
J'essai de suivre votre fil  J'ai peut-être raté un truc. Dîtes, vous prévoyez quoi pour détecter les fins de courses notamment le z ?
J'ai peut-être raté un truc. Dîtes, vous prévoyez quoi pour détecter les fins de courses notamment le z ?

842 réponses à ce sujet
#381

Path
-

- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 27 mars 2017 - 07:35
#382
levend
-

- Membres
-
- 5â¯725 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 27 mars 2017 - 07:43
Pour le moment il n'y a pas de fin de course 
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#383
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 mars 2017 - 08:11
On voit bien que tu n'as pas une Dagoma.Je ne pense pas que cela soit utile de mettre un tel système en place. C'est un problème qui est vraiment rare. Très rare.
Sur une imprimante classique, c'est pas trop grave, encore que... Mais sur une imprimante de cette taille, le moindre effort sur la structure pourrait avoir un impact négatif. De plus, ce n'est pas parce que l'on ne voit pas les contraintes, qu'elles n'existent pas et que le mal n'est pas déjà fait.
Je ne pense pas que ma solution soit très compliquée, 4 charnières, 4 glissières et quelques centimètres de profilés supplémentaires, et au final, la tranquillité d'esprit.
Oui Path, on mettra des fins de course, pas d'inquiétude.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#384
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 mars 2017 - 07:27
Voici quelques vidéos pour argumenter mon idée de résoudre le problème d'une éventuelle désynchronisation des 2 moteurs de l'axe Z.
Dans ces vidéos on voit que le problème a été résolu en ne mettant qu'un seul moteur pour l'axe Z.
Il n'y a que sur des Core XY que je n'ai vu qu'un seul moteur pour l'axe Z. Dans toutes les autres imprimantes classiques telle que ma Dagoma, il y a 2 moteurs.
A mon avis, ce problème est beaucoup plus critique sur une Core XY car dans ce cas, le plateau en montant avec un plan incliné arquerait l'ensemble des structures verticales de l'axe Z vers le centre de l'imprimante.
Sur une imprimante classique, les 2 barres qui portent la tête doivent rester simplement dans leur logement, l'important c'est qu'elles restent parallèles. Peu importe que le plan définit par les 2 barres soit incliné. A l'extrême, elle sortiraient de leur logement. Au pire, elles pourraient s'endommager elles même, mais pas la structure de l'axe Z.
L'imprimante de Bassetti :
L'imprimante d'Easy 3D :
L'imprimante de Tech2C :
Dans ces vidéos on voit que le problème a été résolu en ne mettant qu'un seul moteur pour l'axe Z.
Il n'y a que sur des Core XY que je n'ai vu qu'un seul moteur pour l'axe Z. Dans toutes les autres imprimantes classiques telle que ma Dagoma, il y a 2 moteurs.
A mon avis, ce problème est beaucoup plus critique sur une Core XY car dans ce cas, le plateau en montant avec un plan incliné arquerait l'ensemble des structures verticales de l'axe Z vers le centre de l'imprimante.
Sur une imprimante classique, les 2 barres qui portent la tête doivent rester simplement dans leur logement, l'important c'est qu'elles restent parallèles. Peu importe que le plan définit par les 2 barres soit incliné. A l'extrême, elle sortiraient de leur logement. Au pire, elles pourraient s'endommager elles même, mais pas la structure de l'axe Z.
L'imprimante de Bassetti :
L'imprimante d'Easy 3D :
L'imprimante de Tech2C :
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#385
Donovandu88
-

- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 28 mars 2017 - 05:08
Au pire tu met une courroie fermé entre tes deux moteurs Z.
#386
Mike118
-

- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 mars 2017 - 05:59
1 seul moteur et une courroie qui entraîne les deux tiges filetées tu veux dire ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#387
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 mars 2017 - 06:40
Moi qui trouvais mon système mécaniquement, très simple.
Un seul moteur ?
Sur les imprimantes classiques, il y en a 2, alors qu'elles ne soulèvent même pas la pièce.
Je ne connais pas la puissance de ces moteurs, mais intuitivement, je pense que 2 moteurs, c'est mieux.
Un seul moteur ?
Sur les imprimantes classiques, il y en a 2, alors qu'elles ne soulèvent même pas la pièce.
Je ne connais pas la puissance de ces moteurs, mais intuitivement, je pense que 2 moteurs, c'est mieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#388
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 28 mars 2017 - 07:32
1 seul moteur et une courroie qui entraîne les deux tiges filetées tu veux dire ?
Non deux moteurs mais et la courroie c'est pour être sur qu'ils ne se désynchronisent pas.
#389
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 mars 2017 - 08:35
A mon avis, pas très orthodoxe comme solution. On peut coupler des moteurs à courant continu, mais des moteurs pas à pas, je n'en suis pas vraiment certain.Non deux moteurs mais et la courroie c'est pour être sur qu'ils ne se désynchronisent pas.
Ce problème, j'y pense depuis le début. J'y ai réfléchi des jours et même des nuits.
Quand j'ai trouvé la solution, surtout quand j'ai vu la vidéo sur les glissières, j'ai eu l'impression d'avoir fait une avancée majeure.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#390
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 mars 2017 - 09:08
1 seul moteur avec un rapport de réduction et tu as le couple que tu veux si c'est ce qui t'effraie ... par contre tu seras plus lent pour monter et descendre le plateau .
L'ultimaker 3 n'a qu'un moteur pour le Z ...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#391
levend
-
- Membres
-
- 5â¯725 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 28 mars 2017 - 09:15
A mon avis, pas très orthodoxe comme solution. On peut coupler des moteurs à courant continu, mais des moteurs pas à pas, je n'en suis pas vraiment certain.
Euh, ce procédé est utilisé sur les CNC amateur depuis des années et cela a évité bien des soucis à certains.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#392
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 29 mars 2017 - 07:30
Ok. Supposons que l'on parte sur l'idée de la courroie avec 2 moteurs ?Euh, ce procédé est utilisé sur les CNC amateur depuis des années et cela a évité bien des soucis à certains.
Voici la poulie pour un Nema17, http://www.motedis.fr/shop/Dynamic-unites-lineaire/Courroies-dentees-et-roues-a-dents/Type-HTD-3M-9mm-D5-Nema-17/Courroie-de-poulie-HTD3M-32-dents-pour-ceinture-9mm-large-NEMA17::999993726.html

