

Tu aimerais des détails sur quelle partie du code? Gestion moteurs? Bluetooth? Cinématique inverse?

125 réponses à ce sujet
#82

Vinchator
-
- Membres
-

- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 09 décembre 2019 - 09:23
Tu aimerais des détails sur quelle partie du code? Gestion moteurs? Bluetooth? Cinématique inverse?
L'application mobile via bluetooth m'attire beaucoup mais je voudrais pas griller les étapes... Pour la cinématique inverse je ne pense vraiment pas avoir le niveau je pense deja le contrôler un mouvement apres l'autre...
L'appli fonctionne avec la cinématique inverse ??
#83
Donovandu88
-

- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 10 décembre 2019 - 08:34
Non pas de cinématique inverse avec l'application pour le moment.
L'application me permet seulement de manipuler le robot axe par axe et également de lui apprendre des mouvements qui seront enregistrés et et répétés
L'application me permet seulement de manipuler le robot axe par axe et également de lui apprendre des mouvements qui seront enregistrés et et répétés
#84
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 11 décembre 2019 - 08:22
Non pas de cinématique inverse avec l'application pour le moment.
L'application me permet seulement de manipuler le robot axe par axe et également de lui apprendre des mouvements qui seront enregistrés et et répétés
Du coup ca serait plus avec l'application que j'aimerai le piloter...
C'est fait avec MIT app inventor ?
#88
Phil2P
-

- Membres
- 44 messages
Nouveau membre
- Gender:Male
- Interests:Robotic arm, 3D printer, design
Posté 12 décembre 2019 - 10:45
Bonjour,
J'ai imprimé toute les pièces du bras Moveo de BCN3D et je les ai assemblées.
Jusque là pas de problème...
J'ai acheté les moteurs pas-à-pas qui mettent en mouvement les articulations, le servomoteur pour la pince, une carte Ramps 1.6, des drivers Tb6560 et une carte arduino Mega.
Jusque là ça va...
Avec de l'aide, j'ai effectué le branchement électrique d'un moteur pas-à-pas et d'un servo moteur sur le driver , la carte Ramps 1.6 et l'Arduino.
J'ai lu sur ce forum des messages concernant une library AccelStepper, un firmware Marlin, mais je ne sais pas ce qu'il faut utiliser.
Dans un premier temps, je voudrais juste mettre en mouvement (rotation de 30 degrés par exemple) un moteur pas-à-pas et d'un servo moteur (ouverture et fermeture de la pince).
Je pense qu'ensuite, je pourrai faire de même avec les 4 autres stepper.
Pouvez-vous m'aider en me guidant ?
Philippe
#89
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 12 décembre 2019 - 11:02
BonjourBonjour,
J'ai imprimé toute les pièces du bras Moveo de BCN3D et je les ai assemblées.
Jusque là pas de problème...
J'ai acheté les moteurs pas-à-pas qui mettent en mouvement les articulations, le servomoteur pour la pince, une carte Ramps 1.6, des drivers Tb6560 et une carte arduino Mega.
Jusque là ça va...
Avec de l'aide, j'ai effectué le branchement électrique d'un moteur pas-à-pas et d'un servo moteur sur le driver , la carte Ramps 1.6 et l'Arduino.
J'ai lu sur ce forum des messages concernant une library AccelStepper, un firmware Marlin, mais je ne sais pas ce qu'il faut utiliser.
Dans un premier temps, je voudrais juste mettre en mouvement (rotation de 30 degrés par exemple) un moteur pas-à-pas et d'un servo moteur (ouverture et fermeture de la pince).
Je pense qu'ensuite, je pourrai faire de même avec les 4 autres stepper.
Pouvez-vous m'aider en me guidant ?
Philippe
Cool un Moveo de plus !
Il faudrait que tu ouvres un sujet et que tu le présente ça serait chouette.
Moi je n'ai pas utilisé de ramp je suis sur les drivers directement avec l'arduino.
Pour ce qui est de Marlin j'ai cru comprendre que c'était bien pour tester mais pas terrible pour utiliser au final mais j'en suis pas sur je ne l'ai pas essayé.
Je ne suis pas beaucoup plus avancé que toi pour le code mais oui je pense que Accelstepper est une bonne solution d'ailleur Donovan a utilisé cette librairie et les mouvements du sien sont bien fluides ( il a le sien sur un autre sujet sur le forum ).
