

Il y a aussi les motoreducteurs avec moteur rs775 qui sont des moteurs plutôt puissant et pas cher.

85 réponses à ce sujet
#22

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 juillet 2018 - 04:27
Sur eBay, on trouve des moteurs d'essuie glace ou des lèves vitre à environ 50€, neufs. Et à moins de 30€, d'occasion.
Sinon, ce genre de chose peut également être intéressant, https://www.robotsho...-4166oz-in.html
Sinon, ce genre de chose peut également être intéressant, https://www.robotsho...-4166oz-in.html
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#23
Ulysse
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 11 juillet 2018 - 04:53
Tu peux le faire aussi avec un moteur de lève vitre de voiture ça un très fort couple puisqu'il faut soulever une vitre de voiture qui pèse très lourd le problème c'est le prix neuf environ 150 euros mais dans une casse ça peux le faire
Tout à fait. Le moteur de lève vitre tourne toutefois un peu plus vite, à peu près 3 tours par seconde. Une particularité : un enrouleur de câble. Pour soulever quelque chose par exemple.
- Amhnemus aime ceci
#24
Forthman
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 11 juillet 2018 - 10:00
perso je trouve qu'utiliser une carte arduino pour faire ça c'est un peu comme vouloir tuer un moustique (c'est la saison) avec un tank,
mais je reconnais que la simplicité de mise en oeuvre pousse au crime
#25
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 juillet 2018 - 02:53
perso je trouve qu'utiliser une carte arduino pour faire ça c'est un peu comme vouloir tuer un moustique (c'est la saison) avec un tank,
mais je reconnais que la simplicité de mise en oeuvre pousse au crime
Oui mais ... il montre comment le faire avec une uno, rien ne t'empêche par la suite de te faire ta propre carte avec l'Atmega 328p dessus, voir d'utiliser une nano, voir une pro mini ... Voit utiliser un atmega beaucoup plus petit ... De toute façon quand tu ouvre un servo c'est un micro contrôleur + driver que tu retrouves dedans ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#26
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 21 juillet 2018 - 06:35
J'inaugure ce nouveau fil où l'on pourra parler de tout ce qui est tests et technique des servos.
J'ai pensé qu'un nouveau fil dédié serait intéressant suite au problème de vibration d'Oliver.
Je suis conscient qu'un autre fil sur les servos existe déjà, mais il est plutôt dédié à la présentation des servos que l'on trouve sur le commerce.
J'ouvre le feu avec cette vidéo où le gars montre comment on peut retirer toute l'électronique d'un servo et la remplacer avantageusement par un Arduino.
Il fait un comparatif entre son montage et son programme et le servo d'origine.
Devinez qui remporte la palme !
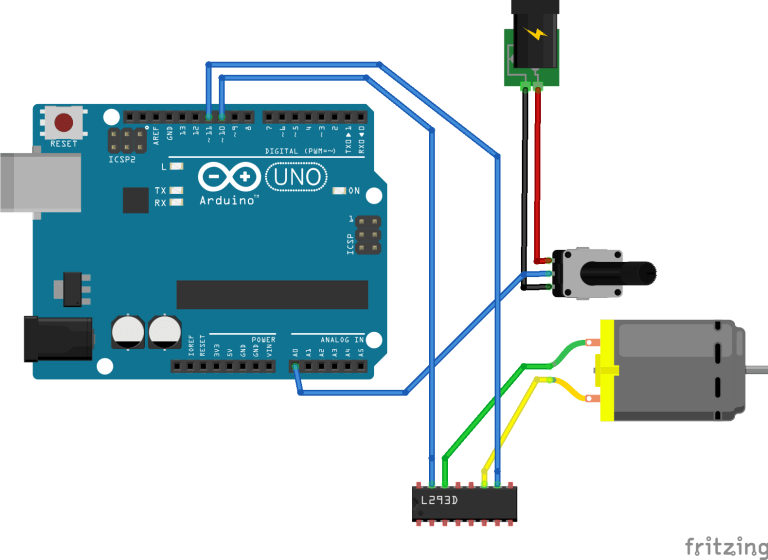
Sur ce lien vous trouverez le shéma de montage et le programme : https://backyardrobo...t-servo-motion/
J'ai pensé qu'un nouveau fil dédié serait intéressant suite au problème de vibration d'Oliver.
Je suis conscient qu'un autre fil sur les servos existe déjà, mais il est plutôt dédié à la présentation des servos que l'on trouve sur le commerce.
J'ouvre le feu avec cette vidéo où le gars montre comment on peut retirer toute l'électronique d'un servo et la remplacer avantageusement par un Arduino.
Il fait un comparatif entre son montage et son programme et le servo d'origine.
Devinez qui remporte la palme !
Sur ce lien vous trouverez le shéma de montage et le programme : https://backyardrobo...t-servo-motion/
- Mike118, thermo_nono et Oliver17 aiment ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#27
thermo_nono
-

- Membres
-
- 825 messages
Membre passionné
Posté 21 juillet 2018 - 07:01
cool cette bidouille.. par contre pour le schéma ils auraient pu ajouter un signal PWM entre l'arduino et le L293D.
et je poursuit avec un lien vers une autre bidouille : Modification d'un servomoteur en servomoteur à rotation continue
- Oracid aime ceci
#28
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn


