
63 pièces?!? Comment est-ce que tu arrives à autant de pièces pour ce robot?

77 réponses à ce sujet
#21

Sandro
-

- Modérateur
-

- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 17 novembre 2020 - 10:39
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#22
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 17 novembre 2020 - 01:01
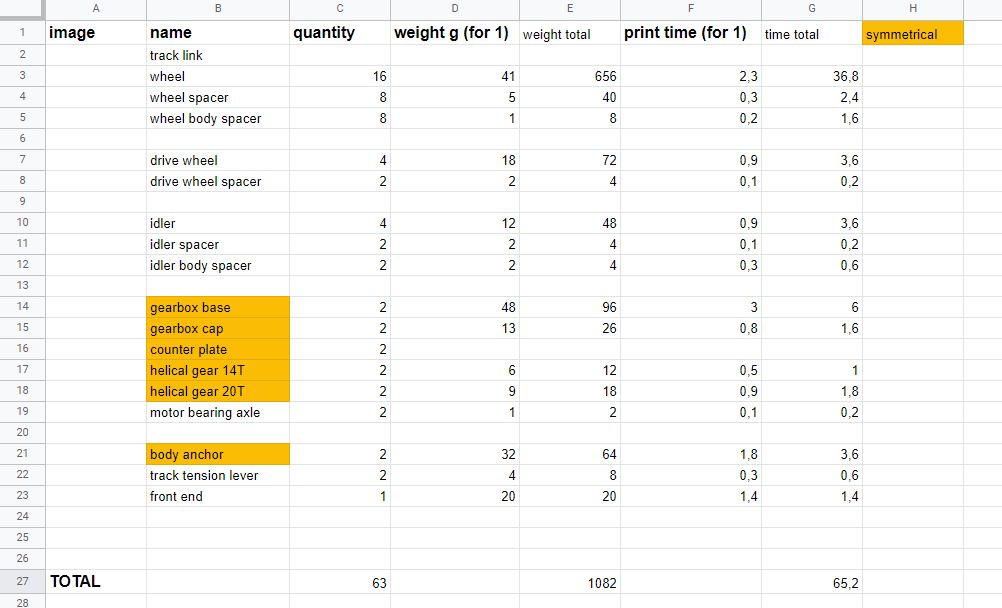
Chaque roue est faite de 4 pièces, 4 roues de chaque coté et double ça vu que y'a 2 cotés et ça fait deja 32 pièces juste pour ça.
