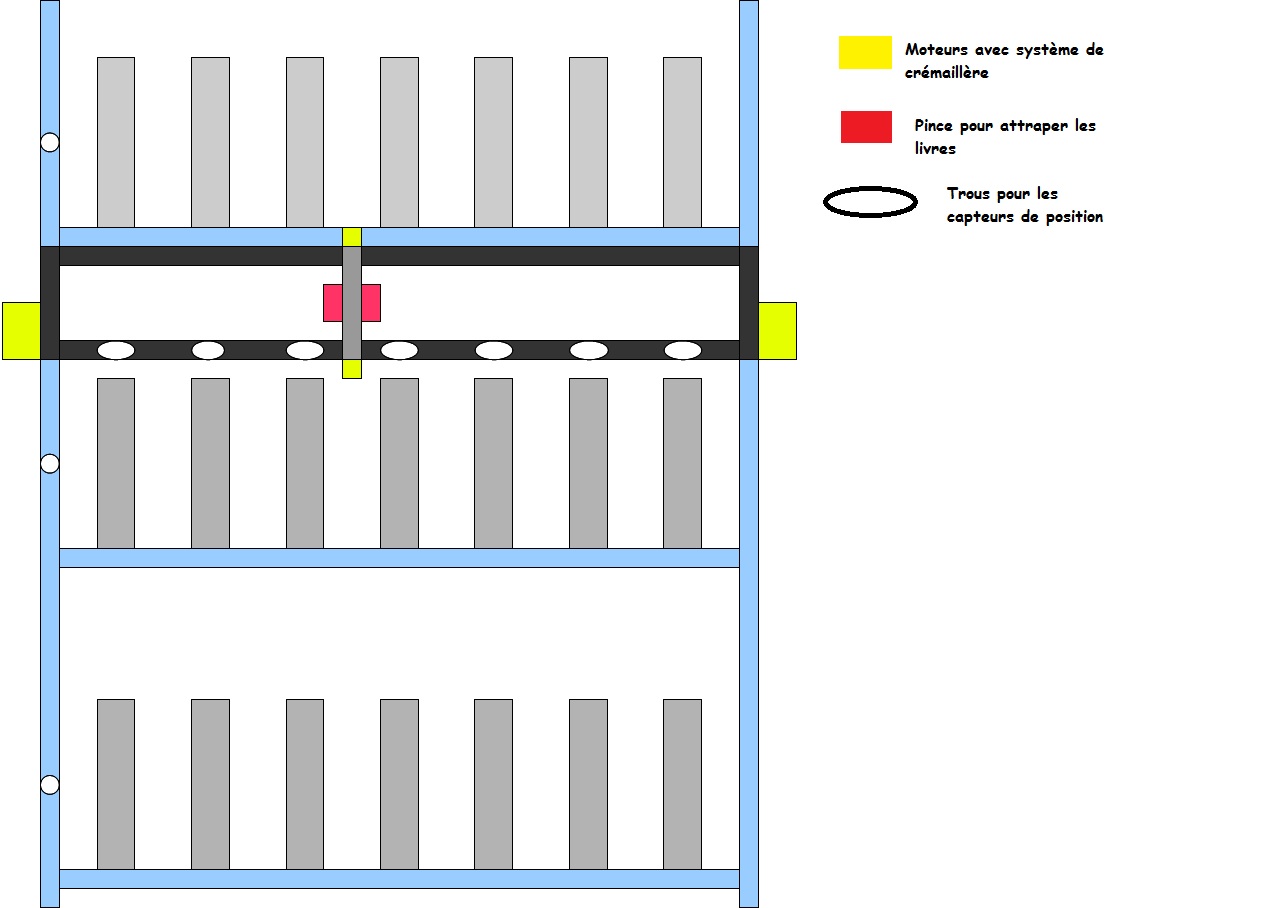
 après, je me demandais quel type de moteur il me faudrait : un truc pas trop cher, pouvant être contrôlé par Arduino, et qui avance un peu quand même, histoire de pas mettre trois ans à aller chercher un livre ... Mais je mettrai bientôt un schéma histoire que vous puissiez voir comment j'aimerai concevoir mon projet !!
après, je me demandais quel type de moteur il me faudrait : un truc pas trop cher, pouvant être contrôlé par Arduino, et qui avance un peu quand même, histoire de pas mettre trois ans à aller chercher un livre ... Mais je mettrai bientôt un schéma histoire que vous puissiez voir comment j'aimerai concevoir mon projet !!