#29
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 21 juillet 2018 - 08:06
Le bruit, ne serait-il pas généré par une vibration ?Euh mais je n'ai pas de problème de vibration, mais de bruit
Edit : Ashira avait déjà expliqué comment récupérer la positon en soudant un fils au potard.
Tu nous mets le lien vers le post d'Ashira ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#30
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 21 juillet 2018 - 08:13
Tu nous mets le lien vers le post d'Ashira ?
#31
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 21 juillet 2018 - 08:14
Je ne comprends pas les pins 10 et 11 sont connectées aux L293D. Que veux tu dire ?cool cette bidouille.. par contre pour le schéma ils auraient pu ajouter un signal PWM entre l'arduino et le L293D.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#33
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 21 juillet 2018 - 10:55
Je ne comprends pas les pins 10 et 11 sont connectées aux L293D. Que veux tu dire ?
Oops ! En effet j'ai dis une bêtise.. désolé. ^^
Edit :
Oops ! En effet j'ai dis une bêtise.. désolé. ^^
Ha ben non... pour commander le L293D on envoie un signal entre les inputs 1&2 (pattes 2 et 7) qui indiquent le sens de rotation du moteur et on applique le PWM sur la broche 1...
ou alors je suis en train de dire encore une bêtise.. ^^ ( https://wiki.mchobby...le=Pont-H_L293D )
Non le bruit n'est pas généré pas une vibration.
Je n'ai pas suivi cette histoire de bruit, mais si ça tombe, tu trouvera en bas du lien que je viens de poster un truc sur le déparasitage des moteurs... sait-on jamais...
#34
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 22 juillet 2018 - 06:58
Il laisse la patte 1 du L293D en l'air, elle est donc à 1, mais ce n'est pas très propre.Ha ben non... pour commander le L293D on envoie un signal entre les inputs 1&2 (pattes 2 et 7) qui indiquent le sens de rotation du moteur et on applique le PWM sur la broche 1...
ou alors je suis en train de dire encore une bêtise.. ^^ ( https://wiki.mchobby...le=Pont-H_L293D )
De plus, il lit un signal PWM sur la pin 7, "const byte channel_pin = 7;" alors qu'elle est connectée à rien.
Je lui ai posé les questions.
C'est quoi ce type d'instruction, "c = ;" ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#35
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 22 juillet 2018 - 07:59
thermo_nono a raison, par contre sur le petit dessin c'est le 2eme pont en H qui est utilisé (la pin 1 est en bas à gauche)
Il aurait pu utiliser une port NON sur input4 (ou input3 au choix) pour libérer une sortie, et l'utiliser en PWM sur la pin Enable
#36
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 22 juillet 2018 - 11:14
Si je ne trompe pas, c'est plutôt en haut à droite.(la pin 1 est en bas à gauche)
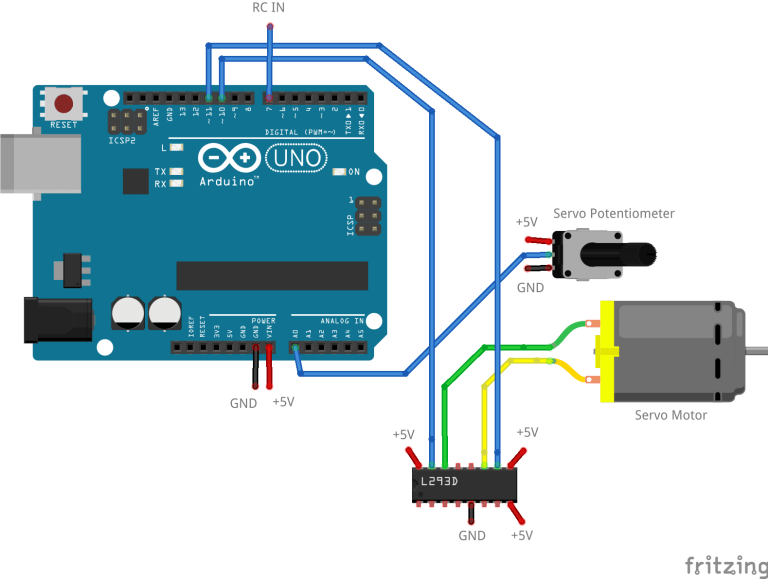
Suite à mes questions, il a modifié son schéma, qu'en pensez vous ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#37
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 22 juillet 2018 - 11:17
.. allons un petit peu plus loin dans le trip servomoteur :
Maxi Servo DIY
#38
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 22 juillet 2018 - 11:35
Suite à mes questions, il a modifié son schéma, qu'en pensez vous ?
il a juste indiqué les +5V et GND qu'il n'avait pas mis auparavant par souci de clarté.. je me demande encore laquelle de sa méthode ou de la mienne est la meilleure... après tout il envoie le PWM en commande ce qui se répercute sur les sorties vers le moteur.. moi j'adressais juste une info sur le sens de rotation en commande et j'envoie le PWM sur le circuit puissance ce qui, au final doit revenir à peu près au même.
J'aimerai avoir une confirmation car je dis et fais souvent des âneries.. et j'utilise deux L293D dans mon prochain robot.
EDIT :
Dites moi les makers... ça vous brancherait un projet collectif pour réaliser un "servomoteur à rotation continue sur une base d'ATtiny en virant le potar pour le remplacer par un encodeur (potar à 360°) et adressable en I²C" ?...
- Forthman aime ceci
#39
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 juillet 2018 - 02:50
EDIT :
Dites moi les makers... ça vous brancherait un projet collectif pour réaliser un "servomoteur à rotation continue sur une base d'ATtiny en virant le potar pour le remplacer par un encodeur (potar à 360°) et adressable en I²C" ?...
Moi je suis  ( En plus j'ai déjà réalisé un projet du style pour 2 moteurs avec une pro mini )
( En plus j'ai déjà réalisé un projet du style pour 2 moteurs avec une pro mini )
- thermo_nono aime ceci
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