Voila le tableau complet (pour le moment, j'ai certaines pieces a changer)
Image(s) jointe(s)
#23
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 20 novembre 2020 - 04:51
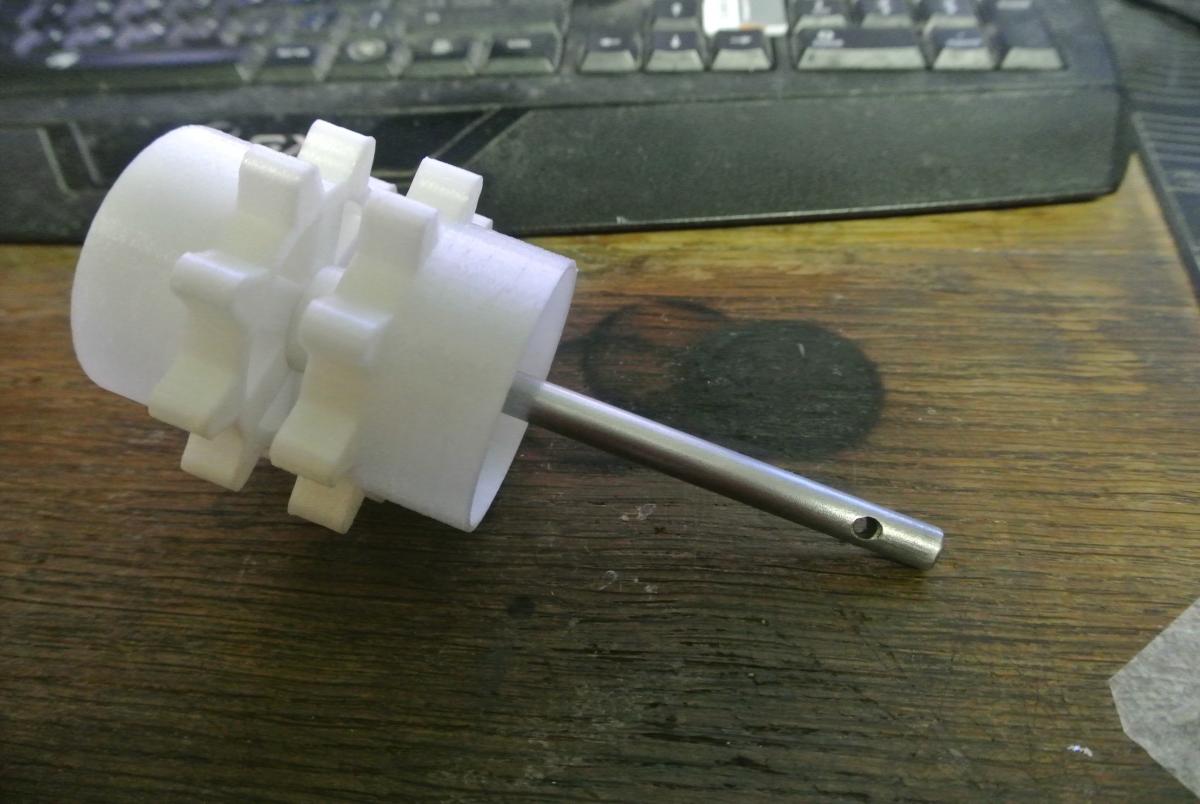
J'ai commandé du plastique donc en attendant que ça arrive j'ai fait un des axes de transmission pour voire ce que ça donne.
A l'origine sur mon AMX-13 j'avais des axes en tube de fibre de carbone mais ils