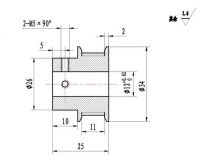
Cette poulie prend l'ensemble de l'axe du Nema17. Il ne reste plus rien pour le coupleur avec la vis!
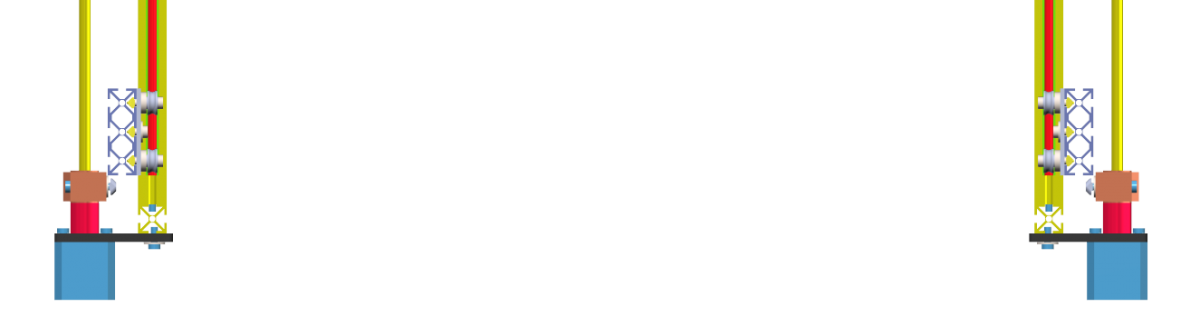
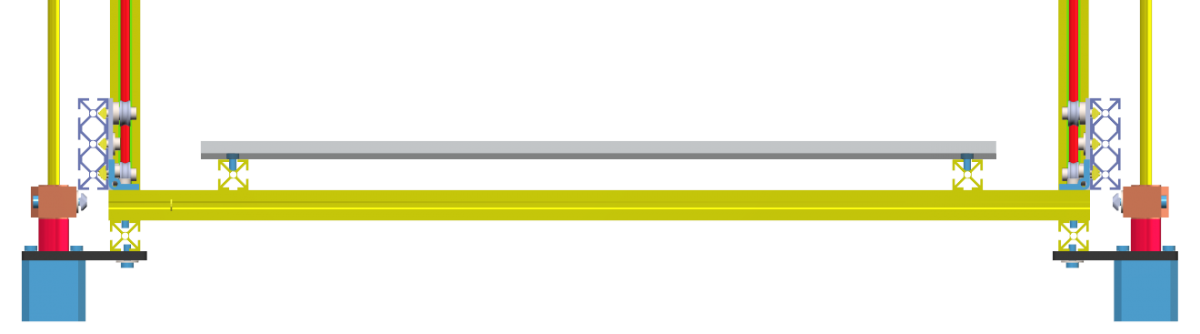
Je vous remets 2 images, la structure de base et celle avec ma solution. (malgré ce que l'on voit, les structures sont strictement égales)
Attention, dans ma solution, le schéma est faux, l'ensemble chariots du Z et plateau doivent être relevés d'environ 10mm pour éviter que les paires de bras ne touchent le profilé sur lequel est fixé le moteur, en cas de rotation de la charnière.
Cliquez moi.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#393
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 02 avril 2017 - 10:14
Tu as trouver une solution?
#394
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 avril 2017 - 11:49
Tu m'as grillé ! Non, je n'ai pas trouvé d'autre solution.Tu as trouver une solution?
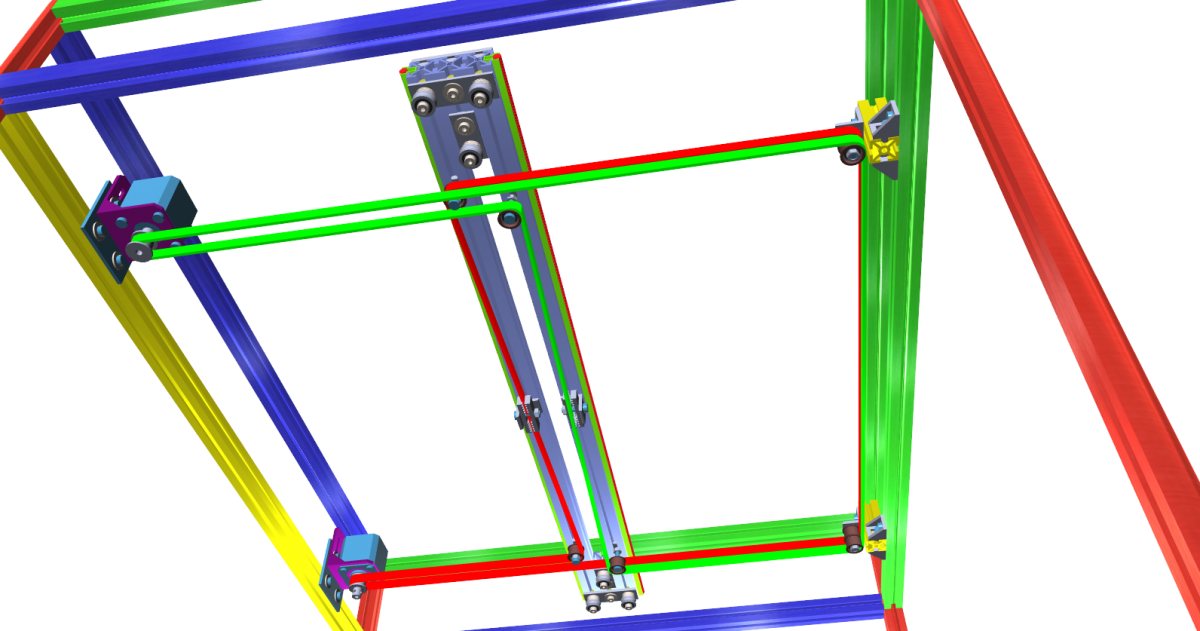
Je viens de terminé la mise au point du mécanisme Core XY. J'ai bossé comme un fou sur le projet ces derniers jours, une vraie galère pour tout aligner, d'autant que j'ai des ralentissements de 123D que je ne m'explique pas, même pour sauvegarder, il doit y avoir quelque chose qu'il n'aime pas.
Voici une photo du mécanisme.
Cliquez moi.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#395
levend
-
- Membres
-
- 5â¯725 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 02 avril 2017 - 12:04
Je vois que ça avance mais tu fais toujours les même erreurs entre course et encombrement, tu verras lors de la construction .
J'ai cessé de modéliser puisque l'on part chacun dans notre direction et comme c'est ta machine je te laisse faire les choix mais je continue à suivre...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#396
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 avril 2017 - 01:28
Peut-être que je n'ai pas le sens du travail d'équipe, c'est possible.Je vois que ça avance mais tu fais toujours les même erreurs entre course et encombrement, tu verras lors de la construction
J'ai cessé de modéliser puisque l'on part chacun dans notre direction et comme c'est ta machine je te laisse faire les choix mais je continue à suivre...
