b'soir msieur dames...
j'arrive un peu tard sur le sujet, mais si je ne me trompe pas, la diode de ce schéma a pour role d'éliminer la partie negative du signal.
la capa 'c6' (il me semble lire ça.. , de 2.2uf, une fois chargée, va se décharger a l'inverse, introduisant un potentiel négatif dans le circuit, et c'est tout SAUF ce qu'on veut pour attaquer la base du transistor qui suit.
la diode 'ecrete' donc le signal et n'en laise que la partie positive.
en espérant avoir eclairci la chose ...
@ bientot !
Contenu de eihis
Il y a 63 élément(s) pour eihis (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#13114 des diodes mit a l'inverse
 Posté par
sur 03 septembre 2009 - 03:15
dans
Electronique
Posté par
sur 03 septembre 2009 - 03:15
dans
Electronique
#13115 mon "premier" robot
Posté par
sur 03 septembre 2009 - 03:37
dans
Robots mixtes / hybride
Bonjour m'sieur dames,
je suis nouvel inscrit sur ce forum.
quand j'etais jeune (14 ans), j'ai bricolé un premier robot, monté sur 4 roues, que se contentait de chercher a lumiere avec un LDR comme unique oeil.
les années ont passé, et a 38 ans, je me remet a la robotique (j'ai un bts electronique qui date de 1990)
donc pour ceux que ca interesse, je posterai au fur et a mesure des photos de mon 'truc'.
la chose est déja en cours de fabrication.
au programme :
un hexapode, 12 servos pour les membres.
la plateforme est circulaire, diametre total de la bete a peu près 45cm, bras 'étirés'.
2 bras (cad 4 servos) ont déja été assemblés, et j'ai fait quelques test de ma carte de commande.
j'ai choisi un PIC 18F452 , cadencé pour l'instant a 11Mhz (je n'avais que ce quartz sous la main). il tournera a 32 ou 36Mhz, sur le projet finalisé.
pour la gestion des servos, j'ai concu ma propre carte ,le proto est testé, je suis en train de fabriquer une carte intermediaire.
au programme :
A -gestion de 16 servos , PWM : mise a jour en un peu plus d'1:10eme de seconde pour la totalité (elle est de 300ms sur mon proto cadencé a 11Mhz).
B- un port de sortie numérique pour les capteurs a venir (j'en parlerais plus tard) : un port avec 4 'devices', 8 bits de data pour chacuns des ports, plus ligne de signal ( write, et une autre d'usage 'général')
C- 16 canaux analogique en entrée, multiplexés : pour cette partie, j'ai des tests de rapidités a faire, car l'affaire doit etre bien ficelée ( le pic demande pas mal de temps , entre l'acquisition, la mesure, et les contraintes de 'charge' sur son convertisseur a/n )
ces entrées ont deux buts :
1- permettre la commande du robot par potentiometres, pours gerer les 'poses' . une console est en cours de conception, et partiellement testée
2- permettre l'acquisition des signaux analogiques eventuels des capteurs.
coté code, je me suis remis a l'assembleur pour le pic...et ca se passe bien. microchip founit le necessaire pour developper facilement.
pour la programmation du PIC, j'utilise un montage très simple sur le port parallèle, pour programmer 'on board' (ICLVP)
voila en bref la 'chose'.
pour les servos, j'ai cherché chez conrad,marque 'modelcraft', d'entrée de gamme, les moins chers. les 4 premiers me paraissant satisfaisants, j'en ai acheté 12 autre (aie ! )
des photos très bientot !
@+
je suis nouvel inscrit sur ce forum.
quand j'etais jeune (14 ans), j'ai bricolé un premier robot, monté sur 4 roues, que se contentait de chercher a lumiere avec un LDR comme unique oeil.
les années ont passé, et a 38 ans, je me remet a la robotique (j'ai un bts electronique qui date de 1990)
donc pour ceux que ca interesse, je posterai au fur et a mesure des photos de mon 'truc'.
la chose est déja en cours de fabrication.
au programme :
un hexapode, 12 servos pour les membres.
la plateforme est circulaire, diametre total de la bete a peu près 45cm, bras 'étirés'.
2 bras (cad 4 servos) ont déja été assemblés, et j'ai fait quelques test de ma carte de commande.
j'ai choisi un PIC 18F452 , cadencé pour l'instant a 11Mhz (je n'avais que ce quartz sous la main). il tournera a 32 ou 36Mhz, sur le projet finalisé.
pour la gestion des servos, j'ai concu ma propre carte ,le proto est testé, je suis en train de fabriquer une carte intermediaire.
au programme :
A -gestion de 16 servos , PWM : mise a jour en un peu plus d'1:10eme de seconde pour la totalité (elle est de 300ms sur mon proto cadencé a 11Mhz).
B- un port de sortie numérique pour les capteurs a venir (j'en parlerais plus tard) : un port avec 4 'devices', 8 bits de data pour chacuns des ports, plus ligne de signal ( write, et une autre d'usage 'général')
C- 16 canaux analogique en entrée, multiplexés : pour cette partie, j'ai des tests de rapidités a faire, car l'affaire doit etre bien ficelée ( le pic demande pas mal de temps , entre l'acquisition, la mesure, et les contraintes de 'charge' sur son convertisseur a/n )
ces entrées ont deux buts :
1- permettre la commande du robot par potentiometres, pours gerer les 'poses' . une console est en cours de conception, et partiellement testée
2- permettre l'acquisition des signaux analogiques eventuels des capteurs.
coté code, je me suis remis a l'assembleur pour le pic...et ca se passe bien. microchip founit le necessaire pour developper facilement.
pour la programmation du PIC, j'utilise un montage très simple sur le port parallèle, pour programmer 'on board' (ICLVP)
voila en bref la 'chose'.
pour les servos, j'ai cherché chez conrad,marque 'modelcraft', d'entrée de gamme, les moins chers. les 4 premiers me paraissant satisfaisants, j'en ai acheté 12 autre (aie ! )
des photos très bientot !