etaient pas mal fragile, je suis surpris de pas avoir eu de probleme avec a la maker faire et par la suite je les ai remplacés par des axes en acier et j'ai eu aucun probleme avec donc normalement ça devrais tenir le coup.
Image(s) jointe(s)

#24
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 23 novembre 2020 - 07:05
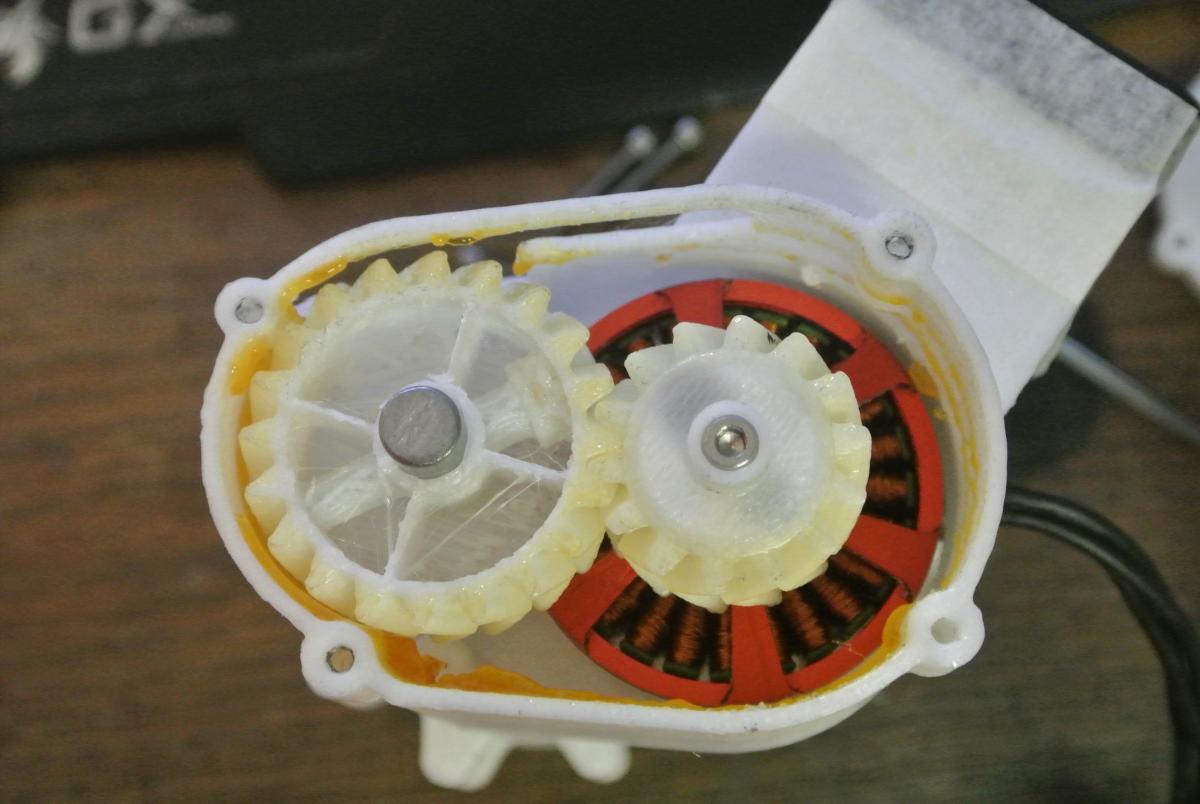
J'ai reçu le plastique et j'ai commencé a imprimer les bouts du groupe de propulsion, en commencant par la roue d'entrainement.
