Ce sont les batteries qui font qu'il se retrouve avec trop de poids ?
Car j'imagine qu'il y a une arduino ou une pi dessus en plus, et le contrôleur de servo.
Tu crois que ça va être trop lourd à porter ? 

Pilier du forum


Membre passionné
Posté 06 septembre 2016 - 10:55
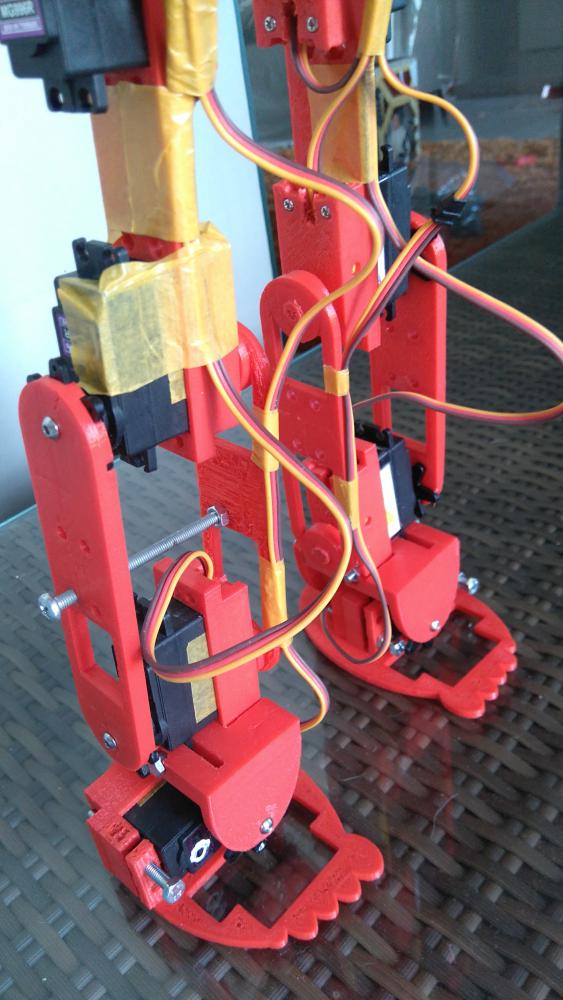
C'est surtout 6 servomoteurs par jambe et une batterie li-ion de 5Ah.....
il n'est pas lourd à porter mais son poids ne va pas faciliter son équilibre et la conso d'énergie pour bouger les jambes..............
Pilier du forum
Posté 07 septembre 2016 - 10:29
Huum les batteries, c'est clair, je ne me suis pas encore penché sur la question, mais je m'attend au pire, sinon pour les jambes j'en ai autant de prévu 
Niveau consommation tu estimes à combien l'autonomie de la batterie juste pour tes jambes ?
Vivement que je puisse m'amuser aussi ^^
Membre passionné
Posté 07 septembre 2016 - 06:48
Je pense avoir une autonomie de 40-50 mn...
Membre passionné
Posté 08 septembre 2016 - 05:18
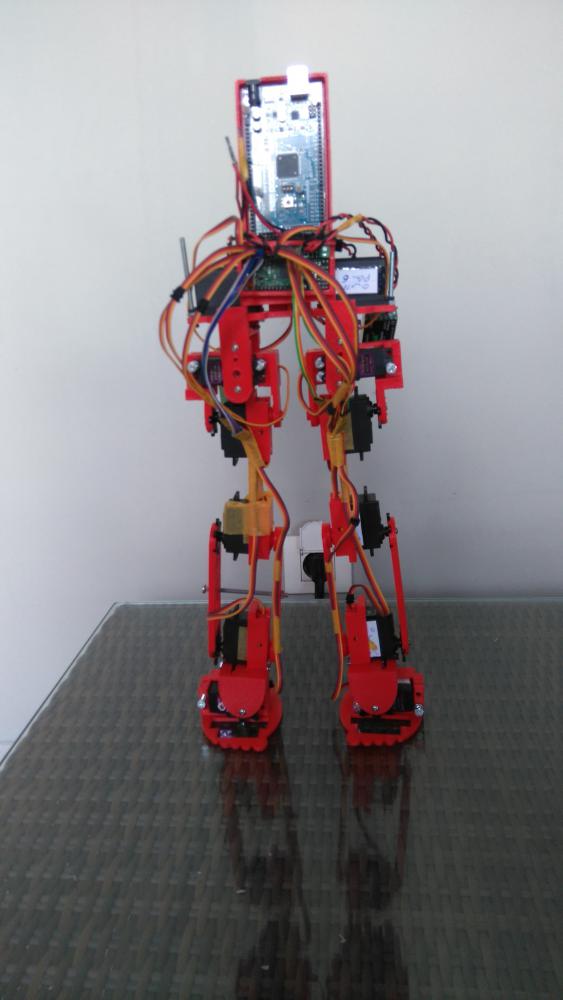
Enfin !!!
