


Notice permettant d'assembler la tourelle pan tilt du Robot Minus
Présenté par : Vigibot & Robot Maker

1 : Matériel
Contenu du kit :
Servomoteur 180° : 1
Servomoteur 270° : 1
Camera Raspberry pi : 1
Nappe pour camera : 1
Kit mecanique Pan tilt Minus : 1
Le kit mécanique pan tilt inclu :
- Vis M2 longueur 5 à 6mm : 1
- Vis M2 longueur 8mm : 2
- Vis M2 longueur 14mm : 2
- Vis M2 longueur 20mm : 4
- Ecrous M2 : 10
- Vis M2.5 Nylon longueur 10mm : 2
- Ecrou M2.5 Nylon : 2
- Pièce imprimées en 3D : 4

2 : Montage
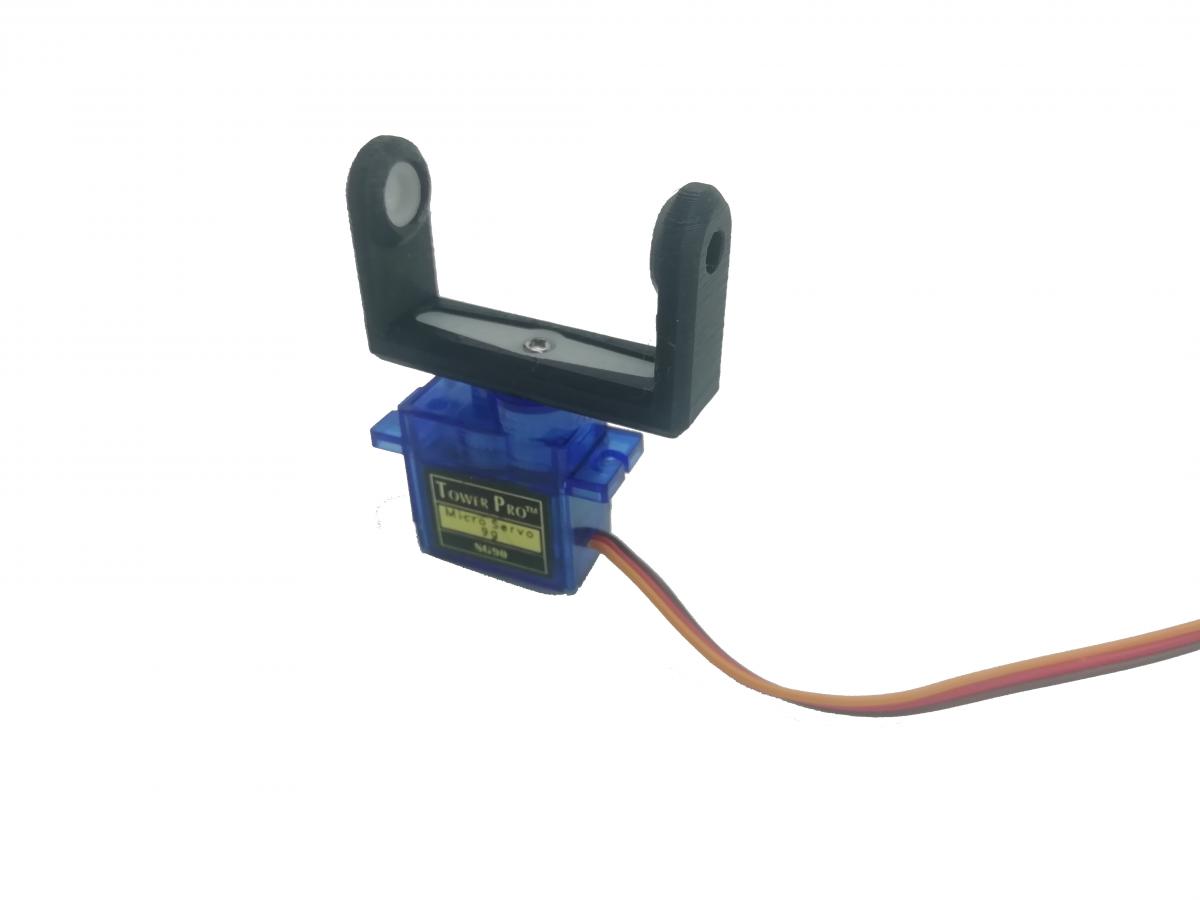
Insertion des palonniers dans le u:

le servo 180° s'insère dans la pièce " tête " et on le vis avec les 2 vis M2 14mm

le servo 270° se fixe sur le U avec la vis 5mm
Assemblage de la caméra avec les 4 vis M2 longueur 20mm et 4 écrous:

Attention à ne pas toucher l'objectif de la camera avec vos doigts pour éviter de laisser des traces 
Assemblage des différents morceaux

Pour cette étape il vaut mieux le faire avec les servomoteurs reliés à la raspberry pi connecté à vigibot. Cela permettra d'ajuster la position des palonnier en fonction du besoin. Par défaut les GPIO à utiliser sont les gpio 5 pour le mouvement "Pan" (= droite gauche de la tête ) et le gpio 6 pour le mouvement "Tilt " ( mouvement haut bas )
Une fois pleinement satisfait de l'amplitude des mouvement sur les deux axes, il ne vous restera plus qu'à fixer les servo 270°, sur le support avec les 2 vis 8mm et mettre si vous le souhaitez le cache de protection sur votre camera.










![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