A ma décharge, je dirais que j'ai dû tellement me soumettre aux contraintes et aux avis des autres dans ma vie professionnelle, qu'aujourd'hui, à la retraite, j'ai pris goût à la liberté de faire les choses à mon idée. Cela ne me réussit pas trop mal.
Par contre, oui je m'aperçois que je vais devoir mettre les moteurs dans l'autre sens.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#397
levend
-
- Membres
-
- 5â¯725 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 02 avril 2017 - 05:26
Il y a aussi le fait que Solidworks ne tourne pas sur mon PC portable qui me sert très souvent, sinon la modélisation serait terminée et on aurait pu comparer nos projets.
Et bien moi, dans ma vie professionnelle je ne suis plus soumis à quoique ce soit, peut-être un peu dommage mais bon je vois le bon côté des choses : le moral remonte (avant de chuter en fin d'année)...
Retourner le moteurs est une possibilité tout en les rapprochant de l'angle. En les rapprochant de l'angle (retourné ou non) tu gagneras en course pour le chariot mais pour cela il ne faut pas fixer les poulies sous le profilé mais sur le côté avec des équerres comme sur la Gantry de Motedis. Il faudra mettre des axes du rail moins long pour fixer les équerres mais comme c'est la position des poulies qui va limiter la course il seront toujours un peu longs.
Au fait tu vois que 123D peut être lent
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#398
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 avril 2017 - 06:01
Je vais revoir tout ça.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#399
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 02 avril 2017 - 07:11
La disposition de tes courroies n'est pas en Core XY. Tu t'es référé à quel schéma?
#400
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 06:12
J'ai copié l'installation de Bassetti.La disposition de tes courroies n'est pas en Core XY. Tu t'es référé à quel schéma?
Je sais qu'il y a un piège, mais impossible de retrouver le lien où on en parle.
Pourrais-tu m'aiguiller ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos






1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