@+
#13119 Pont en H avec L293D
Posté par
sur 03 septembre 2009 - 02:08
dans
Electronique
bonjour,
si j'ai bien compris, tu comptes utiliser le signal PWM pour entrer en DIRA0 ou DIRA1 ?
comment gères tu le signal enable ? tu autorise en continu ?
tu as fait un drole de choix je trouve : sans logique pour commuter, ce montage te prends 2 signauxPWM pour un seul moteur (avant / arrière )
enfin, j'ai peu etre pas tout capté .... peux tu m'expliquer plus en détail si tu as le temps ?
@+
si j'ai bien compris, tu comptes utiliser le signal PWM pour entrer en DIRA0 ou DIRA1 ?
comment gères tu le signal enable ? tu autorise en continu ?
tu as fait un drole de choix je trouve : sans logique pour commuter, ce montage te prends 2 signauxPWM pour un seul moteur (avant / arrière )
enfin, j'ai peu etre pas tout capté .... peux tu m'expliquer plus en détail si tu as le temps ?
@+
#13122 Pont en H avec L293D
Posté par
sur 03 septembre 2009 - 11:05
dans
Electronique
ok pour ça.
en fait pour commander av/ar , avec un IC du genre du l293, il te faut 2 signaux par moteur:
par exemple, coté 'A' du CI :
1 signal 'enable' , 0 ou 1 sur la broche 1
1 signal 'sens', 0 ou 1 ( tu fais passer ce signal par un inverseur pour en obtenir le complement )
-> le signal direct entre dans la broche 2
-> le signal complementé entre dans la broche 7.
pour agir sur la vitesse du moteur, l'ideal est de moduler le signal 'enable' au niveau de sa largeur d'impulsions : c'est du PWM.
c'est la meilleur facon de faire varier la puissance (et donc la vitesse) du moteur. les systemes 'résistifs' pour limiter le courant sont désastreux (pertes énormes en chaleur)
pour justifier le pwm, il faut savoir que : la valeur moyenne (puissance) d'un signal carré dépend directement de la largeur de l'impulsion sur la periode complete ( c'est l'intégrale sur une période des valeurs ponctuelles).
: la valeur moyenne (puissance) d'un signal carré dépend directement de la largeur de l'impulsion sur la periode complete ( c'est l'intégrale sur une période des valeurs ponctuelles).
donc, en résumé, si tu envoies un signal carré a ..disons 1Khz , sur l'entrée enable, en faisant varier la largeur de son impulsion, tu agit directement sur la vitesse de ton moteur, quel que soit le sens de rotation choisi .
Si tu choisis cette option, tu peux effectivement utiliser un signal PWM a l'origine destiné a piloter des servos pour piloter seulement la vitesse.
@+
en fait pour commander av/ar , avec un IC du genre du l293, il te faut 2 signaux par moteur:
par exemple, coté 'A' du CI :
1 signal 'enable' , 0 ou 1 sur la broche 1
1 signal 'sens', 0 ou 1 ( tu fais passer ce signal par un inverseur pour en obtenir le complement )
-> le signal direct entre dans la broche 2
-> le signal complementé entre dans la broche 7.
pour agir sur la vitesse du moteur, l'ideal est de moduler le signal 'enable' au niveau de sa largeur d'impulsions : c'est du PWM.
c'est la meilleur facon de faire varier la puissance (et donc la vitesse) du moteur. les systemes 'résistifs' pour limiter le courant sont désastreux (pertes énormes en chaleur)
pour justifier le pwm, il faut savoir que
: la valeur moyenne (puissance) d'un signal carré dépend directement de la largeur de l'impulsion sur la periode complete ( c'est l'intégrale sur une période des valeurs ponctuelles).donc, en résumé, si tu envoies un signal carré a ..disons 1Khz , sur l'entrée enable, en faisant varier la largeur de son impulsion, tu agit directement sur la vitesse de ton moteur, quel que soit le sens de rotation choisi .
Si tu choisis cette option, tu peux effectivement utiliser un signal PWM a l'origine destiné a piloter des servos pour piloter seulement la vitesse.
@+
#13123 mon "premier" robot
Posté par
sur 03 septembre 2009 - 11:21
dans
Robots mixtes / hybride
salut léon !
niveau capteurs, j'ai pris de la marge comme tu as pu le voir. le but étant d'avoir un systeme souple et adapté a différentes config.
pour ce qui est de l'intelligence, il faudrait du temps et un autre fil (qui existe déja je crois ..). le sujet est bien vaste !
j'ai dans la tete un système qui n'est qu'a l'état de concepts et de quelques tests.
l'idée : utiliser une 'matrice', disons de 16*16 entrées de coté.
2 cotés font 8entrées * 2
on aurait donc une sorte de plan 2D, qui est un 'terrain' de connection potentielles.
d'un coté une série de signaux générés par la carte, en 'hard' : horloges, horloges/2 , horloge/4 etc
de l'autre , des sorties vers les commandes des organes moteurs.
de facon totalement arbitraire (hasard) , on interconnecte ces points par le biais des signaux venant des capteurs.
-> selon le but recherché , on introduit une selection des résultats par performance. c'est un peu comme les algorithmes génétiques, en quelque sorte.
En y reflechissant, le but principal du vivant , c'est...de (sur)vivre.
je compte donc commencer le test de cette idée par une pression du type energétique.
par exemple : l'algorithme introduit une selection du type : combien de courant a été consommé pour parcourir 1m ?, et affine par passage succéssifs l'efficacité des combinaisons trouvées pour parcourir le plus de distance en bouffant le moins d'accus.
J'ai conscience que mecaniquement, c'est un peu violent : les essais au hasard de combinaisons de rotation des servos risque d'etre rude pour le robot, mais en ralentissant les mouvements...on verra bien.
Sur un hexapode, plusieurs possibilités sont valables pour avancer (je parle de l'ordre de chaque mouvements) et du coup, c'est interessant de voir quelle combinaison sortira de cet algorithme, en comparaison avec les sequences 'connues' et habituelles (avance 2 pattes, pivot patte opposée etc )
@+ !
