

Bonjour à tous,
j'essaie de me fabriquer depuis quelques temps un stabilisateur gimbal pour APN sur 3 axes, bien que n'ayant aucune base en electronique et programmation au départ.
Pour faire simple j'ai en ma possession :
- une armature
- 3 moteurs brushless Turnigy 5208
- 3 ESC Afro12a
- des arduinos mini pro 5v
- 1 batterie Turnigy 3s 20-30C de 2700mAh
- 1 IMU 9250
j'ai réussi à programmer correctement l'arduino pour avoir la déclinaison le roulis et le tangage sans dérive .
J'ai flashé mes afro 12a avec le dernier blheli (voici les réglages)
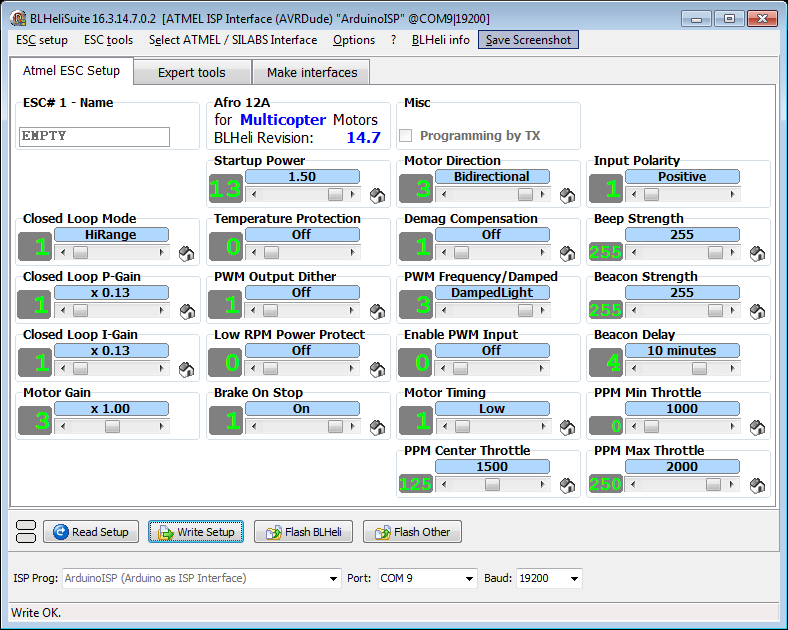
pour avoir un changement de direction le plus rapide possible,
seulement à un taux de changement élevé (disons 1/100 de seconde) le moteur ne suit pas mes demandes, et le changement se fait au gré de l'ESC.
Je souhaite aussi me servir d'un joystick, mais a basse vitesse les moteurs ne se déplacent pas ou mal ( sacades).
J'imagine que les firmwares blheli ou simonk ne sont pas pour les gimbals. N'est il pas possible de les modifier pour ma configuration ? Ou/et bien dois je lorgner sur d'autres ESC ?


 ) mais une chose dont je me souviens c'est que les moteur brushless qui sont utilisés (comme celui que tu utilises) ont une resistance interne par bobinage une dizaine de fois plus élevée que sur un moteur brushless classique.
) mais une chose dont je me souviens c'est que les moteur brushless qui sont utilisés (comme celui que tu utilises) ont une resistance interne par bobinage une dizaine de fois plus élevée que sur un moteur brushless classique.

