Apres seulement une revision ça fonctionne bien, maintenant je vais imprimer le reducteur et essayer de le faire fonctionner.
Image(s) jointe(s)

#25
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
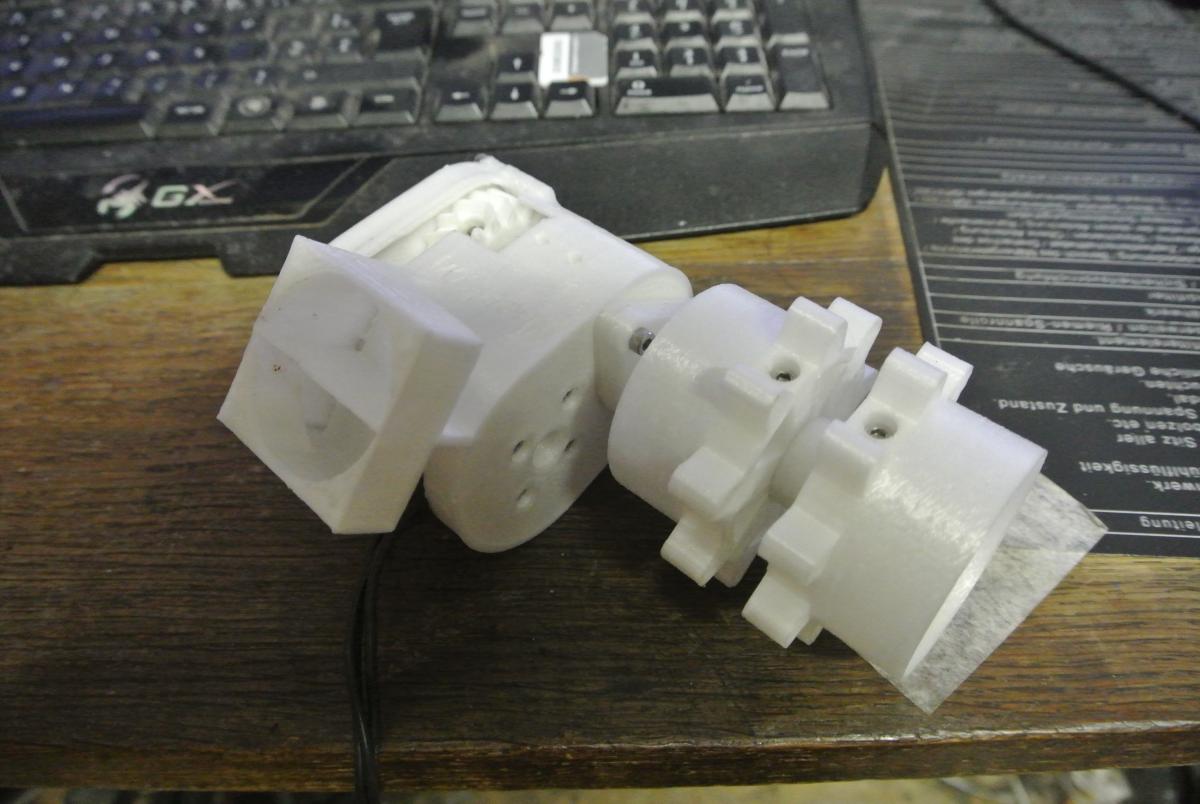
Posté 24 novembre 2020 - 01:51
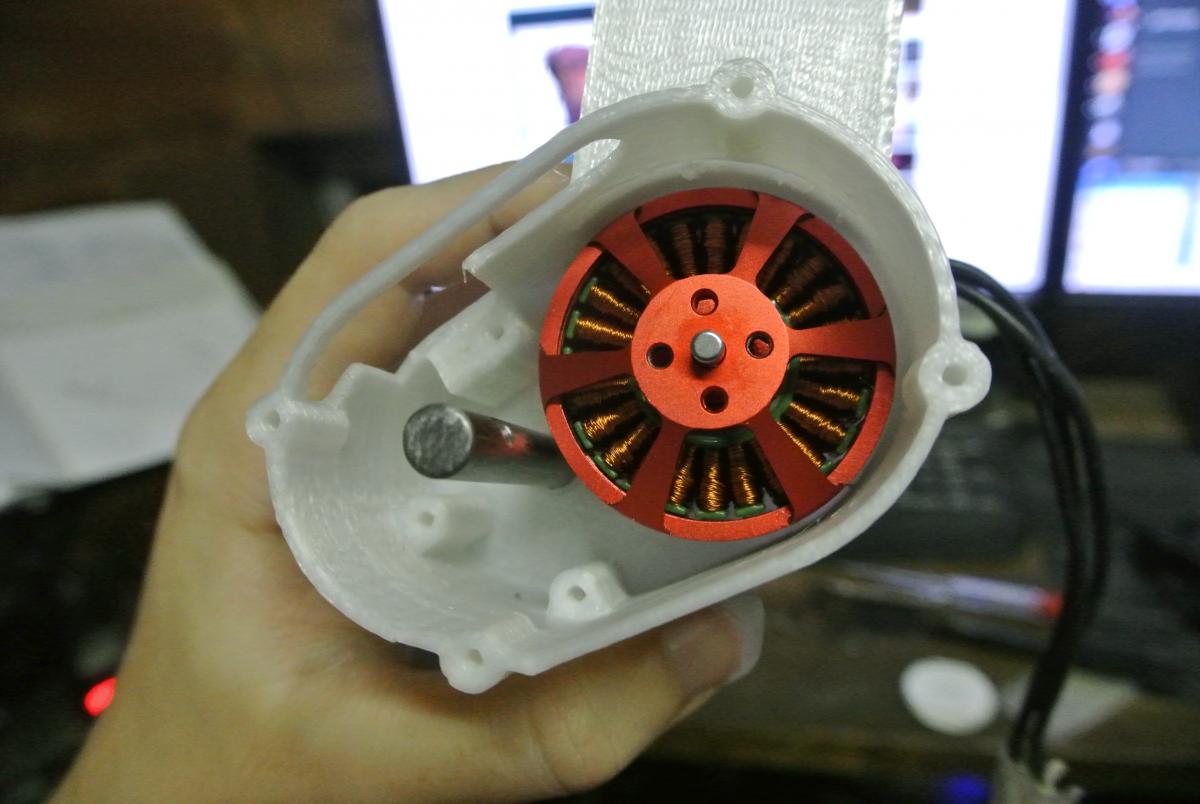
Un réducteur complet assemblé, je sais que le son est un peu terrible mais en vrai il tourne de façon assez fluide une fois un peu rodé.
