Ah merde 
Un régulateur de tension ??? (je demande je débute toujours ^^)

Staff Robot Maker


Posté 04 octobre 2016 - 08:15
un convertisseur 5V je suppose .
tu branche la batterie d'un côté et de l'autre tu as 5V avec au max X ampères.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 04 octobre 2016 - 10:22
Yesssssssssssss :
Staff Robot Maker
Posté 04 octobre 2016 - 10:32
Bah dans ce cas là je vais me permettre aussi : convertisseur 5V du shop 
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 13 octobre 2016 - 11:00
Bonjour tout le monde.
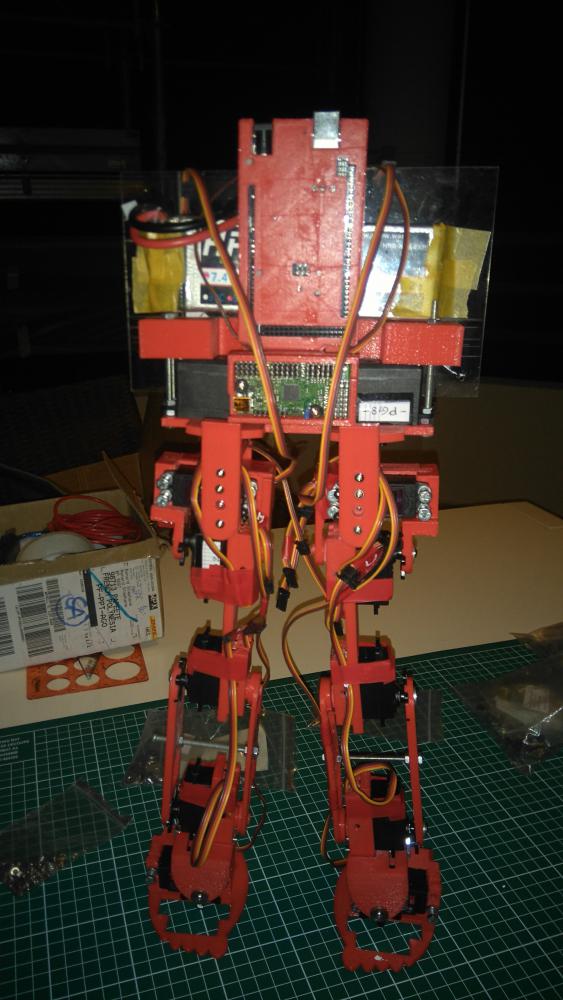
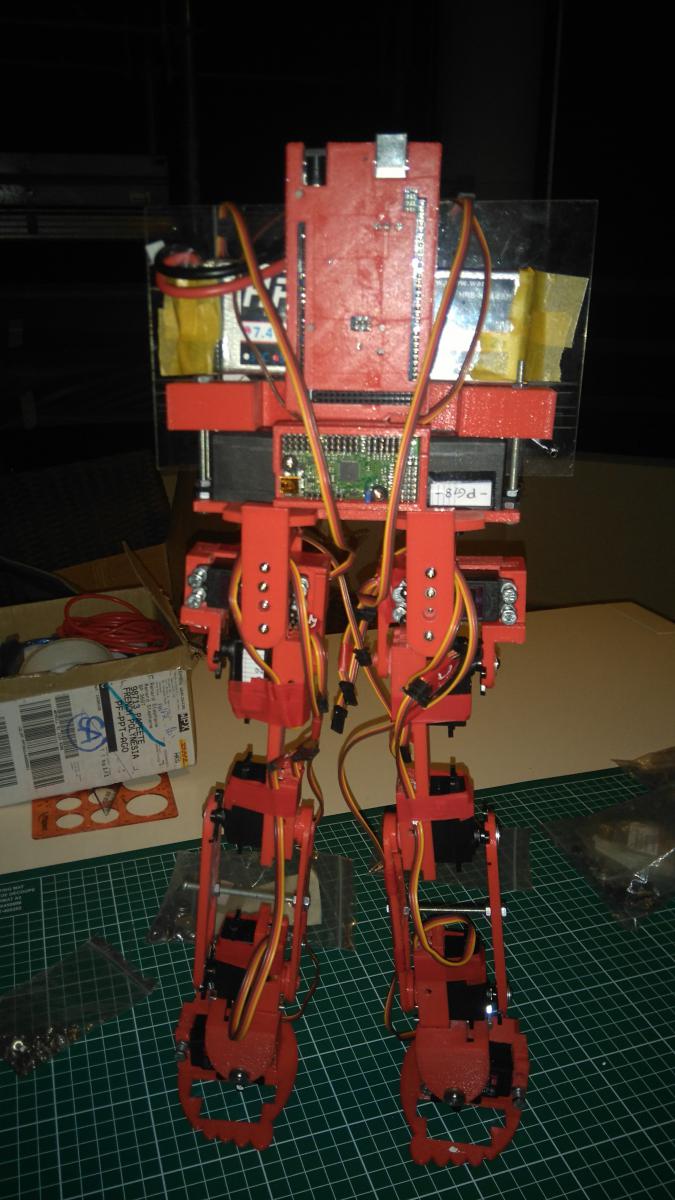
Des nouvelles de HumaOne....Celui-ci est de nouveau debout :
Les nouveaux servomoteurs ont résolu les problèmes de tremblement et de positionnement à la consigne désirée......
Il me reste à connecter tous les servomoteurs et normalement je devrais pouvoir lui faire exécuter ses premiers mouvements....ENFIN !!
J'espère que je ne vais pas avoir encore des mauvaises surprises.....Vraiment !!
Bon, je prépare l'anniversaire du petit poulet en ce moment alors ....patience.....
Pilier du forum