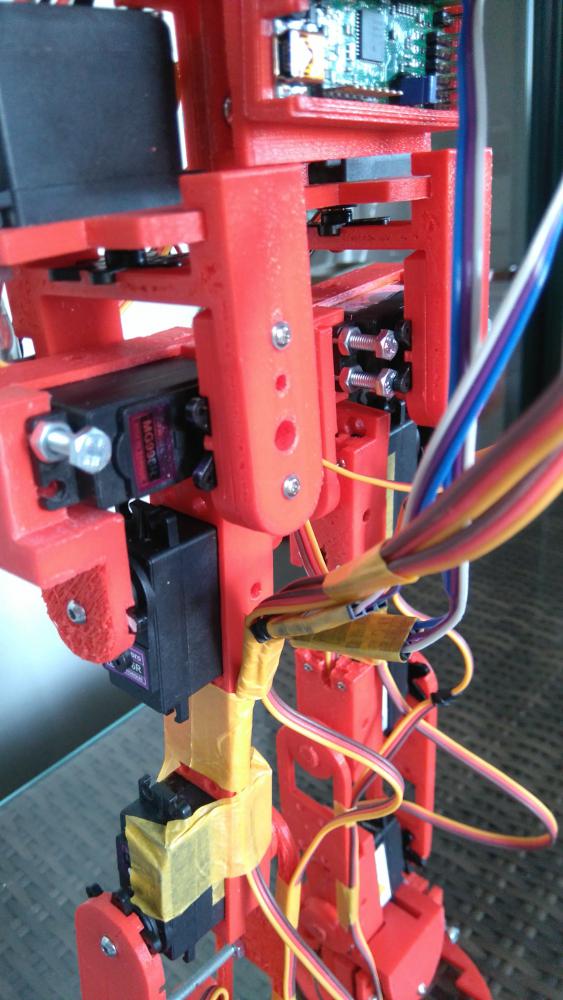
HumaOne et enfin debout......je vous livre les premières photos avec une jolie forêt de câble.....
Je ne me suis pas arraché sur le passage des câbles....Je voulais voir son fonctionnement avant tout....Et donc pour le moment la nouvelle structure à résisté à mes premiers essais......Mais j'ai toujours ce problème des Pulsemin et Pulemax qui ne sont pas constant !!
J'avais effectué des recherches, a vide, pour chaque servomoteur des Pulsemin et Pulsemax et tout noté dans un fichier excel et là en charge cela ne correspond pas......Certains servo ne vont pas à 0° ou ne vont pas à 180° ou les deux......donc pas de 90° précis non plus !!!
Forcément tous les mouvements ne sont pas bon..........PUNAISES !!!!!
DUR !!! DUR !!!
++
Pilier du forum
Posté 08 septembre 2016 - 08:49
Bizarre pour tes pulsemin et max, je n'ai pas ce prob ou alors je ne m'en suis pas rendu compte (enfin quand même si j'aurais du)
En tout cas il est sympa comme tout, merci pour les photos ^^
N'hésite pas à en poster d'autres 
Des que j'aurai fini mon imprimante, du moins quelle soit opérationnel ce sera mon tour ^^ lol
Ahhh mais ça me fait penser, j'avais aussi un soucis avec le 0 à 180 sans avoir un 90 exact, ce que j'ai fais, j'ai cherché le 90, me suis basé dessus et aux extrémité en revanche je n'ai plus de 0 et 180 mais j'ai tout de même un mini et maxi sans être à fond.