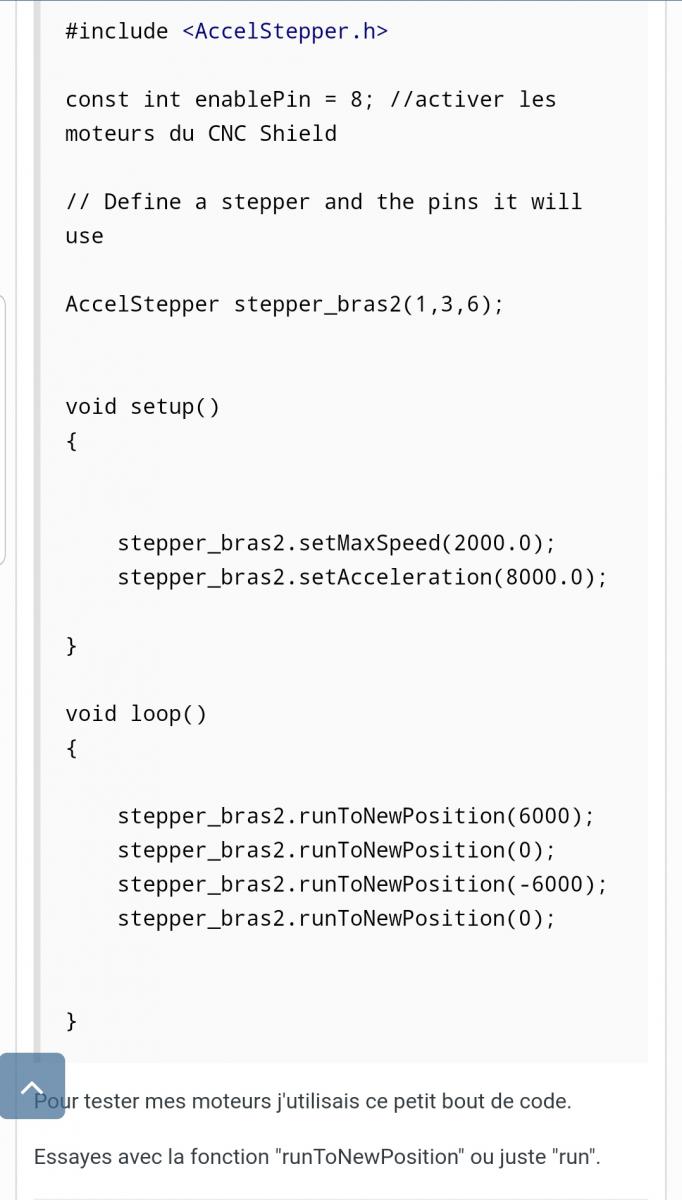
Il ma également partagé un petit bout de code pour tester les moteurs avec cette librairie je te le partagerai
Pour le servo il existe des tester dédié sinon sur le net on trouve plein d'exemple assez simple
#90
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
#91
Phil2P
-
- Membres
- 44 messages
Nouveau membre
- Gender:Male
- Interests:Robotic arm, 3D printer, design
Posté 12 décembre 2019 - 11:38
Voila le bout de code en question pour tester...
Ca a bien fonctionné pour moi et ca ma permis de me rendre compte que mes drivers étaient sous dimensionnés
Merci beaucoup pour le bout de code.
Je n'ai pas trop l'habitude des forums. Je vais me présenter et ouvrir une nouvelle discussion.
A bientôt
Philippe
- Mike118 aime ceci
#92
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 12 décembre 2019 - 11:41
Merci beaucoup pour le bout de code.
Je n'ai pas trop l'habitude des forums. Je vais me présenter et ouvrir une nouvelle discussion.
A bientôt
Philippe
Super dis moi quand tu as ouvert ton sujet comme ca on pourras s'entraider ces temps je lis pas mal de documentation sur Accelstepper mais c'est pas évident... A bientôt
#93
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 13 décembre 2019 - 01:29
Oui, j'utilise dans ce robot, 4 librairies :
AccelStepper
LiquidCrystal
Servo
FastLED
Je viens de lire ton sujet sur la communication entre arduino et MIT app inventor...
Ca t'embête pas si je pompe un peu ton travail pour mon bras ??
#94
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 13 décembre 2019 - 06:12
Je viens de lire ton sujet sur la communication entre arduino et MIT app inventor...
Ca t'embête pas si je pompe un peu ton travail pour mon bras ??
Non vas y, mais il va falloir adapter en fonction des composants que tu utilises.
#95
Phil2P
-
- Membres
- 44 messages
Nouveau membre
- Gender:Male
- Interests:Robotic arm, 3D printer, design
Posté 13 décembre 2019 - 11:17
Bonjour,
Si j'ai bien compris, AccelStepper sert à commander un ou des moteurs pas-à-pas.
Question de néophyte :
Ça sert à quoi les librairies :
- LiquidCrystal,
- Servo,
- FastLED ?
