Bonjour à tous,
un besoin exprimé par un membre de ma famille, vieillissant (70 ans passés), marchant avec difficultés mais habitant au bout d'une impasse privée.
L'impasse fait 100m, elle est droite mais n'est pas bitumée, le sol est celui d'un chemin de terre, avec des trous (plus large quee profond) et des cailloux de la taille d'une noix au maximum, voie urbaine typique pour un vélo tout chemin.
Donc l'idée au brouillon est celle-ci:
Un robot téléguidé (radiocommande) qui tire une poubelle qui peut avoisiner les 100 Kgs (charge utile), sur un chemin de terre et sur une distance de 500 m.
Donc début classique, une structure pour 2 roues motorisées, et une roue libre.
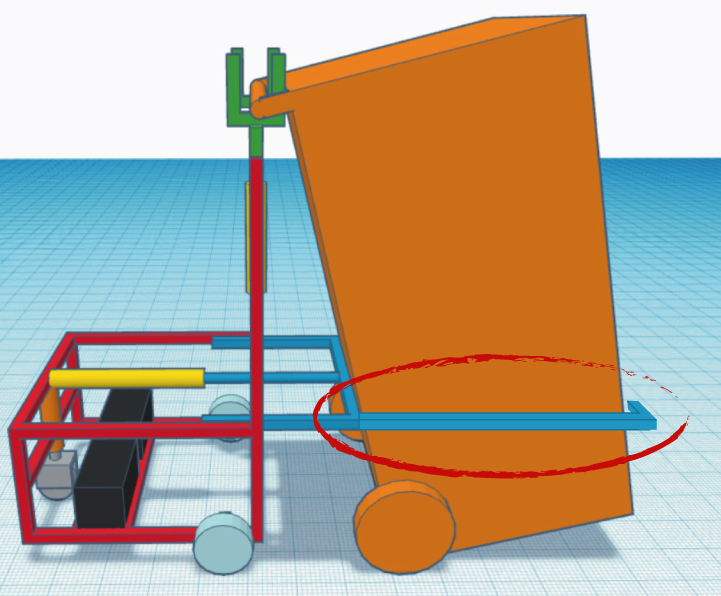
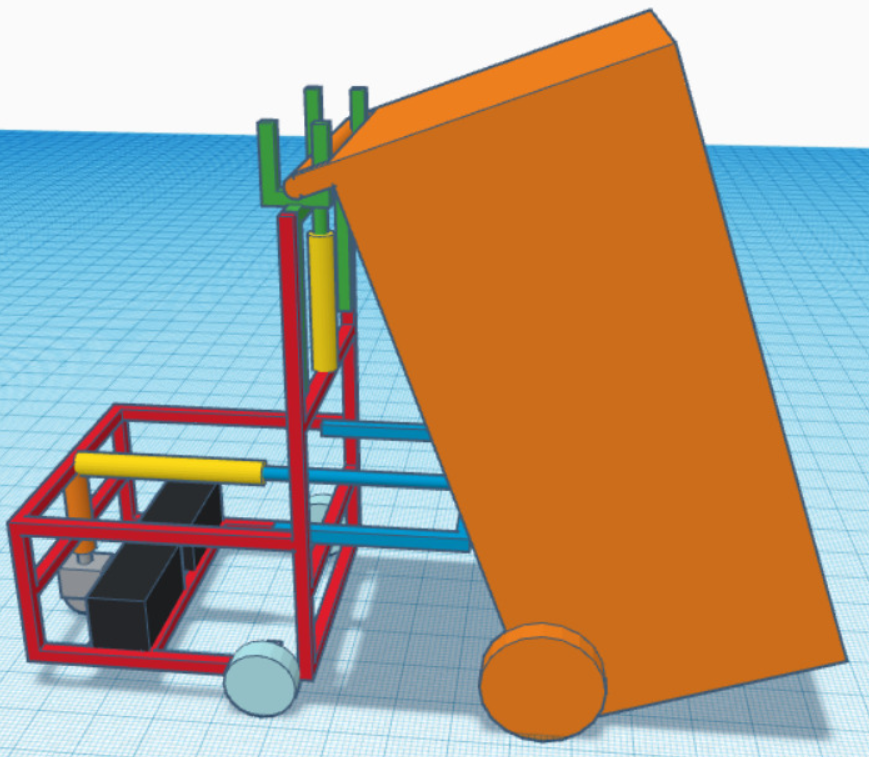
J'ai pensé à 2 verins pour l'usage "métier". Le premier (en vert sur l'image ci-dessus) pour attraper la poubelle par les poignées et potentiellement verrouiller le maintien.
Le second (en bleu sur l'image ci-dessus) pour faire basculer la poubelle et déplacer son centre de gravité entre ses roues et celles du robot, afin que son poids participe à l'accroche des roues motorisées sur le sol.
Le tout alimentée par une batterie 24v pour donner assez de puissance aux motors.
Pas de challenge technique, juste faire un truc qui serve, s'inspirer du design thinking pour faire ce projet en s'appuyant sur le retour d'expérience utilisateur.
Je vais le faire Create Commons pour permettre de se le faire soi-même, si jamais d'autres retex peuvent alimenter le débat.
Prochaines étapes:
définir les spécifications techniques de la structure (conception, fabrication, montage), du matériel actif (roues, moteurs, vérins), du matériel electro (controleurs, cpu, transmission).
@+