->
niveau capteurs, j'ai pris de la marge comme tu as pu le voir. le but étant d'avoir un systeme souple et adapté a différentes config.
pour ce qui est de l'intelligence, il faudrait du temps et un autre fil (qui existe déja je crois ..). le sujet est bien vaste !
j'ai dans la tete un système qui n'est qu'a l'état de concepts et de quelques tests.
l'idée : utiliser une 'matrice', disons de 16*16 entrées de coté.
2 cotés font 8entrées * 2
on aurait donc une sorte de plan 2D, qui est un 'terrain' de connection potentielles.
d'un coté une série de signaux générés par la carte, en 'hard' : horloges, horloges/2 , horloge/4 etc
de l'autre , des sorties vers les commandes des organes moteurs.
de facon totalement arbitraire (hasard) , on interconnecte ces points par le biais des signaux venant des capteurs.
-> selon le but recherché , on introduit une selection des résultats par performance. c'est un peu comme les algorithmes génétiques, en quelque sorte.
En y reflechissant, le but principal du vivant , c'est...de (sur)vivre.
je compte donc commencer le test de cette idée par une pression du type energétique.
par exemple : l'algorithme introduit une selection du type : combien de courant a été consommé pour parcourir 1m ?, et affine par passage succéssifs l'efficacité des combinaisons trouvées pour parcourir le plus de distance en bouffant le moins d'accus.
J'ai conscience que mecaniquement, c'est un peu violent : les essais au hasard de combinaisons de rotation des servos risque d'etre rude pour le robot, mais en ralentissant les mouvements...on verra bien.
Sur un hexapode, plusieurs possibilités sont valables pour avancer (je parle de l'ordre de chaque mouvements) et du coup, c'est interessant de voir quelle combinaison sortira de cet algorithme, en comparaison avec les sequences 'connues' et habituelles (avance 2 pattes, pivot patte opposée etc )
@+ !
->
#13125 mon "premier" robot
Posté par
sur 04 septembre 2009 - 02:27
dans
Robots mixtes / hybride
comme promis, les premières photos de la bete.
le plastique utilisé provient de billots de découpe tels qu'on peut les trouver en supermarché . c'est solide, leger et facile a mettre en oeuvre.
j'ai recu mes servos, la scie a chantourner va travailler !
@bientot !
le plastique utilisé provient de billots de découpe tels qu'on peut les trouver en supermarché . c'est solide, leger et facile a mettre en oeuvre.
j'ai recu mes servos, la scie a chantourner va travailler !
@bientot !
Image(s) jointe(s)




#13128 Pont en H avec L293D
Posté par
sur 04 septembre 2009 - 01:29
dans
Electronique
précisement, bybop.
en fait, si ta carte est prévue pour du VRAI pwm, tu pourras faire varier le rapport cyclique de quasiment 0 a quasiment 100%.
mais si elle est prévue pour piloter uniquement des servos, le rapport cyclique n'est pas total.
les servos attentend en entrée des impulsions d'une durée de 0.5 a 2.5ms , toutes les 20ms minimum. ( 0.5ms = position minimum à 0° , 2.5ms=position maximum a 180° )
le moteur ne pourra donc jamais aller plus vite qu'au 1/5eme de son maximum , en gros.
Malgré tout, et tenant compte de ce fait, tu peux quand meme piloter ton moteur, en le soumettant a une tension superieure a la tension nominale, puisque la puissance totale envoyée a celui si est inférieure a la puissance nominale qu'il peut encaisser (pwm)
en gros, pour contourner le fait que ton rapport cyclique n'eccede pas 1/5eme, tu peux soumettre un moteur prévu pour 3V a du 9V en PWM 'servo'.
@+
en fait, si ta carte est prévue pour du VRAI pwm, tu pourras faire varier le rapport cyclique de quasiment 0 a quasiment 100%.
mais si elle est prévue pour piloter uniquement des servos, le rapport cyclique n'est pas total.
les servos attentend en entrée des impulsions d'une durée de 0.5 a 2.5ms , toutes les 20ms minimum. ( 0.5ms = position minimum à 0° , 2.5ms=position maximum a 180° )
le moteur ne pourra donc jamais aller plus vite qu'au 1/5eme de son maximum , en gros.
Malgré tout, et tenant compte de ce fait, tu peux quand meme piloter ton moteur, en le soumettant a une tension superieure a la tension nominale, puisque la puissance totale envoyée a celui si est inférieure a la puissance nominale qu'il peut encaisser (pwm)
en gros, pour contourner le fait que ton rapport cyclique n'eccede pas 1/5eme, tu peux soumettre un moteur prévu pour 3V a du 9V en PWM 'servo'.
@+
#13130 Pont en H avec L293D
Posté par
sur 04 septembre 2009 - 02:40
dans
Electronique
ce dont tu me parles correspond simplement a modifier un servo pour qu'il n'arrive jamais a la position désirée.
cette modif lui permet de tourner en permanence dans un sens ou dans l'autre...pour ca, il faut eliminer le potentiometre sensé traduire la position de l'axe par un resistance fixe, qui fait croire au servo qu'il est toujours en position centrale.
comme le servo 'croit' etre en position centrale, si l'impulsion est de 0.5ms, il se met a tourner pour rejoindre la position minimum. mais le potentiometre ayant ete eliminé, sont systeme d'asservissement est trompé : il va donc en permamence tourner vers la position 'basse', sans jamais l'atteindre. idem pour l'inverse en position haute.
cette modif lui permet de tourner en permanence dans un sens ou dans l'autre...pour ca, il faut eliminer le potentiometre sensé traduire la position de l'axe par un resistance fixe, qui fait croire au servo qu'il est toujours en position centrale.
comme le servo 'croit' etre en position centrale, si l'impulsion est de 0.5ms, il se met a tourner pour rejoindre la position minimum. mais le potentiometre ayant ete eliminé, sont systeme d'asservissement est trompé : il va donc en permamence tourner vers la position 'basse', sans jamais l'atteindre. idem pour l'inverse en position haute.
