


Voilà mon premier 'robot', Aroll :
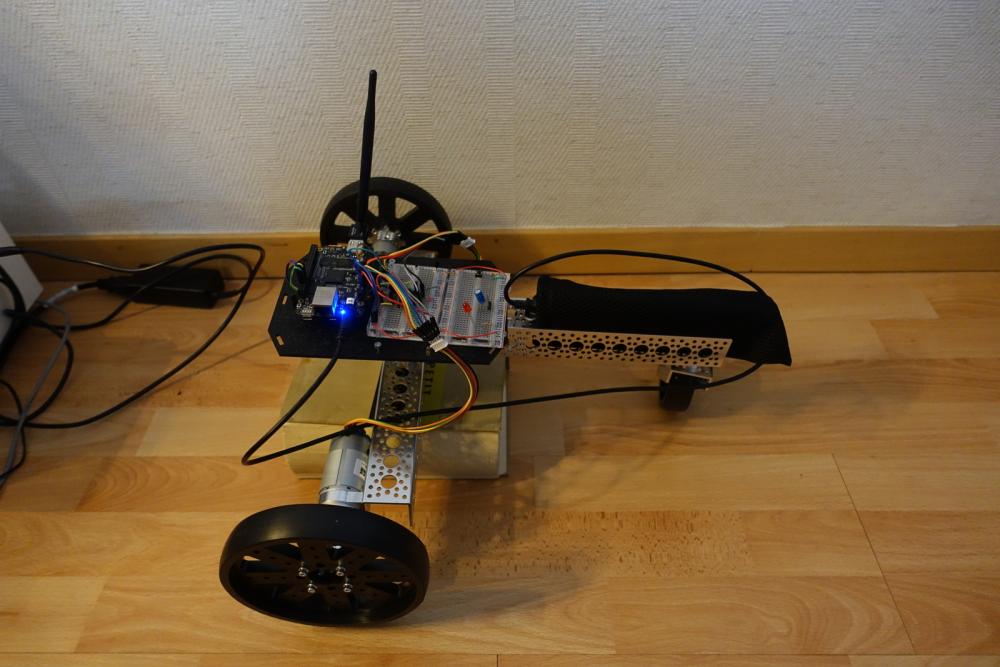
Rien de bien compliqué, c'est principalement un robot d'apprentissage.
Coté matériel, pas de soudure et que du démontable :
- Une base actobotics.
- 2 moteur 12V sous-alimenté avec encodeurs
- Une batterie USB 5V
- Un pont en H, LD293 pour le control des moteur.
- Un BeagleBoneBlack pour le sofware.
Coté software :
- Ubuntu 16-04 avec les overlay necessaire au PWM et au controle GPIO
- ROS : Robot operating system
- 2x node ROS de lecture des encodeurs et conversion en vitesse
- 2x node ROS de controle des moteur, avec PID
- 1 node ROS de conversion de commande de déplacement en vitesse moteur gauche et droite.
Le controle se fait a travers le wifi par un node ROS de teleoperation, pour l'instant au clavier
Ce robot joue son rôle éducatif pour moi, en particulier pour les environnement de développement de beaglebone et ROS.
Prochaines étapes :
- Evaluation de sa position, et controleur pour atteindre une position proposée par l'utilisateur
- Ajout de détécteur de distance infrarouge, et detection d'obstacle.
- Controlleur pour contourner les obstacles.
- Utilisation des librairies de reconstruction d'environment (SLAM)
Et après cela, ce sera une photos finale et le démontage pour attaquer un deuxième type de robot.



 . Mais ca me suffit pour debugger le software.
. Mais ca me suffit pour debugger le software.



