C'est deja bien mieux que les vieux réducteurs de l'AMX.
Par contre c'est a peu pret tout ce que je pouvais tester de façon indépendante donc je vais devoir attendre d'avoir la caisse pour continuer.
Image(s) jointe(s)
#26
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 24 novembre 2020 - 02:13
Tu avances vite. Bravo !
Tes pignons, c'est du PLA ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos



#29
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 01 décembre 2020 - 05:27
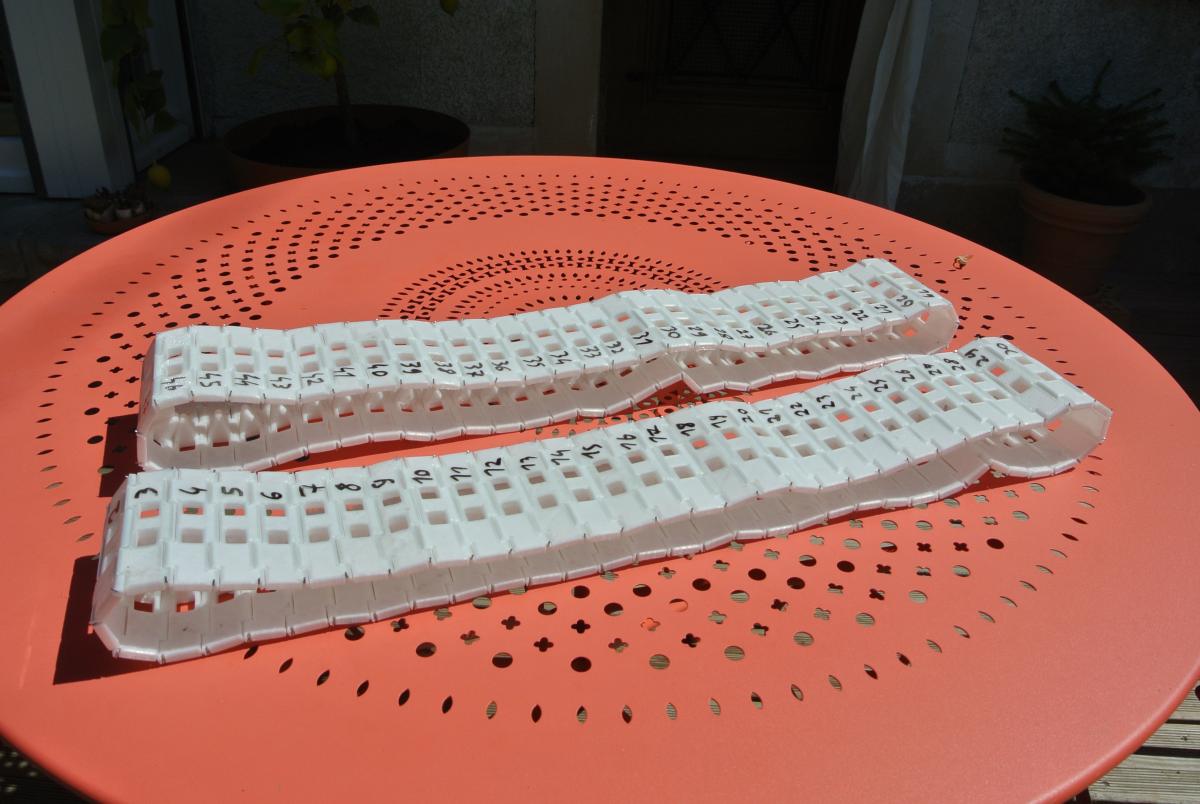
Vu que la TRR est censée se passer sur une piste en bois dur et lisse selon les gens a qui j'ai parlé, j'ai pensé a ajouter des patins sur les chenilles du tank pour augmenter le grip.
Il se trouve que des chenilles en plastique lisse on tres peu de friction sur un sol lisse et dur, ceux qui ont vu mon tank faire du drift à la maker faire sont au courant.
Donc pour augmenter le grip des chenilles histoire de pouvoir accelerer et ralentir de façon plus aggressive, j'ai pensé a un tas de méthodes mais au final et comme toujours la solution la plus simple est probablement la meilleure.