Posté 14 octobre 2016 - 06:28
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 14 octobre 2016 - 07:35
Parce que tu prends trop de place sur la page.....
Pilier du forum

Membre passionné
Posté 14 octobre 2016 - 09:36
ha oui il est content et adore jouer avec mon matos .....
Membre passionné
Posté 24 octobre 2016 - 09:08
Hello,
Après une longue période de préparation de l'anniversaire de mon poulet et compte tenu du temps de réalisation d'une piñata BB8 :

, je suis de retour sur mon projet.
J'ai donc modifié quelques pièces pour insérer les nouveaux servomoteurs TOWERPRO qui n'ont pas les mêmes dimensions que les towardpro. En particulier lorsque l'ont enlève le capot arrière.....Le moteur est bien plus long.
Ces nouveaux servomoteurs sont bien stables. Plus de tremblement au démarrage et surtout ils se positionnent toujours bien à la consigne demandée et se centre parfaitement à 90°.
J'ai aussi pris le temps de passer les câbles des servomoteurs un peu plus judicieusement mais ça reste encore un peu la forêt de câble.
Pendant tout ce temps j'ai quand même progressé sur le programme.....Que je vais donc tester certainement cette semaine.......J'espère enfin obtenir un ersatz de démarche humaine......
Roulement de tambour.....
Pilier du forum
Membre occasionnel