(je sais pas si suis clair).
MErci
Membre passionné
Posté 08 septembre 2016 - 09:01
Je pense qu'en charge et compte tenu de la résistance sur le moteur, le couple ne permet plus au servo d'aller à ses extrémités......Et ce même quand tu lui donnes la bonne consigne....c'est la cata !!
En tout cas je ne vois que ça comme explication puisque à vide sur mon banc de test, les servo vont bien à leurs extrémités min (0°) et max (180°)...
En trouvant la position 90° sans se préoccuper du 0° et 180° je ne sais pas si il y toujours possible de faire bouger son servo à un angle précis. La fonction map étant directement liée justement à ces deux bornes extrêmes....
long map(long x, long in_min, long in_max, long out_min, long out_max)
{
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
Membre passionné
Posté 08 septembre 2016 - 06:56
Je vais faire des essais complémentaires....Sur chaque jambe je n'ai qu'une pièce à enlever pour tester, a vide, les servomoteurs des genoux et des chevilles.......Peut être ce soir.....
++
Membre passionné
Posté 17 septembre 2016 - 02:18
Punaise de Punaise de nom d'une PUNAISE !!
Je ne m'en sors pas avec mes servomoteurs..............Ils n'ont jamais les mêmes pulsemin et pulsemax............A chaque fois que je redémarre ma carte pololu les valeurs changent..........Donc quand j’exécute les mouvements des jambes et bien je n'ai jamais les mêmes positions..........
Bon, après un peu de lecture sur la toile il semblerait que les servomoteurs towardpro (clône towerpro) que l'ont trouve pour 5€ sur alibouze soit à l'origine de cette problématique....d'autant que la position 90° n'est pas toujours non plus constante et/ou ne correspond pas au calcul avec la fonction map.
Il va falloir que j'investisse dans la véritable marque towerpro....Reste encore à savoir si il livre en Polynésie......
Ca me saoule de perdre du temps avec ça............
++
Pilier du forum
Posté 17 septembre 2016 - 07:15
Désolé mais j'ai envie de dire punaise moi aussi (juste pour rester poli), tu me fais peur avec tes histoires de servomoteurs, ben je sais que ceux que j'ai tiennes le coup et envoient du paté, mais bon, suis pas un expert, je crois que j'ai eu du bol de bien tombé.
Perso j'ai pris des MD1501 analogique.
Ouais je te comprend, perdre du temps pour ça un peu comme moi avec la PCA9685 avant que vous m'aidiez tous pour la faire fonctionner
Courage copain maker's ^^
Membre passionné
Posté 17 septembre 2016 - 08:06
Merci.............Mais il faut que je commande des servo de même taille maintenant si je ne veux pas réimprimer toutes mes pièces donc ce sera certainement des MG996R MAIS acheté directement chez le fabricant............
Membre passionné
Posté 18 septembre 2016 - 11:01
Bon je viens juste de commander 12 servomoteurs mais cette fois des originaux tower pro sur hobbyking et pas des towar pro !!!
J'espère que je ne vais pas être déçu car madame commence à trouver la facture salé..........
Membre passionné
Posté 18 septembre 2016 - 09:44
Madame est comptable !!!
Il faut s'assurer d'avoir la marque Tower Pro sur le boitier plastiques at le sticker QC....Prix unitaire = 9.95$....
J'espère que je ne vais pas déchanter.........
Pilier du forum
Membre passionné
Posté 19 septembre 2016 - 12:21
Il y à toujours des avantages et des inconvénients...Chez une femme ...Mais je n'en dirais pas plus......
Bon, sinon dès réception des servo je vous tiendrais forcément au jus car j'ai vraiment hâte de finaliser la programmation et autres idées.....








0 members, 0 guests, 0 anonymous users