Posté par
sur 25 mai 2012 - 06:45
dans
Archives
Posté par
sur 24 mai 2012 - 10:06
dans
Archives
Posté par
sur 14 avril 2012 - 08:37
dans
Programmation
Posté par
sur 14 avril 2012 - 09:27
dans
Programmation
Posté par
sur 13 avril 2012 - 06:36
dans
Programmation
Posté par
sur 09 avril 2012 - 08:47
dans
Programmation
Posté par
sur 09 avril 2012 - 10:19
dans
Programmation
Posté par
sur 09 avril 2012 - 09:16
dans
Programmation
Posté par
sur 08 avril 2012 - 07:18
dans
Programmation
Posté par
sur 08 avril 2012 - 02:34
dans
Programmation
#include <stdlib.h>
#include <stdio.h>
#include <Metro.h>
#include <LiquidCrystal.h>
const int RS=12;
const int E=11;
const int D4=5;
const int D5=4;
const int D6=7;
const int D7=6;
LiquidCrystal lcd(RS, E, D4, D5, D6, D7);
Metro ledMetro = Metro(3000);
int pos_rad_BP;
int pos_deg_BP;
int pos_rad1_BP;
int pos_deg1_BP;
int vitesse_BP;
int vitesse;
int pos_rad;
int pos_deg;
int pos_deg1;
int pos_rad1;
int nbre_impulsion;
int nbre_impulsion1;
int nbre_impulsion_vitesse;
volatile int front_montant = LOW;
int BPState = 8;
void setup() // fonction setup - début de l'exécution du programme
{
Serial.begin(9600);
lcd.begin(20,4);
attachInterrupt(0, counter, RISING);
attachInterrupt(1, positionBP, RISING);
pinMode(BPState, INPUT);
lcd.setCursor(0,0);
lcd.print(" PROJET DE PPE ");
lcd.setCursor(0,1);
lcd.print(" 2011 - 2012 ");
lcd.setCursor(0,2);
lcd.print(" PUJOL-STOECKLIN ");
lcd.setCursor(0,3);
lcd.print(" SYLVAIN-WOZNIAK ");
delay(4000);
lcd.clear();
delay(10);
}
void counter()
{
++nbre_impulsion;
++nbre_impulsion1;
++nbre_impulsion_vitesse;
}
void positionBP()
{
pos_rad_BP = pos_rad;
pos_deg_BP = pos_deg;
vitesse_BP = vitesse;
pos_rad1_BP = pos_rad1;
pos_deg1_BP = pos_deg1;
}
void loop()
{
lcd.clear();
int BP = digitalRead(8);
if (BP == HIGH)
{
while (pos_deg <= 90)
{
lcd.clear();
if (ledMetro.check() != 1)
{
vitesse = ((nbre_impulsion_vitesse*(3.14/2)/90)/2)*1000;
pos_rad = (nbre_impulsion*(3.14/2)/90)*1000;
pos_deg = nbre_impulsion;
lcd.setCursor(0,0);
lcd.print("POS DEG: ");
lcd.setCursor(10,0);
lcd.print(pos_deg);
lcd.setCursor(0,1);
lcd.print("POS MRAD: ");
lcd.setCursor(10,1);
lcd.print(pos_rad);
lcd.setCursor(0,2);
lcd.print("vitesse :");
lcd.setCursor(10,2);
lcd.print(vitesse);
}
if (ledMetro.check() == 1)
{
nbre_impulsion_vitesse = 0;
lcd.clear();
delay(100);
}
}
while (pos_deg >= 90)
{
lcd.setCursor(0,0);
lcd.print("POS DEG BP: ");
lcd.setCursor(14,0);
lcd.print(pos_deg_BP);
lcd.setCursor(0,1);
lcd.print("POS MRAD BP: ");
lcd.setCursor(14,1);
lcd.print(pos_rad_BP);
lcd.setCursor(0,2);
lcd.print("vitesse BP:");
lcd.setCursor(14,2);