#13132 Pont en H avec L293D
Posté par
sur 04 septembre 2009 - 04:02
dans
Electronique
pour la modif du servo, un exemple typique ici :
http://www.acroname.com/robotics/info/ideas/continuous/continuous.html
Pour ce qui est du schéma pour un moteur comme le tien, je te donne la base du principe.
sachant que la valeur moyenne du signal dépend directement du rapport cyclique (comme je l'expliquais dans ma réponse précédente), il te faut un montage a 2 etages :
le premier traduit le signal pwm en tension 'dc'. : c'est en fait un "filtre passe bas", intégrateur.
la tension obtenue est directement proportionelle au rapport cyclique recu. plus l'impulsion est large, plus la valeur DC augmente.
de la, il te faut un deuxieme étage, comparateur de tension ( a base d'AOP) , qui compare la tension DC de l'integrateur avec une tension 'reference' ( cette tension, dans le servo, c'est le potentiometre qui la regle. dans ton cas, c'est une tension qui sera fixe, representant le 'zero mouvement' de ton moteur.
en sortie du comparateur, tu obtiens directement un signal '0v' ou '+vcc', traduisant le résultat de la comparaison.
Donc la tension de référence de ce comparateur est en fait a calculer comme étant le résultat que donnera ton intégrateur/passe bas avec une largeur d'impulsion qui serait d'environ 1.5ms ( a peu près la position 'milieu' du servo.
je n'ai pas le temps immédiatement de te pondre un petit schéma plus explicite, car il y'a quelques calculs a faire. mais je pense qu'un cherchant sur le net, tu devrais trouver ton bonheur .
@+
http://www.acroname.com/robotics/info/ideas/continuous/continuous.html
Pour ce qui est du schéma pour un moteur comme le tien, je te donne la base du principe.
sachant que la valeur moyenne du signal dépend directement du rapport cyclique (comme je l'expliquais dans ma réponse précédente), il te faut un montage a 2 etages :
le premier traduit le signal pwm en tension 'dc'. : c'est en fait un "filtre passe bas", intégrateur.
la tension obtenue est directement proportionelle au rapport cyclique recu. plus l'impulsion est large, plus la valeur DC augmente.
de la, il te faut un deuxieme étage, comparateur de tension ( a base d'AOP) , qui compare la tension DC de l'integrateur avec une tension 'reference' ( cette tension, dans le servo, c'est le potentiometre qui la regle. dans ton cas, c'est une tension qui sera fixe, representant le 'zero mouvement' de ton moteur.
en sortie du comparateur, tu obtiens directement un signal '0v' ou '+vcc', traduisant le résultat de la comparaison.
Donc la tension de référence de ce comparateur est en fait a calculer comme étant le résultat que donnera ton intégrateur/passe bas avec une largeur d'impulsion qui serait d'environ 1.5ms ( a peu près la position 'milieu' du servo.
je n'ai pas le temps immédiatement de te pondre un petit schéma plus explicite, car il y'a quelques calculs a faire. mais je pense qu'un cherchant sur le net, tu devrais trouver ton bonheur .
@+
#13133 Comment faites vous vos circuits impimés
Posté par
sur 04 septembre 2009 - 04:19
dans
Electronique
Je fais mes circuits dans la cave 
insolation : avec un kit 'rechange' de chez gotronic.fr , assemblé dans un vieux tiroir en bois + une vitre taillée chez leroymerlin (environ 4euros)
gravure dans un bac tout bete.
avec l'alu au fond du tiroir, j'expose environ 45sec mes typons.
les typons sont imprimés sur papier transparent standard, avec un imprimante jet d'encre HP F380 , cartouches d'encre noir HP . position d'impression : noir uniquement, PPP maximum, papier : autre film transparent.
j'achete mes plaques présensibilisées chez gotronic ou conrad, selon les commandes. il me semble que chez conrad la gelatine est de meilleur qualité , mais par contre, le cuivre présente plus de défauts (grains) que chez gotronic.
insolation : avec un kit 'rechange' de chez gotronic.fr , assemblé dans un vieux tiroir en bois + une vitre taillée chez leroymerlin (environ 4euros)
gravure dans un bac tout bete.
avec l'alu au fond du tiroir, j'expose environ 45sec mes typons.
les typons sont imprimés sur papier transparent standard, avec un imprimante jet d'encre HP F380 , cartouches d'encre noir HP . position d'impression : noir uniquement, PPP maximum, papier : autre film transparent.
j'achete mes plaques présensibilisées chez gotronic ou conrad, selon les commandes. il me semble que chez conrad la gelatine est de meilleur qualité , mais par contre, le cuivre présente plus de défauts (grains) que chez gotronic.
#13138 mon "premier" robot
Posté par
sur 05 septembre 2009 - 02:35
dans
Robots mixtes / hybride
hello bernard
les servos sont fixés sur la platine mais ca n'est pas une platine electronique.
en fait c'est une platine epoxy de récup, assez robuste : j'ai éliminé tous les composants et on voit encore les pistes. il sera toujours temps de lui ajouter des nervures de renfort si elle venait a etre trop souple avec le poids total de l'electronique+accus !
pour les servos, de mémoire, les modelcraft visibles sur les photos ( achetés chez conrad ) m'ont couté dans les 6 euros la piece .
les servos sont fixés sur la platine mais ca n'est pas une platine electronique.
en fait c'est une platine epoxy de récup, assez robuste : j'ai éliminé tous les composants et on voit encore les pistes. il sera toujours temps de lui ajouter des nervures de renfort si elle venait a etre trop souple avec le poids total de l'electronique+accus !
pour les servos, de mémoire, les modelcraft visibles sur les photos ( achetés chez conrad ) m'ont couté dans les 6 euros la piece .
#13145 mon "premier" robot
Posté par
sur 06 septembre 2009 - 04:36
dans
Robots mixtes / hybride
héhé . question servo, je n'ai pas trouvé moins cher ailleurs. et j'en suis content.
par contre, je n'ai pas d'actions chez GOTRONIC.FR , mais ca vaut beaucoup plus le coup que chez CONRAD, question composants.
pour s'en convaincre, ouvrir les 2 sites en parallèle et remplir le panier d'achats identiques : la différence est ENORME. ( ma dernier commande : 90euros total chez gotronic, la meme chez conrad : 147 !!