J'ai juste mis deux lignes de colle chaude sur chaque maillon.
Le grip est bien meilleur comme ça, j'espere juste que ça demanderas pas trop d'effort aux moteurs pour faire tourner le robot.
Image(s) jointe(s)


#30
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 décembre 2020 - 06:08
J'ai déjà fait ça. Au bout d'un moment, avec les frottements, la colle va être aussi lisse que les patins.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#32
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 décembre 2020 - 07:18
A mon avis, avec une surface de contact moindre, le char va glisser encore plus.
De toute façon, ce n'est pas très grave de glisser un peu. La surface de contacte des chenilles étant importante, tu ne vas pas glisser beaucoup.
Il faut tester.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#34
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
#35
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 18 mai 2021 - 03:19
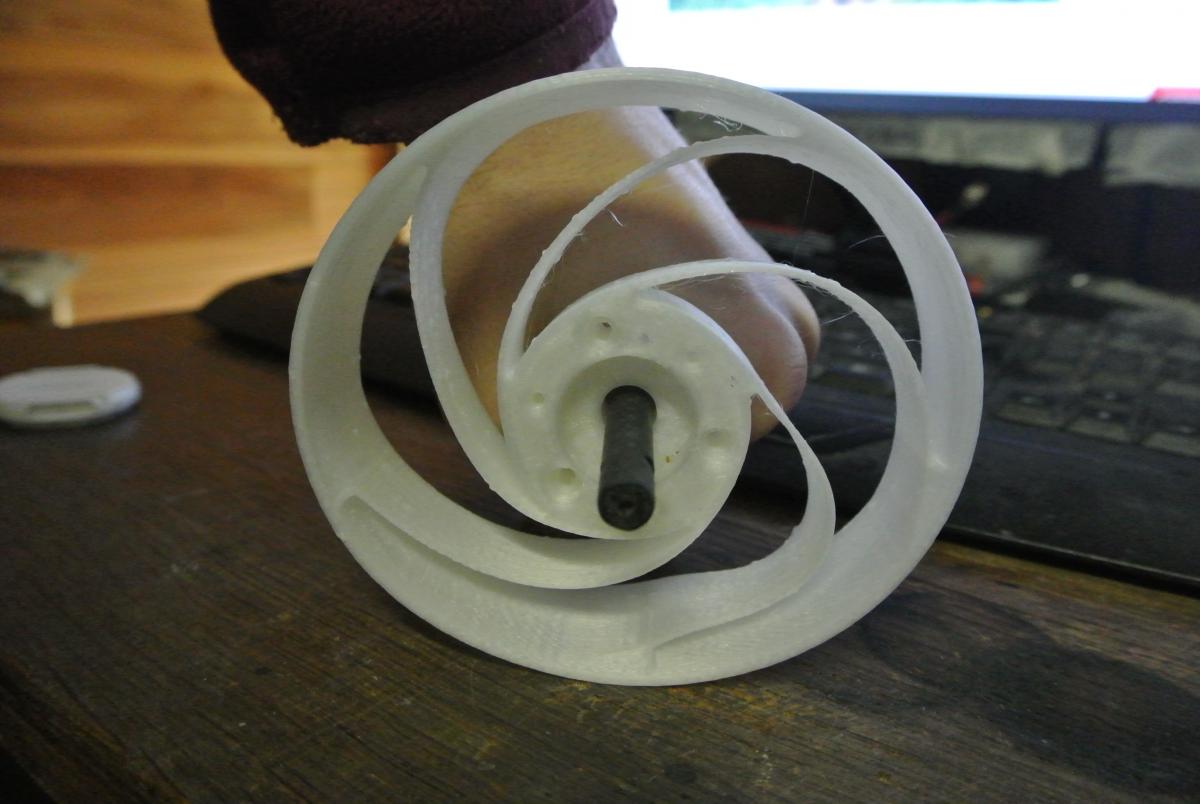
J'ai imprimé une roue de test avec seulement 5 rayons histoire d'etre plus flexible et de mieux absorber les chocs, avec 1kg de pression elle se deforme de moins de 5mm et si le robot fait 3kg chaque roue devra supporter seulement 187g donc rien de bien mechant.