lcd.print(vitesse_BP);
delay (100);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("POS DEG BP: ");
lcd.setCursor(14,0);
lcd.print(pos_deg_BP);
lcd.setCursor(0,1);
lcd.print("POS MRAD BP: ");
lcd.setCursor(14,1);
lcd.print(pos_rad_BP);
lcd.setCursor(0,2);
lcd.print("vitesse BP:");
lcd.setCursor(14,2);
lcd.print(vitesse_BP);
delay (15000);
lcd.clear();
}
}
if(BP == LOW)
{
pos_deg1 = 90-(nbre_impulsion);
while (pos_deg1 > 0)
{
lcd.clear();
if (ledMetro.check() != 1)
{
vitesse = ((nbre_impulsion_vitesse*(3.14/2)/90)/2)*1000;
pos_rad1 = ((3.14/2)-(nbre_impulsion*(3.14/2)/90))*1000;
pos_deg1 = 90-nbre_impulsion;
lcd.setCursor(0,0);
lcd.print("POS DEG: ");
lcd.setCursor(10,0);
lcd.print(pos_deg1);
lcd.setCursor(0,1);
lcd.print("POS MRAD: ");
lcd.setCursor(10,1);
lcd.print(pos_rad1);
lcd.setCursor(0,2);
lcd.print("vitesse :");
lcd.setCursor(10,2);
lcd.print(vitesse);
}
if (ledMetro.check() == 1)
{
nbre_impulsion_vitesse = 0;
lcd.clear();
delay(100);
}
}
while (pos_deg1 <= 0)
{
lcd.setCursor(0,0);
lcd.print("POS DEG BP: ");
lcd.setCursor(14,0);
lcd.print(pos_deg1_BP);
lcd.setCursor(0,1);
lcd.print("POS MRAD BP: ");
lcd.setCursor(14,1);
lcd.print(pos_rad1_BP);
lcd.setCursor(0,2);
lcd.print("vitesse BP:");
lcd.setCursor(14,2);
lcd.print(vitesse_BP);
delay (100);
lcd.clear();
lcd.setCursor(0,0);
lcd.print("POS DEG BP: ");
lcd.setCursor(14,0);
lcd.print(pos_deg1_BP);
lcd.setCursor(0,1);
lcd.print("POS MRAD BP: ");
lcd.setCursor(14,1);
lcd.print(pos_rad1_BP);
lcd.setCursor(0,2);
lcd.print("vitesse BP:");
lcd.setCursor(14,2);
lcd.print(vitesse_BP);
delay (15000);
lcd.clear();
}
}
}
Posté par
sur 29 février 2012 - 10:49
dans
Electronique
Posté par
sur 29 février 2012 - 10:40
dans
Programmation
Posté par
sur 29 février 2012 - 10:34
dans
Archives
Oui je veux bien
Posté par
sur 28 février 2012 - 09:01
dans
Archives
Posté par
sur 28 février 2012 - 08:59
dans
Archives
Posté par
sur 27 février 2012 - 05:42
dans
Archives
Posté par
sur 27 février 2012 - 05:41
dans
Archives
Voila un exemple d'un morceaux de programme pour un bouton poussoir , ça peux te servir je pense.
int LED = 13; // choisir la broche pour la LED int BOUTON = 3; // Branchez le bouton poussoir a la broche 3 broches digital void setup() { pinMode(LED, OUTPUT); // déclare la LED en ( sortie ) pinMode(BOUTON, INPUT); // déclare le bouton-poussoir en ( d'entrée ) } void loop(){ val = digitalRead(BOUTON); // lire la valeur d'entrée if (val == HIGH) { // vérifier si l'entrée est ( HAUTE ) digitalWrite(LED, LOW); // LED OFF ( BASSE ) } else { digitalWrite(LED, HIGH); // LED ON ( HAUTE ) } }
Je tes détaller le code pour que tu comprène .