Philippe
#97
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 13 décembre 2019 - 05:15
Merci je vais m'y mettre ce soir je me suis déjà gavé de vidéos tuto pour les bases...Non vas y, mais il va falloir adapter en fonction des composants que tu utilises.
Pourquoi il y a une horloge sur ton appli ? Elle est necessaire au bluetooth ou alors c'est pour un écran d'accueil ?
Tu me conseil de télécharger les apk direct pour tester ou d'utiliser l'émulateur ?
Il me faut un hc-05 vu que l'arduino renvoie des info à l'appli un hc-06 ne convient que en esclave ?
#98
Phil2P
-
- Membres
- 44 messages
Nouveau membre
- Gender:Male
- Interests:Robotic arm, 3D printer, design
Posté 13 décembre 2019 - 05:23
LiquidCrystal c'est pour gérer un écran
Servo, pour gérer les servos
FastLed pour gérer des leds RGB
Merci pour l'info !!!
D'après ce que j'ai lu sur ce forum, tu as réussi à commander les moteurs pour obtenir un déplacement imposé au niveau de la pince.
Est-ce que tu peux programmer un déplacement de la pince de 100 mm sur les X, par exemple, mais sans "apprentissage" ?
Philippe
#99
Donovandu88
-
- Membres
-
- 680 messages
Membre passionné
- Gender:Male
Posté 13 décembre 2019 - 06:53
Merci je vais m'y mettre ce soir je me suis déjà gavé de vidéos tuto pour les bases...
Pourquoi il y a une horloge sur ton appli ? Elle est necessaire au bluetooth ou alors c'est pour un écran d'accueil ?
