
Perso je regarde ^^

85 réponses à ce sujet

#42

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 22 juillet 2018 - 06:20
Bien sûr ! D'autant que je me suis toujours demandé pourquoi personne ne faisait des servos en I2C, compatible EV3.Dites moi les makers... ça vous brancherait un projet collectif pour réaliser un "servomoteur à rotation continue sur une base d'ATtiny en virant le potar pour le remplacer par un encodeur (potar à 360°) et adressable en I²C" ?...
Jusqu'à aujourd'hui, je n'avais jamais entendu parler de l'ATtiny. J'ai trouvé ça, https://arduino103.b...ec-arduino.html
Perso, je suis partant, mais je vais surtout vous regarder. Si vous avez acceptez les admirateurs, je veux bien faire partie du fan club.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#43
Forthman
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 22 juillet 2018 - 10:25
Si je ne trompe pas, c'est plutôt en haut à droite.
Suite à mes questions, il a modifié son schéma, qu'en pensez vous ?Compliant Servo Motion v2.png
Sur un Circuit Intégré DIP la broche 1 est toujours en bas à gauche (avec le repère à gauche)
un petit wiki qui va bien : https://fr.wikipedia..._Inline_Package
Avec ses ajouts, il a mis la broche 9 (enable) au +5v donc activée
Je serais plus partant comme je l'avais dit plus haut d'utiliser une porte NON pour inverser le
signal de la 2eme broche input, et d'utiliser une sortie PWM sur la broche ENABLE
edit : je n'avais pas vu la réponse de thermo_nono, je suis d'accord avec lui ;-)
- Oracid et thermo_nono aiment ceci
#44
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 23 juillet 2018 - 06:18
Ok, je comprends. Il utilise donc bien le 2eme pont en H.
S'il avait utilisé une porte NON cela n'aurait-il pas compliqué le schéma par l'ajout d'un autre circuit ?
Y a t-il une contre indication à la méthode qu'il utilise ?
Sinon, c'est quoi ce type d'instruction, "c = ;" ?
S'il avait utilisé une porte NON cela n'aurait-il pas compliqué le schéma par l'ajout d'un autre circuit ?
Y a t-il une contre indication à la méthode qu'il utilise ?
Sinon, c'est quoi ce type d'instruction, "c = ;" ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#45
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 23 juillet 2018 - 11:08
oui, un petit CI supplémentaire pour la porte NON
Il n'y a pas de contre-indication pour sa méthode, elle fonctionne.
Juste qu'il y aura toujours une tension aux bornes du moteur, alors qu'avec l'utilisation de la broche ENABLE,
si le moteur n'est pas piloté c'est comme si les fils étaient en l'air.
edit : petit correctif : il n'y a pas de tension entre les bornes du moteur quand il est à l'arrêt, mais elles peuvent être à GND ou VCC
#46
thermo_nono
-

- Membres
-
- 825 messages
Membre passionné
Posté 23 juillet 2018 - 11:23
un petit CI supplémentaire pour la porte NON
Il y a peut être moyen d'éviter l'ajout d'un CI pour la porte logique en utilisant juste deux transistors pour câbler un NON-logique.. sinon je risque de me retrouver avec un CI à 4 portes logiques pour en utiliser une seule...
#47
Forthman
-
- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 23 juillet 2018 - 12:46
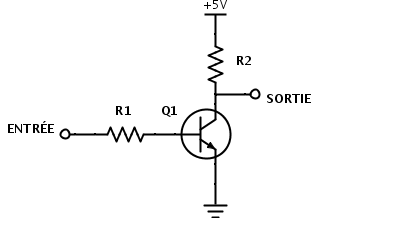
oui, un seul transistor plus 2 résistances et on a une petite porte NON
un 4000 a 14 pattes (4 NAND) donc c'est un peu gros, mais sinon on arrive à trouver du 40107 (double NAND) qui a 8 pattes
Ou alors on passe en CMS et là on trouve des simples NAND à 5 pattes
Image(s) jointe(s)
#48
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 23 juillet 2018 - 02:39
Oui, bien sûr avec un 7400 ou un transistor, on peur régler le problème, mais là, il voulait faire archi-simple.
Merci pour vos réponses.
Merci pour vos réponses.
Me dites pas que ignorez la réponse !Sinon, c'est quoi ce type d'instruction, "c = ;" ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#49
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
#50
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 23 juillet 2018 - 03:09
Oui, c'est bien parce qu'il a utilisé cette manière d'initialisation plusieurs fois que je m'interroge.Pour ton instruction le gars n'a tout simplement pas oublié un valeur après le = ??
Il a fait la même chose avec le int target = ; et le int prev_error = ;
Si il n'y a rien ça ne veut pas dire que c'est initialisé à 0 par défaut ??
Je ne pense pas que ce soit du C. Peut-être du C++.
Si c'est juste pour ne pas mettre de 0, je trouve ça nul ! Manque de lisibilité.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#53
Serveurperso
-

- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 18 août 2018 - 10:29
Le Coreless c'est vraiment le top sur un servomoteur le rotor léger diminue le moment d'inertie et un servo coreless c'est souvent plus de 100 euros et réservé aux hauts de gamme
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#54
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 18 août 2018 - 11:18
Veux tu dire que le Coreless est mieux que le Brushless ?Le Coreless c'est vraiment le top sur un servomoteur le rotor léger diminue le moment d'inertie et un servo coreless c'est souvent plus de 100 euros et réservé aux hauts de gamme
Pour les prix, plus haut sur ce fil, tu trouveras de très puissants et rapides servos Brushless pour environ 50€.
Par contre, si j'ai bien compris cette page, http://www.rfwireless-world.com/Terminology/I2C-vs-RS485.html, dommage que ce soit du RS485 au lieu du I2C.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#55
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 18 août 2018 - 11:42
C'est différent, le Coreless privilégie le faible moment d'inertie et donc l'agilité et le rendement lors des changements de vitesse de rotation. et le Brushless la durée de vie et le rendement à couple constant.
Par opposition aux moteurs Cored classiques qui utilisent des aimants ferrites et un rotor bobiné, les deux types de moteurs utilisent des aimants permanents au néodyme fer bore (NdFeB) ce qu augmente de beaucoup leurs rapports taille puissance.
Le Bruless privilégie la durée de vie car il n'a pas de collecteur à balais ou charbons, pas de pièce d'usure hormis les roulements et le reste de l'assemblage du servomoteur (comme le potentiomètre qui s'use, or qu'un encodeur optique ou HAL n'aura pas ce pb);
La commutation électronique du Brushless augmente aussi son rendement qui sera donc supérieur au Coreless HORMIS les démarrages et changement de vitesse ou il se fera "explosé" par le Coreless.
La partie mobile du Brushless (rotor) est forcément la partie magnétique, vu que la partie bobinée (électro-aimants) doit être statique (le stator) pour être pilotée par de l’électronique, il sera plus lourd au démarrage qu'un Coreless dont le rotor est une bobine seule tenue par sa méthode d'enroulement spéciale et de la résine.
Après la puissance du brushless pourrait compenser sa lourdeur pour une bonne agilité mais il consommera forcément plus qu'un coreless si les changements de consigne sont violents et répétés (hexapod...).
- Oliver17 aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#56
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
#57
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 18 août 2018 - 01:38
En résumé besoin de mouvement rapide tout en gardant une conso correcte = coreless
Besoin d'une grande durée de vie = brushless
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#58
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 18 août 2018 - 01:49
Vivement qu'ils inventent le CoreBrushless les deux en un. ^^
- Serveurperso aime ceci
#59
Serveurperso
-
- Membres
-
- 417 messages
Habitué
- Gender:Male
- Location:Paris
- Interests:Systèmes/Réseaux/Dev/Hardware/RF/Optique/Lasers...
Posté 18 août 2018 - 01:59
Justement c'est ce que j'ai mis dans mon pavé qui explique que c'est impossible, comment tu veux faire tourner un rotor bobiné sans noyau et sans collecteur avec un stator bobiné et piloté électroniquement ? mdrlolxd
- Forthman aime ceci
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
#60
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 18 août 2018 - 02:05
Oui ça j'avais bien compris, mais déjà faire un moteur qui exécute des mouvements rapides avec peu de conso ayant une longue durée de vie.
@Oracid : J'ai regardé le lien que tu donnes rapidement, tu crois que c'est si perturbant que ça d'être en RS485 au lieu du I2C. ??
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