Posté par
sur 24 février 2012 - 06:50
dans
Archives
#include <stdlib.h>
#include <stdio.h>
#include <Metro.h> // librairie remplacant la librairie <time.h>
#include <LiquidCrystal.h>
const int RS=12;
const int E=11;
const int D4=5;
const int D5=4;
const int D6=3;
const int D7=6;
int BP1State = 13; //BP1 branché sur la patte 13 (digitale), il en est de meme pour les autres boutons poussoir.
int BP3State = 8;
int BP4State = 9;
int BP5State = 10;
LiquidCrystal lcd(RS, E, D4, D5, D6, D7);
Metro ledMetro = Metro(2000); //temps d'une boucle, ici 2sec.
int nbre_impulsion;
int nbre_impulsion_vitesse;
volatile int front_montant = LOW;
void setup() // fonction setup - début de l'exécution du programme
{
Serial.begin(9600);
attachInterrupt(0, counter, RISING); //fonction permettant dincrémenter le nbre_impulsion, avec la patte digitale de mon codeur branché sur l'entrée 3 digitale
pinMode(BP1State,INPUT); // déclaration de mes BP en tant que entrée
pinMode(BP3State,INPUT);
pinMode(BP4State,INPUT);
pinMode(BP5State,INPUT);
digitalWrite(BP1State, HIGH); // je ne sais plus pourquoi j'ai mis ces fonctions, je l'avais vu dans un autre programme ... peut être pour tester les BP
digitalWrite(BP3State, HIGH);
digitalWrite(BP4State, LOW);
digitalWrite(BP5State, LOW);
lcd.begin(20,4); // propriété de mon écran lcd : 20 caractère et 4 lignes
lcd.print("LCD OK"); // test du lcd
delay(2000);
lcd.clear();
delay(10);
}
void counter() //ici donc ma fonction, ou macro incrémentant le nbre_impulsion
{
++nbre_impulsion;
++nbre_impulsion_vitesse; // cette variable est nécéssaire, car contrairement, a nbre_impulsion, il ne se réinitialise pas en fin de boucle ledMetro.check
}
void loop()
{
int pos_rad;
int pos_deg;
int vitesse;
int vitesse_BP1;
int position_BP1_rad;
int position_BP1_deg;
int nbre_impulsion_vitesse;
int pos_deg1;
int pos_rad1;
while (digitalRead(BP3State) == HIGH); // tant que je n'appuie pas sur ce bouton, ici, il sert en gros a bouton d'arret d'urgence quoi ...
{
if (digitalRead(BP4State) == HIGH); // cet interrupteur indique s'il est actionné que le portail partira en position fermée
{
while (pos_deg < 90)
{
lcd.clear();
if (ledMetro.check() != 1) //si le temps est different de 2sec.
{
if (digitalRead(BP1State) == LOW); // si l'on appuie sur ce BP, alors on enregistre la position et la vitesse a ce moment
{
vitesse_BP1 = vitesse;
position_BP1_rad = pos_rad;
position_BP1_deg = pos_deg;
}
pos_rad = nbre_impulsion*(3.14/2)/90; // calculs pour avoir les position en radian, degré et la vitesse, précision : mon codeur envoie 1 impulsion par degré
pos_deg = nbre_impulsion;
vitesse = vitesse = (nbre_impulsion_vitesse*(3.14/2)/90)/2;
lcd.setCursor(0,0); // on affiche la position et la vitesse
lcd.print("POS DEG: ");
lcd.setCursor(9,0);
lcd.print(pos_deg);
lcd.setCursor(0,1);
lcd.print("POS RAD: ");
lcd.setCursor(9,1);
lcd.print(pos_rad);
lcd.setCursor(0,2);
lcd.print("vitesse: ");
lcd.setCursor(9,2);
lcd.print(vitesse);
}
if (ledMetro.check() == 1) // on efface toute les 2sec.