@+
. question servo, je n'ai pas trouvé moins cher ailleurs. et j'en suis content.par contre, je n'ai pas d'actions chez GOTRONIC.FR , mais ca vaut beaucoup plus le coup que chez CONRAD, question composants.
pour s'en convaincre, ouvrir les 2 sites en parallèle et remplir le panier d'achats identiques : la différence est ENORME. ( ma dernier commande : 90euros total chez gotronic, la meme chez conrad : 147 !!
@+
#13152 mon "premier" robot
Posté par
sur 07 septembre 2009 - 01:53
dans
Robots mixtes / hybride
Bonjour !
Merci pour l'info inounx. j'en saurais plus une fois les 6 pattes assemblées.
pour l'instant (et comme j'aime bien raconter ma vie ), voila ou j'en suis, en image et en video !.
en fait j'ai concu une deuxieme mouture de la carte d'e/s pilotée par le pic.
je suis passé d'une carte 100% TTL a une carte 90% CMOS .
la raison : le nombre d'e/s nécéssaires, et certains CI cmos inexistants en TTL .
La carte marche impeccable pour sa partie 'pilotage' des 16 servos.
j'ai joint un lien vers une video (un peu sombre) qui montre une séquence de commande des servos en boucle, sur les 2 bras déja assemblés.
la video est ici : http://www.eihis.com/robotics/spider6/spider_test1.avi
et aussi donc, 2 photos en pieces jointes (pas franchement utiles en fait...lol )
la deuxième : la plaque d'essai avec le PIC
la première, la carte nouvelle en test (on voit dessus l'emplacement du CI d'acquisition A/N qui n'est pas encore monté. celui qui est déja dessus est le démultiplexeur 16 canaux des servos.
prochaine étape : decoupe des autres bras.
@ bientot !
Merci pour l'info inounx. j'en saurais plus une fois les 6 pattes assemblées.
pour l'instant (et comme j'aime bien raconter ma vie ), voila ou j'en suis, en image et en video !.
en fait j'ai concu une deuxieme mouture de la carte d'e/s pilotée par le pic.
je suis passé d'une carte 100% TTL a une carte 90% CMOS .
la raison : le nombre d'e/s nécéssaires, et certains CI cmos inexistants en TTL .
La carte marche impeccable pour sa partie 'pilotage' des 16 servos.
j'ai joint un lien vers une video (un peu sombre) qui montre une séquence de commande des servos en boucle, sur les 2 bras déja assemblés.
la video est ici : http://www.eihis.com/robotics/spider6/spider_test1.avi
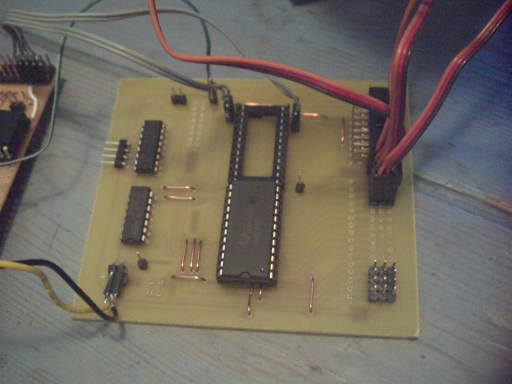
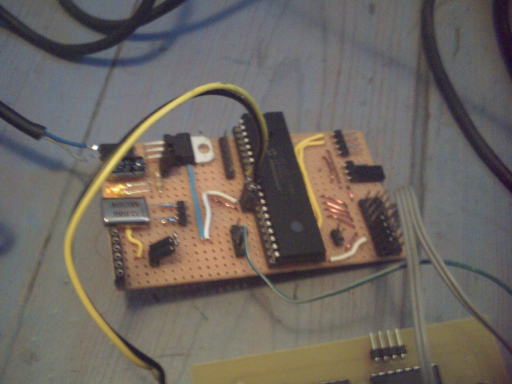
et aussi donc, 2 photos en pieces jointes (pas franchement utiles en fait...lol )
la deuxième : la plaque d'essai avec le PIC
la première, la carte nouvelle en test (on voit dessus l'emplacement du CI d'acquisition A/N qui n'est pas encore monté. celui qui est déja dessus est le démultiplexeur 16 canaux des servos.
prochaine étape : decoupe des autres bras.
@ bientot !
Image(s) jointe(s)
#13157 mon "premier" robot
Posté par
sur 08 septembre 2009 - 09:08
dans
Robots mixtes / hybride
hey aquanum .. je regardais ton site avec Genesis... et je sens que ton aide me sera utile plus tard .
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+
plus je réfléchis et plus je sens qu'un pic va etre trop limité en terme de gestion de l'IA, meme en intégrant une reseau de neurones 'en hard' ( c'etait mon idée de base) : du coup, il faudra surement faire un interface de comm. avec un pc dans un premier temps : tes renseignements me seront précieux.
j'ai déja utilise la lib SDL , mais c'etait une SDL pour les graphisme 2D en c. est ce de la meme dont tu parles ?
@+
#13158 Emergence et reseau de neurones
Posté par
sur 08 septembre 2009 - 09:51
dans
Intelligence artificielle
Bonjour,
j'ai parcouru les sujets du forum et je souhaiterais connaitre vos opinions sur une idée qui me trotte depuis pas mal de temps.
Si vous avez déja quelques connaissances sur le sujet des reseaux neuronaux, ca va etre plus pratique.
Sur le principe de base, le reseau de neurone doit passer par une phase d'apprentissage : pendant cette phase , certaines liaisons sont renforcées , d'autres affaiblies.
Hors une des lois de base est que lorsque 2 neurones présentent un déclenchement synchrone lors d'un stimulus, la liaison qui les lie se renforce.
