


Voilà mon nouveau projet éducatif, pour m'éduquer moi, surtout :
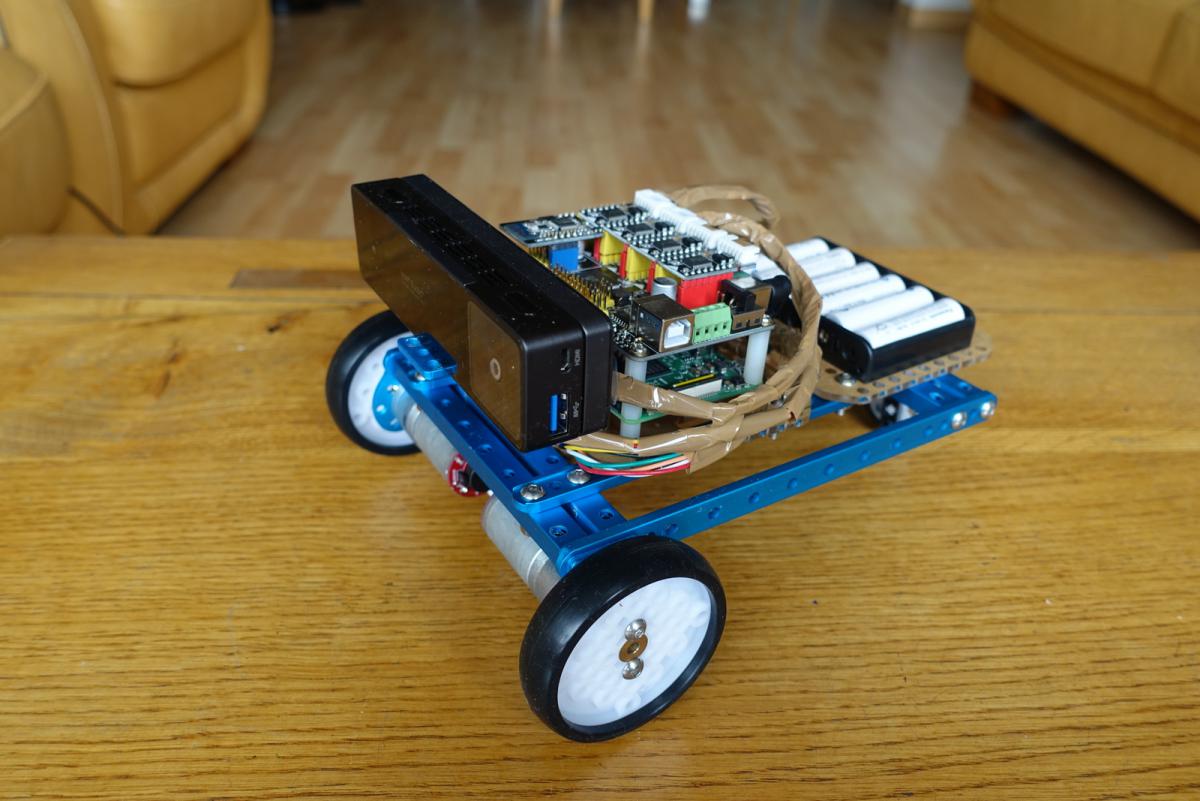
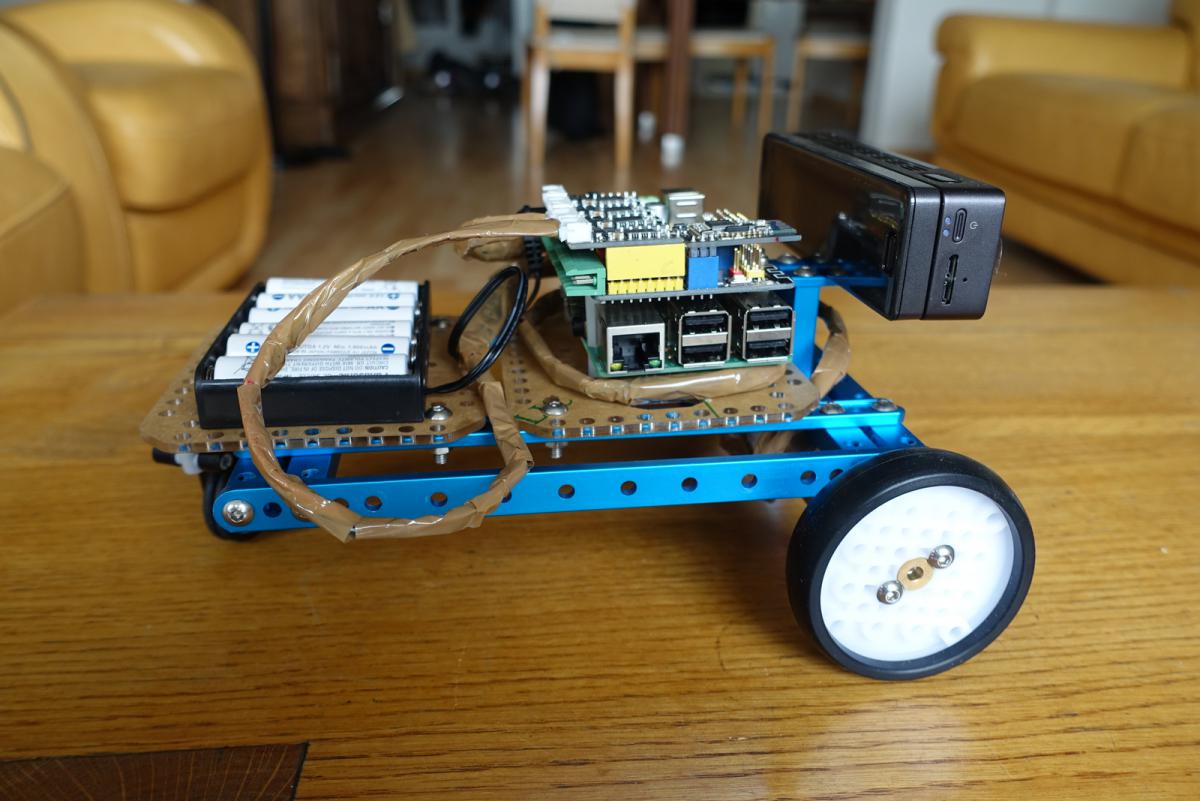
Le robot se compose :
- D'un kit de développement Intel Euclid :
C'est un kit tout en un, incluant un module realsense ( perception de profondeur, comme la kinect), deux caméra, un mini-PC, une batterie, et de multiple capteurs, dont un gyroscope/accéléromètre
- Une carte Makeblock MegaPi
Elle est compatible Arduino Mega, et inclu entre autres des driveurs moteurs.
- Une raspberry PI 3
- De la mécanique Makeblock
- Les moteurs du magasin robot-maker (lien).
J'ai cassé un des moteurs du kit , mais ceux du magasin sont compatibles juste en créant un connecteur pour remappé les fils correctement.
Mes objectifs principaux avec ce robot sont d'apprendre et mettre en oeuvre toutes les techniques de mapping et localisation, type SLAM, et de mettre en oeuvre des algorithmes videos, type reconnaissance d'objet, de personne.
C'est aussi l'occasion de continuer à me plonger dans l'univers ROS, l'Euclid étant fournis avec de nombreux 'noeux' ROS pour les différents éléments.
Le robot lui-même risque de se transformer en robot 'joueur', par exemple je vais essayer de me faire ramener une balle que j'ai lancer. (il me manque quelques actionneurs bien sur).
Voilà une première démonstration, elle utilise une partie des noeuds ROS fournis avec l'Euclid pour faire de la détection d'obstacle avec le capteur de profondeur, ainsi que leur algorithme d'évitement. Seul les noeuds ROS pour actionner les moteurs sont codé maison, en utilisant rosserial pour accéder a l'Arduino.
Toutes les sources du projet : https://github.com/Bobox214/Dovlo








 Je ne connais pas beaucoup de tutoriel sur ROS en français =) Ni de bouquin d'ailleurs ... =) Pour ma part j'hésitais à me prendre
Je ne connais pas beaucoup de tutoriel sur ROS en français =) Ni de bouquin d'ailleurs ... =) Pour ma part j'hésitais à me prendre 









![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)



