 Posté par
Posté par
Bonjour,
ça pourrait intéressé certains qui aime bien faire des pièces à la main. Je voulais adapté une pièce imprimé en 3D sur une pièce déjà existante (imprimé un logo pour le volant de ma voiture). Du coup en plus de prendre les cotes, j'ai voulu le scanner via photogrammétrie. J'ai essayé 3DF Zephyr en gratuit.
Avec mon volant gris anthracite le résultat a été moyen mais avec une pièces aux couleur plus contrasté ça marche mieux.
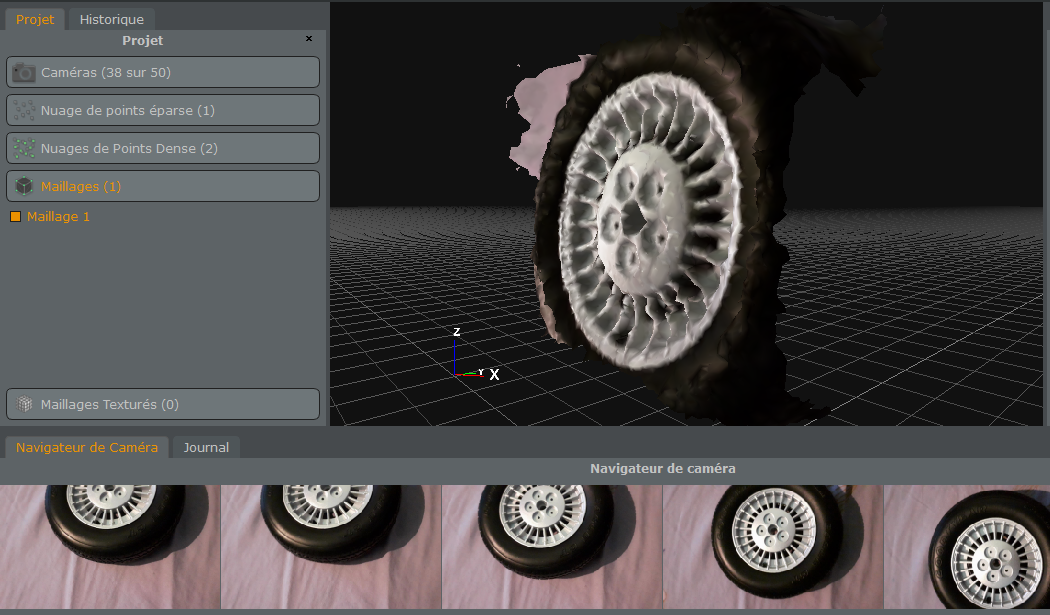
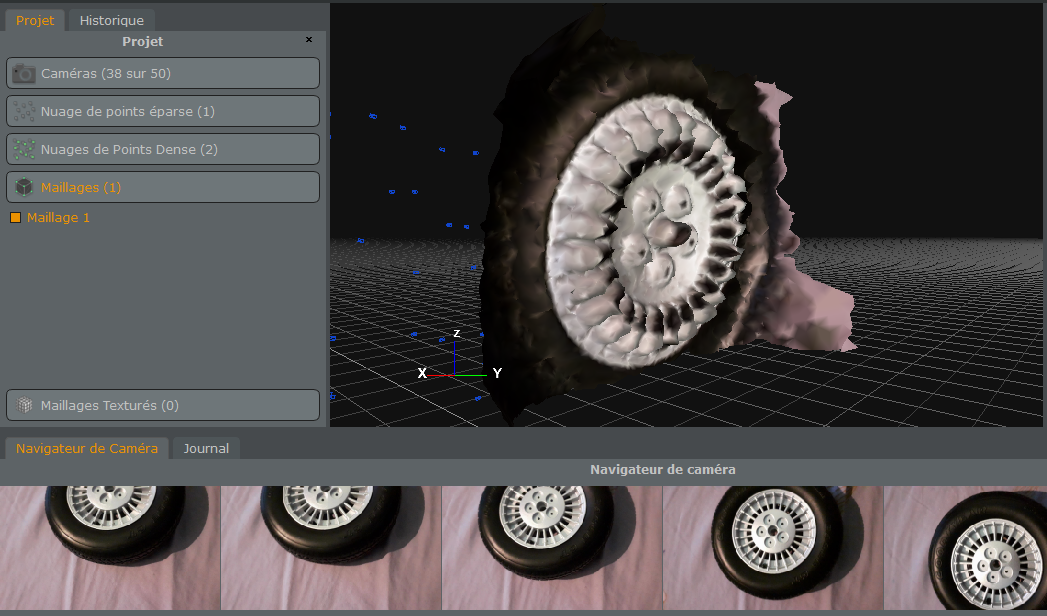
L'idéal c'est d'avoir une pièce contrasté et certain les tâches pour amélioré le rendu.