De plus, un neurone qui a un déclenchement 'tout ou rien' , par exemple, réagit au resultat d'une SOMME de signaux entrants : passé un certain seuil, il devient 'passant' , et en deça, il est 'bloqué'.
Bon tout ça, on le sait.
Mais avez vous déja étudié un peu les simulateurs dits 'du jeu de la vie' ?
les regles du jeu de la vie ont étés inventées par CONWAY. si vous ne connaissez pas ce sujet, je vous invite a chercher sur le net, wiki etc. il y'a des tonnes de simulateurs gratuits.
Ces automates cellulaires ont été démontrés etre capable de simuler toutes les fonctions d'une machine Turing.
J'en viens au sujet de ma reflection :
Les automates cellulaires de conway réagissent a des regles simples, qui sont , en schématisant :
passé un certain seuil de population environant une cellule 'vide', une cellule 'vivante' est crée.
et
au dela d'un certain seuil entourant une cellule vivante, celle ci meurt (par surpopulation, pourrait-on dire) .
Les regles de conway, simples, créent des comportements complexes : toute une population EMERGENTE d'etres cellulaires se creent, et interragissent.
Mon idée, c'est en fait de faire appliquer a un reseau neural les regles de conway, de facon a ce que les POIDS et les liaisons existantes découlent directement des regles de conway.
de cette facon, un neurone précis peut, au dela d'un certain seuil, creer de nouvelles liaisons (signaux) vers des neurones non connectés jusqu'alors (exactement comme une cellule, dans le jeu de la vie,peut le faire par déplacement), ou bien en détruire (encore une fois , comme dans le jeu de la vie.
de cette facon, on ferait passer le reseau neural 'simple' et plutot statique a un état dynamique permanent et emergent (puisque répondant a des regles qui sont de nature a créer un systeme instable tendant a l'emergence)
notre atout dans ce cas, sera que les regles du jeu de la vie sont déja connues comme fonctionnant, pour créer un systeme dit 'emergent'.
J'ajoute que j'ai déja fait un simulateur 3D (avec blitz basic 3d), et que le systeme du jeu de la vie 2D fonctionne aussi en 3d (jai pu le tester en cube de 10x10x10 cellules), moyennant une modification des VALEURS de seuil ( naissance/mort d'une cellule) seulement.
des idées ? ce sujet me trirure l'esprit depuis pas mal de temps , j'avoue.
@+
j'ai parcouru les sujets du forum et je souhaiterais connaitre vos opinions sur une idée qui me trotte depuis pas mal de temps.
Si vous avez déja quelques connaissances sur le sujet des reseaux neuronaux, ca va etre plus pratique.
Sur le principe de base, le reseau de neurone doit passer par une phase d'apprentissage : pendant cette phase , certaines liaisons sont renforcées , d'autres affaiblies.
Hors une des lois de base est que lorsque 2 neurones présentent un déclenchement synchrone lors d'un stimulus, la liaison qui les lie se renforce.
De plus, un neurone qui a un déclenchement 'tout ou rien' , par exemple, réagit au resultat d'une SOMME de signaux entrants : passé un certain seuil, il devient 'passant' , et en deça, il est 'bloqué'.
Bon tout ça, on le sait.
Mais avez vous déja étudié un peu les simulateurs dits 'du jeu de la vie' ?
les regles du jeu de la vie ont étés inventées par CONWAY. si vous ne connaissez pas ce sujet, je vous invite a chercher sur le net, wiki etc. il y'a des tonnes de simulateurs gratuits.
Ces automates cellulaires ont été démontrés etre capable de simuler toutes les fonctions d'une machine Turing.
J'en viens au sujet de ma reflection :
Les automates cellulaires de conway réagissent a des regles simples, qui sont , en schématisant :
passé un certain seuil de population environant une cellule 'vide', une cellule 'vivante' est crée.
et
au dela d'un certain seuil entourant une cellule vivante, celle ci meurt (par surpopulation, pourrait-on dire) .
Les regles de conway, simples, créent des comportements complexes : toute une population EMERGENTE d'etres cellulaires se creent, et interragissent.
Mon idée, c'est en fait de faire appliquer a un reseau neural les regles de conway, de facon a ce que les POIDS et les liaisons existantes découlent directement des regles de conway.
de cette facon, un neurone précis peut, au dela d'un certain seuil, creer de nouvelles liaisons (signaux) vers des neurones non connectés jusqu'alors (exactement comme une cellule, dans le jeu de la vie,peut le faire par déplacement), ou bien en détruire (encore une fois , comme dans le jeu de la vie.
de cette facon, on ferait passer le reseau neural 'simple' et plutot statique a un état dynamique permanent et emergent (puisque répondant a des regles qui sont de nature a créer un systeme instable tendant a l'emergence)
notre atout dans ce cas, sera que les regles du jeu de la vie sont déja connues comme fonctionnant, pour créer un systeme dit 'emergent'.
J'ajoute que j'ai déja fait un simulateur 3D (avec blitz basic 3d), et que le systeme du jeu de la vie 2D fonctionne aussi en 3d (jai pu le tester en cube de 10x10x10 cellules), moyennant une modification des VALEURS de seuil ( naissance/mort d'une cellule) seulement.
des idées ? ce sujet me trirure l'esprit depuis pas mal de temps , j'avoue.
@+
#13159 robot bipede, progression lente
Posté par
sur 08 septembre 2009 - 10:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
L'histoire de kilos et newtons, ca me fait un peu peur...
peut etre que tu devrais lire un peu de trucs sur les bases de mécanique, pour un projet comme bipède ?
Mais bon, 3.7Kg/cm , ca te fait 3.7Kg soulevables par un bras d'1cm sur le servo. donc,1.85kg a 2cm, etc... pour un bras de 10cm : 370grammes .... a toi de faire les conclusions
peut etre que tu devrais lire un peu de trucs sur les bases de mécanique, pour un projet comme bipède ?