Posté 25 octobre 2016 - 05:56

Membre passionné
Posté 25 octobre 2016 - 10:33
Bon et bien voici les résultats des premiers tests....
Commençons par le positif :
Et maintenant le négatif :
Conclusion :
++
Membre passionné
Posté 28 octobre 2016 - 08:07
Bon allez encore une pièce qui vient de casser....Je pense que le PLA n'est pas adapté, pas assez solide pour supporter les contraintes :
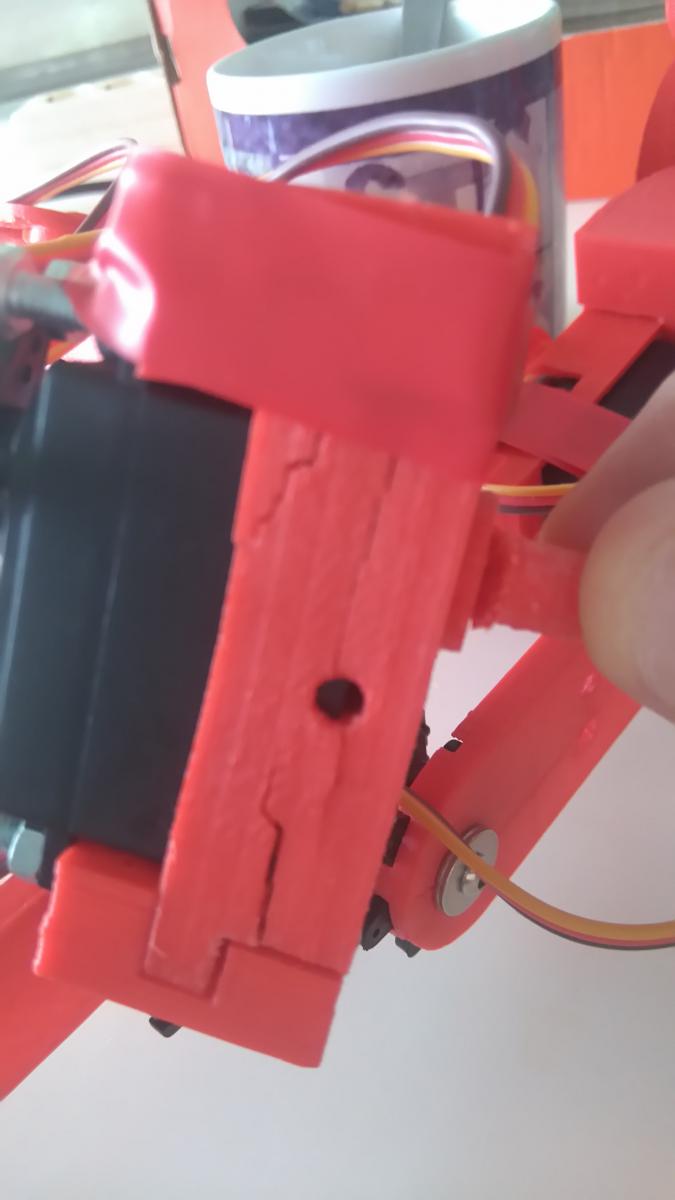
L'axe fait 8 mm de diamètre. La pièce est imprimée avec un taux de remplissage de 30%....
Je vais devoir passer en ABS peut être..........
Pilier du forum
Posté 28 octobre 2016 - 08:55
Hum, tu parles des contraintes du aux servos qui vont trop loin dans leurs courses ???
Si c'est le cas, limite les dans leurs positions final, perso je me suis inspiré du corps humain "anatomie fonctionnel" pour évaluer le degrés de liberté de mes servos (bon en théorie ça fonctionne lol reste à voir à la pratique).
Membre passionné
Posté 28 octobre 2016 - 09:55
Non mais des contraintes mécaniques trop importantes pour le PLA sauf à surdimensionner les pièces mais après sur le plan encombrement c'est pas génial...Pas assez solide, trop souple.........
Membre passionné
Posté 31 octobre 2016 - 10:39
Bon et bien maintenant j'en suis sûr !! Ma structure n'est pas bonne !! Trop souple, trop de jeu.....Il va falloir que je revois tout ça dans son ensemble.........Punaise c'est dur !!!
Rien que la batterie dans le haut du corps est un problème. Le poids embarque le robot d'un côté ou de l'autre et/ou d'avant en arrière..........
Les pieds sont trop petit et n'assure pas suffisamment de stabilité.
Les jambes et les tibias sont trop souples et subissent un effet de torsion.
Les pièces fixant les palonniers cassent et présentent trop de jeu...
Sinon je fais un wall-E, plus simple pour le déplacement sur chenille avec deux bras et une caméra ou autres systèmes de détection d'obstacle........
j'hésite.......L'utilisation de MG996R augmente considérablement le poids et leurs consommations m'oblige à avoir une grosse batterie li-po qui par conséquent augmente encore d'avantage le poids ce qui et impose une structure solide, rigide et bien ajustée....Ce qui n'est pas aussi évident que ça pour moi à réaliser.........
Bon .......Et bien il me reste à faire un choix...........J'ai pas envie de passer mille ans pour ne pas aboutir.......Je n'aime pas l'échec mais alors pas du tout...Je n'ai jamais été bon perdant et en même temps abandonner et aussi un échec........
Pfeeeeeeeee j'suis en fond de cale là !!!
++








0 members, 0 guests, 0 anonymous users