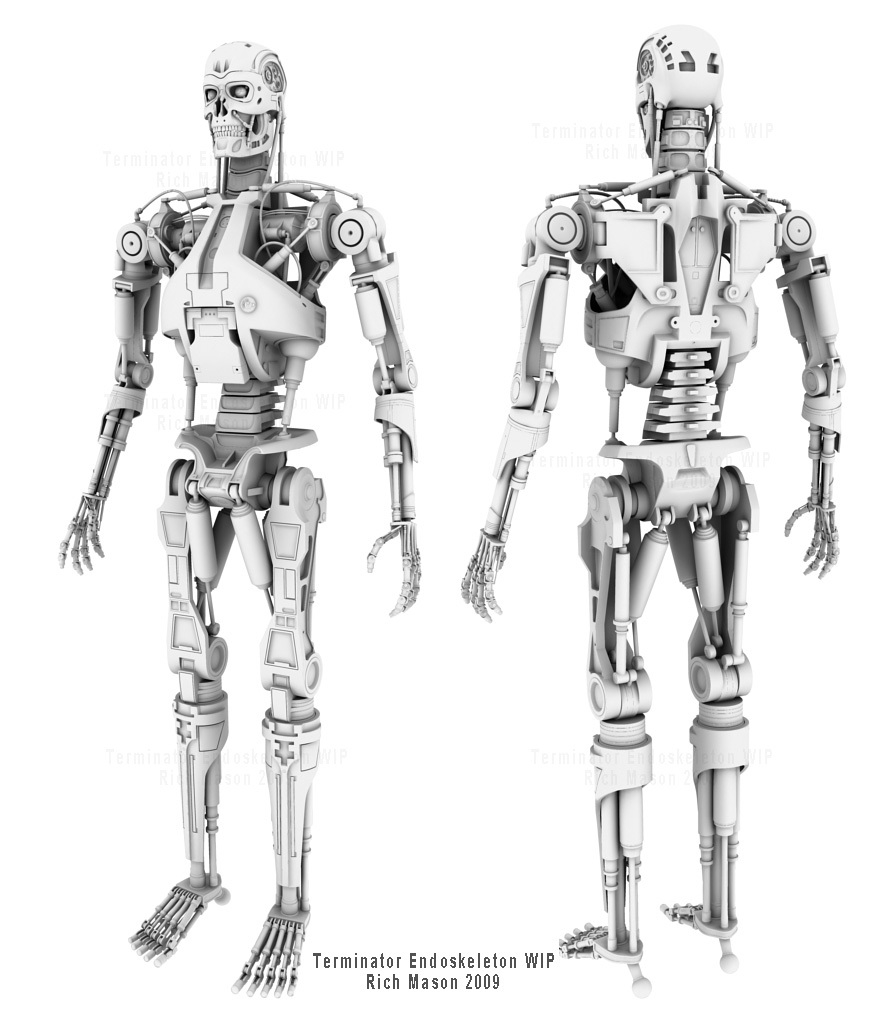

 les articulations d'un robot marchent en fonction de tes moyens et de ton imagination. On peut te montrer 15 bipèdes différents avec chacun des articulations au fonctionnements différents.
les articulations d'un robot marchent en fonction de tes moyens et de ton imagination. On peut te montrer 15 bipèdes différents avec chacun des articulations au fonctionnements différents.