Mais bon, 3.7Kg/cm , ca te fait 3.7Kg soulevables par un bras d'1cm sur le servo. donc,1.85kg a 2cm, etc... pour un bras de 10cm : 370grammes .... a toi de faire les conclusions
#13161 mon "premier" robot
Posté par
sur 08 septembre 2009 - 01:38
dans
Robots mixtes / hybride
bah écoute, si je peux t'aider niveau electronique, n'hésite pas!
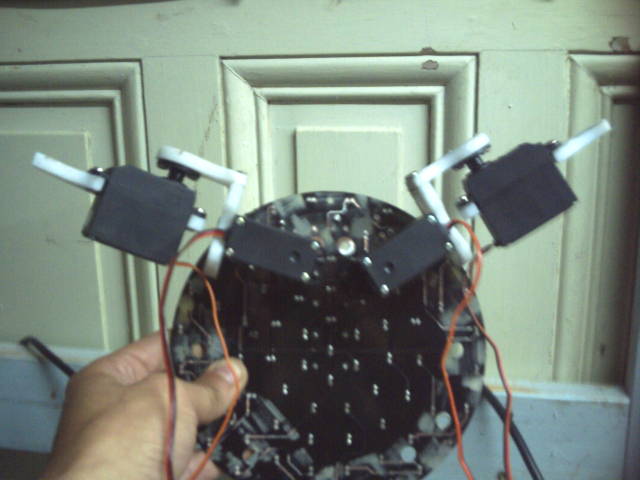
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
a part ça, les 6 pattes sont assemblées et montées, et voila 2 photos !
@bientot pour la suite des réjouissances
Image(s) jointe(s)


#13163 Emergence et reseau de neurones
Posté par
sur 08 septembre 2009 - 08:27
dans
Intelligence artificielle
ouhhhhh excellent !
je vais consulter tout ça.
justement , le fait de qualifier de 'gaz' me fait penser que j'avais lu quelque part que des regles de conway avaient étées dérivées certaines, très proches, pour la simulation de l'inflamation de gaz dans un milieu fermé ...
bon, je suis dans votre trip alors (lol).
la meilleure, c'est que je pensais , comme j'en avais parlé dans un post précédent, appliquer ensuite un algorythme génétique pour selectionner parmi plusieurs reseaux concurrent dans la meme tache..
que du bonheur.merci pour ta réponse ! @biento et bon courage dans tes recherches
je vais consulter tout ça.
justement , le fait de qualifier de 'gaz' me fait penser que j'avais lu quelque part que des regles de conway avaient étées dérivées certaines, très proches, pour la simulation de l'inflamation de gaz dans un milieu fermé ...
bon, je suis dans votre trip alors (lol).
la meilleure, c'est que je pensais , comme j'en avais parlé dans un post précédent, appliquer ensuite un algorythme génétique pour selectionner parmi plusieurs reseaux concurrent dans la meme tache..
que du bonheur.merci pour ta réponse ! @biento et bon courage dans tes recherches
#13165 mon "premier" robot
Posté par
sur 09 septembre 2009 - 01:44
dans
Robots mixtes / hybride
... en faisant des test en comparant les S3003 de futaba et les modelcraft je me suis aperçu que les modelcrafts consommaient plus. Lors d'un déplacement demandant du couple les futaba montaient à environ 500mA (de mémoire) en pic et les modelcraft à presque le double. A voir pour l'autonomie du robot, c'est toujours bon à savoir.
premiers tests et recherche des min/max pour les positions des servos :
en initialisant les 12 simultanément, la conso s'envole, le pauvre 7805 surchauffe : forcément, 1A pour 12servos...c'etait un peu limite...
modification : j'ajoute un regulateur 7805 monté sur un 2n3055 pour la section servos. du coup, petite coupure piste et modif sur la carte E/S ... des choses qui arrivent
j'aimerais savoir quel systeme vous utilisez pour la régule de vos accus ?
@bientot !
#13170 mon "premier" robot
Posté par
sur 09 septembre 2009 - 04:22
dans
Robots mixtes / hybride
hm le lm323 je crois, de mémoire fait 3A .
bon le montage avec 3055 donne de la marge, pas besoin d'un dissipateur énorme a priori.j'ai ajouté une capa de 470uf en sortie, et une 1n4007 entre la masse et la masse du régulteur pour compenser la perte de la jonction B-E du transistor. a l'arrivé, 5.2V et ca passe nickel, le 7805 n'est plus du tout chaud.
j'ai passé l'après midi a faire une sequence pour patte .. une video bientot !
@+ et merci pour vos réponses !
bon le montage avec 3055 donne de la marge, pas besoin d'un dissipateur énorme a priori.j'ai ajouté une capa de 470uf en sortie, et une 1n4007 entre la masse et la masse du régulteur pour compenser la perte de la jonction B-E du transistor. a l'arrivé, 5.2V et ca passe nickel, le 7805 n'est plus du tout chaud.
j'ai passé l'après midi a faire une sequence pour patte .. une video bientot !
@+ et merci pour vos réponses !
#13173 mon "premier" robot
Posté par
sur 10 septembre 2009 - 03:45
dans
Robots mixtes / hybride
kikou léon !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction ( ) :
1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
pas de panique : je régule mes servos pour des raisons bien précises :
1-Je fais mes tests a partir d'une alim variable
2-J'ai besoin d'une tension fixe pour mesurer facilement le courant consommé par la suite ( cf. mon idée de stratégie pour le developpement de l'IA : pression 'energetique' )
3-Dans le cas ou je ferais une modif servo pour avoir leur position en données entrantes, la tension qui reviendra dépendra directement , a sa valeur maximale, de la tension d'alim des servos : j'ai donc dans l'idée de préparer déja le terrain en faisant tout tourner sous 5v, de facon a ne pas a voir a ajouter de composants si jamais je decidais d'utiliser ce feedback 'position' , vu que la logique de la carte et la carte PIC18F elle meme prévues pour 5V.
