

Bonjour à tous !
Je me présente, je m'appelle Sieg et je suis étudiante en master de conservation du patrimoine spécialisée dans la conservation des papiers et plus particulièrement des livres. Je suis passionnée par nature, et si mon métier est un joyeux mélange d'historiens, d'artistes (entendre créateurs débrouillards), et de scientifiques, je fais plutôt partie des deux premières classes. Avec la plus grande admiration que j'ai pour la technologie, et bien que je m'y intéresse, mon cerveau reste définitivement bloqué dès que je rencontre un problème de construction qui nécessite un peu d'esprit scientifique. Bref qu'est ce que je fais là ? Je me lance :
Je suis en train de reprendre un matériau synthétique homologué pour la conservation des cuirs (bon vieillissement tant qu'il ne bouge pas), que j'aimerai appliquer à la conservation des reliures de livres. Il ressemble exactement à un similicuir. Du coup, je dois tester la résistance au pliage de ce matériau. J'ai contacté à peu près tout le carnet d'adresse du CNRS pour avoir accès à un MIT folding endurance testing machine (machine de résistance au double-pli type MIT), mais je me suis heurtée à des portes fermées. (Tu m'étonnes, c'est comme parler d'histoires de bouts de couennes à la NASA.)
Bref, j'ai jusqu'à décembre pour trouver un laboratoire qui ait la machine et qui puisse m'accueillir, ou bien créer cette machine (j'ai des amis qui s'y connaissent pour bidouiller des trucs, mais ils ont besoin de savoir par où commencer et c'est là que vous intervenez!). Si je ne peux pas réaliser ces tests c'est vraiment un beau projet qui tombe à l'eau (ça a l'air pas crédible quand on ne connait pas trop le milieu, et c'est moins cool que des drones espions, mais je vous promet que ce serait un petit big bang dans le milieu de la conservation de musées!)
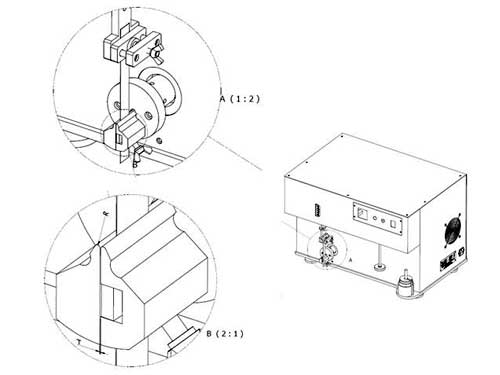
Voilà à quoi ressemble les machines originales :
les machines type M.I.T :
http://www.optest.com/KRK/Brochure_KRK2015_2016_Folding.pdf
la méthode Schopper :
http://www.distritest.fr/home/119-double-pli-schopper-frank-pti.html
Il s'agit de machines utilisées pour les tests de papier monnaie ou de cartes routières.
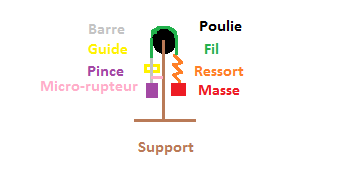
Deux pinces maintiennent un échantillon de L100xl10x2 mm environ, et créent un mouvement répété de pliage. Un compteur compte le nombre de pli et s'arrête quand il y a rupture.
Vous croyiez qu'on peut réaliser un modèle synthétisé de ces machines à 3000 balles ? Moi j'y crois mais j'ai besoin de votre aide si vous vous sentez intéressés par le sujet !
Milles mercis pour votre aide, je suis prête à tout entendre, le temps tourne !
et hop une bouteille à la mer


 Tant que c'est suffisamment précis tout en restant simple!
Tant que c'est suffisamment précis tout en restant simple!




 ).
).

 )
)
 , j'avais une vision de matos comme on utilise à la boite, avec des logiciels propriétaires. Mais dans ce cas, tout est possible.
, j'avais une vision de matos comme on utilise à la boite, avec des logiciels propriétaires. Mais dans ce cas, tout est possible.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}