{
lcd.clear();
delay(100);
}
}
if(pos_deg >= 90) // quand la position en degré est égale a 90, ou un peu supérieure, alors on arrete, puisque le portail ne bouge plus
{
lcd.clear();
delay(10);
lcd.print("INFORMATIONS AU");
lcd.setCursor(0,1);
lcd.print("POINT VOULU");
delay(2000);
lcd.clear();
delay(10);
lcd.setCursor(0,0); // on affiche à ce moment la la vitesse et la position au moment ou l'on avais appuyé sur BP1
lcd.print("vit. BP1: ");
lcd.setCursor(10,0);
lcd.print(vitesse_BP1);
lcd.setCursor(0,1);
lcd.print("POS DEG BP1:");
lcd.setCursor(12,1);
lcd.print(position_BP1_deg);
lcd.setCursor(0,2);
lcd.print("POS RAD BP1:");
lcd.setCursor(12,2);
lcd.print(position_BP1_rad);
delay(100000000);
}
}
if (digitalRead(BP5State) == HIGH); //si BP5 est appuyé, c'est que le portail part en position ouverte, les calculs de positions sont donc différents
{
while (pos_deg1 > 0) // quand il finira de bouger, la position sera de 0
{
lcd.clear();
if (ledMetro.check() != 1)
{
pos_rad1 = (3.14/2)-(nbre_impulsion*(3.14/2)/90);
pos_deg1 = 90-nbre_impulsion;
vitesse = vitesse = (nbre_impulsion_vitesse*(3.14/2)/90)/2;
lcd.setCursor(0,0);
lcd.print("POS DEG: ");
lcd.setCursor(9,0);
lcd.print(pos_deg1);
lcd.setCursor(0,1);
lcd.print("POS RAD: ");
lcd.setCursor(9,1);
lcd.print(pos_rad1);
lcd.setCursor(0,2); // pour le reste, tout est pareil que quand BP4 est actionné au lieu de BP5
lcd.print("vitesse: ");
lcd.setCursor(9,2);
lcd.print(vitesse);
if (digitalRead(BP1State) == LOW);
{
vitesse_BP1 = vitesse;
position_BP1_rad = pos_rad1;
position_BP1_deg = pos_deg1;
}
}
if (ledMetro.check() == 1)
{
lcd.clear();
delay(100);
}
}
if (pos_deg <= 0)
{
lcd.print("INFORMATIONS AU");
lcd.setCursor(0,1);
lcd.print("POINT VOULU");
delay(2000);
lcd.clear();
delay(10);
lcd.setCursor(0,0);
lcd.print("vit. BP1: ");
lcd.setCursor(10,0);
lcd.print(vitesse_BP1);
lcd.setCursor(0,0);
lcd.print("POS DEG BP1:");
lcd.setCursor(12,1);
lcd.print(position_BP1_deg);
lcd.setCursor(0,2);
lcd.print("POS RAD BP1:");
lcd.setCursor(12,2);
lcd.print(position_BP1_rad);
delay(100000000);
}
}
}
if (digitalRead(BP3State) == LOW)
{
lcd.print("! Recommencez !"); // si on a appuyé sur BP3, ce message s'affiche, et le programme doit etre redémarré.
delay(10000000);
}
}
Posté par
sur 24 février 2012 - 09:44
dans
Archives
Posté par
sur 23 février 2012 - 11:17
dans
Archives
Posté par
sur 23 février 2012 - 11:17
dans
Archives
Posté par
sur 16 février 2012 - 05:23
dans
Programmation