Enfin, pour l'instant, l'alim variable en 12V m'est nécéssaire car je bosse sur une carte 'monitoring' (controle par potars + visu de la memoire, etat du pic etc ) connectable qui, elle, tournera en 12V , et cette carte est actuellement directement alimentée par ma carte E/S
Voila pourquoi
pour maintenant, parceque j'ai un esprit de contradiction (
) :1 - pour l'efficience, je suis daccord avec toi bien que, tout de meme, on est pas dans des alims de 100taines de watt : j'objecterai que le rapport poids/efficience diminue a mes yeux le gain d'utiliser une alim a découpage ( [ poids de la carte a base de LM2575 avec la grosse self moulée -VS- poids du boitier plastique du 7805 + 2n3055 ] )
2 - limitation des composants = moins de difficultées a trouver les sources de pannes
3 - prix du composant ( lm2575 = 3* lm7805
ok, je cherche la petite bete , je sais !
#13174 Leon
Posté par
sur 10 septembre 2009 - 03:53
dans
Et si vous vous présentiez?
C'est DARK-LEON qui s'exprime ! 
Mr Dollar dit : "On a pas besoin de robots pensants pour souder des voitures ! mais pour faire la guerre....faut voir "
Mr Dollar dit : "On a pas besoin de robots pensants pour souder des voitures ! mais pour faire la guerre....faut voir "
#13176 Logiciel pour Circuits Imprimés
Posté par
sur 10 septembre 2009 - 04:27
dans
Electronique
Hello ,
j'utilise actuellement EAGLE pour le routage (enfin.. c'est un bien grand mot, vu que l'intelligence humaine dépasse allègrement les capacités de routage d'Eagle )
Le hic c'est que la version light gratuite n'apporte aucun support valable dès qu'on veut pousser un peu dans son utilisation ( de meme la taille de la carte est limitée..)
Connaissez vous d'autres logiciels gratuits et efficaces (et non limités) ?
En particulier (a moins que je n'ai pas trouvé comment le configurer sous eagle), je cherchais un logiciel capable d'implanter les composants a des angles 'exotiques', par exemple 30°,60° etc ), et/ou de créer des face cuivre 'inverses', je veux dire par la que les pistes sont très 'larges' et le logiciel fait un détourage des connections, plutot qu'une piste pour relier 2 pads (ceci dans le but de graver plus vite et de bouffer moins de perchlo a chaque gravure)
any ideas ?
j'utilise actuellement EAGLE pour le routage (enfin.. c'est un bien grand mot, vu que l'intelligence humaine dépasse allègrement les capacités de routage d'Eagle )
Le hic c'est que la version light gratuite n'apporte aucun support valable dès qu'on veut pousser un peu dans son utilisation ( de meme la taille de la carte est limitée..)
Connaissez vous d'autres logiciels gratuits et efficaces (et non limités) ?
En particulier (a moins que je n'ai pas trouvé comment le configurer sous eagle), je cherchais un logiciel capable d'implanter les composants a des angles 'exotiques', par exemple 30°,60° etc ), et/ou de créer des face cuivre 'inverses', je veux dire par la que les pistes sont très 'larges' et le logiciel fait un détourage des connections, plutot qu'une piste pour relier 2 pads (ceci dans le but de graver plus vite et de bouffer moins de perchlo a chaque gravure)
any ideas ?
#13184 mon "premier" robot
Posté par
sur 11 septembre 2009 - 10:05
dans
Robots mixtes / hybride
Oh léon , ne fait pas du boudin ... je t'ai dit que je cherchais la petite bete.
Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
... je t'ai dit que je cherchais la petite bete.Ton choix est censé , j'ai pris note !
Pour ce qui est ne la conso des servos, actuellement, en mouvement, l'araignée monte en pic a 1A sous 12V ( et c'est sans forcer exagérement sur les servos, cad faisant 'normallement' marcher les bras).
Ce que je trouve interressant a l'heure actuelle c'est que la programmation-même des mouvements de chaque element oblige a une reflection sur la consommation ( de maniere a ce que les servos ne bouffent pas 'un max' ) , chose que dame nature a réglé toute seule en millions d'années.
on fait un robot, et on retombe sur les memes problemes : c'est génial
A part ça, pour l'instant, la sequence marche 'avant' est terminée, mais je dois maintenant ajuster les mouvements synchrones pour optimiser la trajectoire (mouvement circulaire -> mouvement rectiligne des 'avant' bras a compenser avec une rotation des elements touchant le sol )
Je n'ai pas pesé la bete, mais 3 cartes epoxy+composants + 12*37g , ca devrait faire dans les 500grammes au max ...
Combien pesent des accus NimH ? des Lipo ? des LiIon ?
Merci pour tes réponses
#13186 mon "premier" robot
Posté par
sur 11 septembre 2009 - 10:57
dans
Robots mixtes / hybride
Eh oui aqua !
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
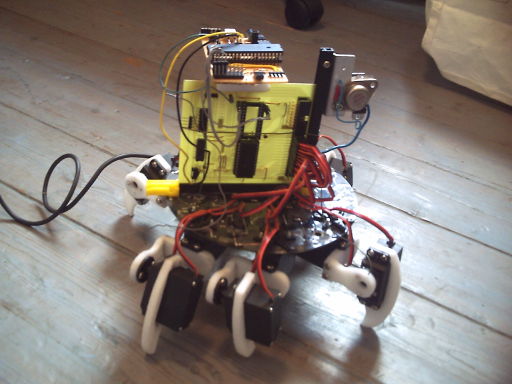
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes! )
)
bon je dois dire que le monde est tellement bien fait que je suis gardien de nuit : j'ai du temps pour cogiter mon truc , et je bosse dessus pendant mes jours de repos.
la video d'un 1.5 parcourus est ici :
http://www.eihis.com/robotics/spider6/spider_walk_11-09-2009.AVI (9Mo)
-- on peut constater la démarche qui ressemble a celle d'un mec bourré ou encore un peu celle d'un patineur, vu de derrière (ya des trucs a peaufiner lol) .
..et une photo de la bete a l'arret, avec le montage (hasardeux) des 3 cartes.
dédicace a léon qui reconnaitra le transistor "poubelle a watt" en aileron arrière ( je me suis dit que si la bete allait trop vite, ca pourrait la stabiliser dans les courbes!
)