Tu me conseil de télécharger les apk direct pour tester ou d'utiliser l'émulateur ?
Il me faut un hc-05 vu que l'arduino renvoie des info à l'appli un hc-06 ne convient que en esclave ?
L'horloge dans l'application sert à faire communiquer le téléphone et le robot tous les certains nombres de secondes.
Vaut mieux utiliser l'émulateur comme ça les modifications apparaîtrons en temps réel.
C'est mieux d'avoir un module bluetooth qui fonctionne dans les deux sens.
Merci pour l'info !!!
D'après ce que j'ai lu sur ce forum, tu as réussi à commander les moteurs pour obtenir un déplacement imposé au niveau de la pince.
Est-ce que tu peux programmer un déplacement de la pince de 100 mm sur les X, par exemple, mais sans "apprentissage" ?
Philippe
Qu'entends-tu par "sans apprentissage"?
#100
Vinchator
-
- Membres
-
- 210 messages
Membre occasionnel
- Gender:Male
- Location:Swiss
- Interests:Bidouillage
Posté 14 décembre 2019 - 02:01
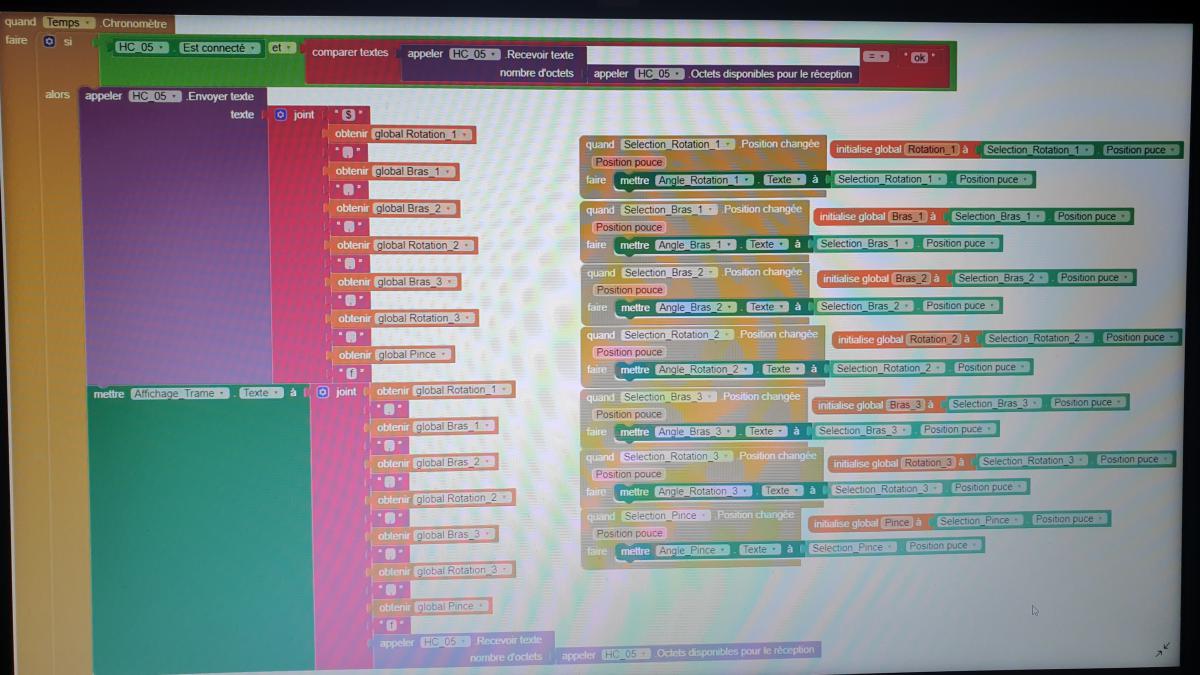
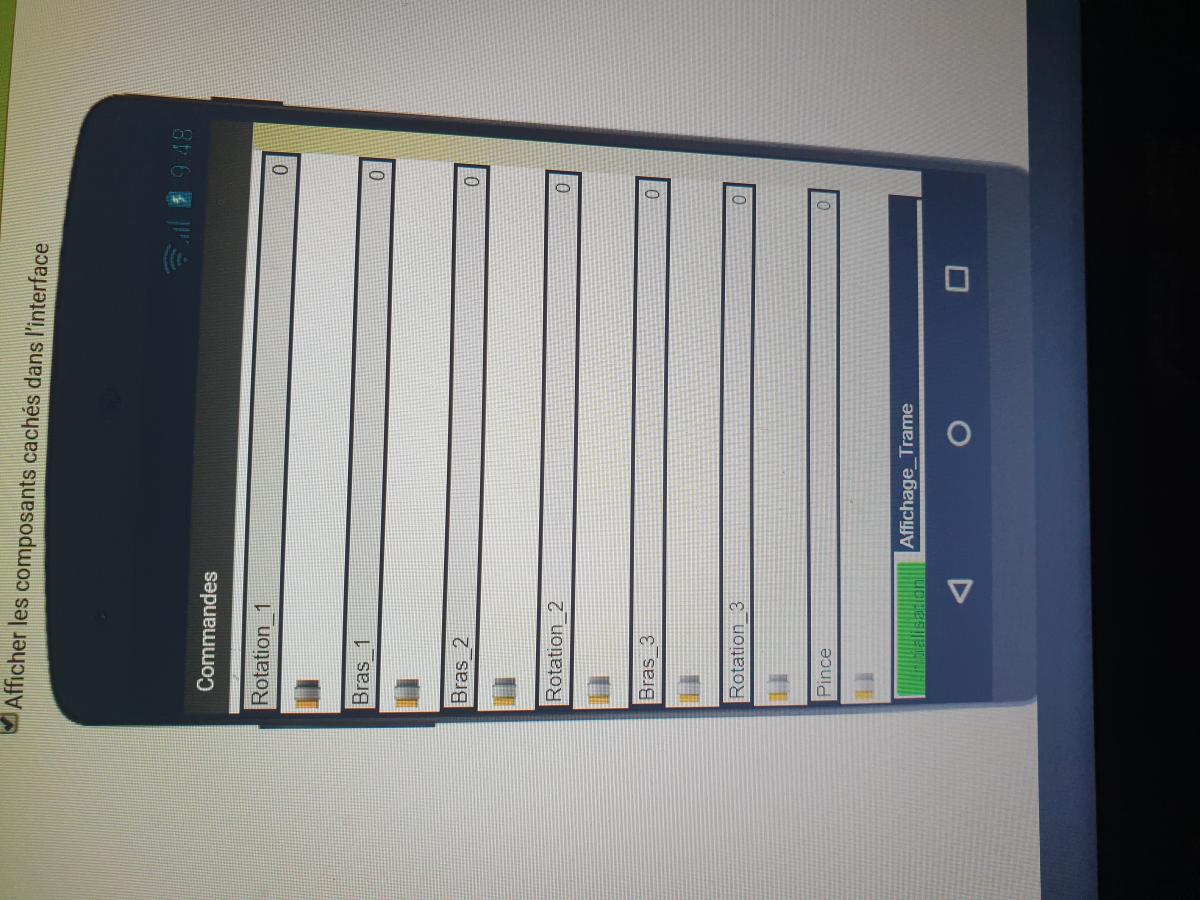
J'ai commencé l'appli je voudrais pouvoir enregistrer différentes coordonnées avec l'aide des slider pour créer des séquences et choisir le nombre de fois ou jouer la séquenceNon vas y, mais il va falloir adapter en fonction des composants que tu utilises.
Tu peux me donner des pistes stp ?
Il faut stocker les differentes coordonnées mais comment faire au niveau des trames ?
Image(s) jointe(s)
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