Image(s) jointe(s)

#36
zavatha
-

- Membres
-
- 233 messages
Membre occasionnel
- Gender:Male
Posté 18 mai 2021 - 08:57
Salut,
Définitivement, ce design de roue est hyper bien pensé 👌
++
Zav
Définitivement, ce design de roue est hyper bien pensé 👌
++
Zav
#37
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 11 juin 2021 - 07:47
Le principal des roues est imprimé, maintenant il reste les tensionneurs a l'avant et leur montures et toute l'impression 3d (et tout le systeme de chenilles) sera fini.
J'ai aussi acheté plus de tiges en acier pour les axes, apres il me manquera que la caisse.
Image(s) jointe(s)




#39
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 07 décembre 2021 - 05:25
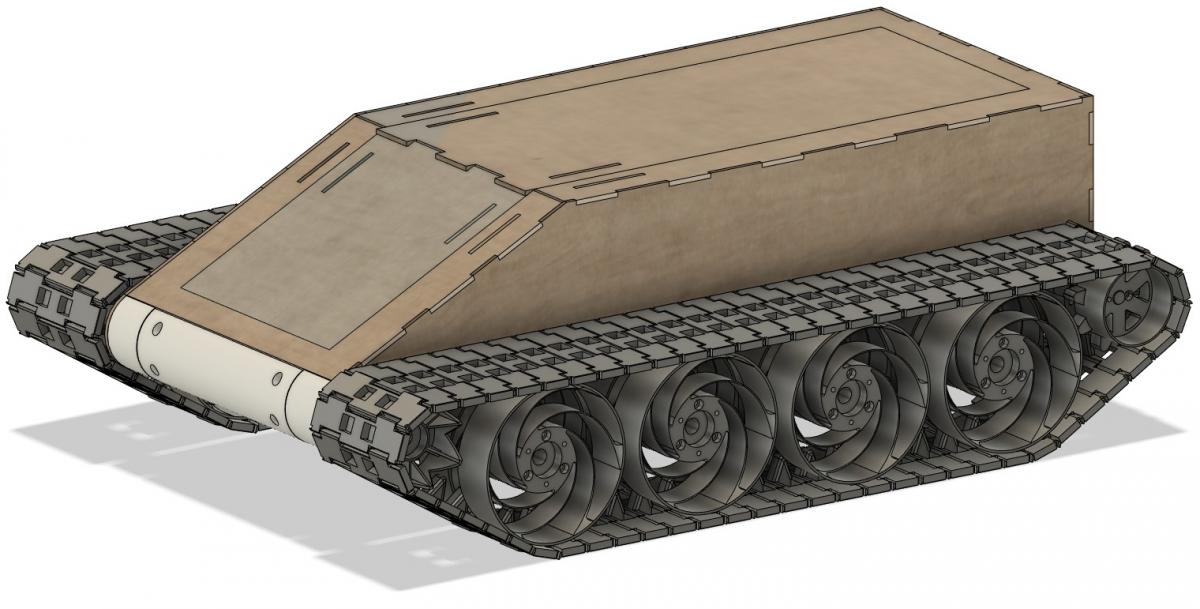
Les potes du fablab ont enfin pu couper la caisse du robot donc je devrais tout reçevoir dans les semaines a venir, j'ai deja tout le hardware donc il me reste juste a couper les axes et imprimer l'avant du robot.
Pour le moment il va tourner avec un controlleur de vol de modelisme avec inav sur le mode tank, je vais aussi lui mettre le gps et la video FPV histoire de conduire avec pour le fun, collecter des données de vitesse et consomation éléctrique et peut etre tenter des missions GPS.
Image(s) jointe(s)

#40
Fluburtur
-
- Membres
- 48 messages
Nouveau membre
- Gender:Male
- Location:Fontainebleau
Posté 13 janvier 2022 - 03:08
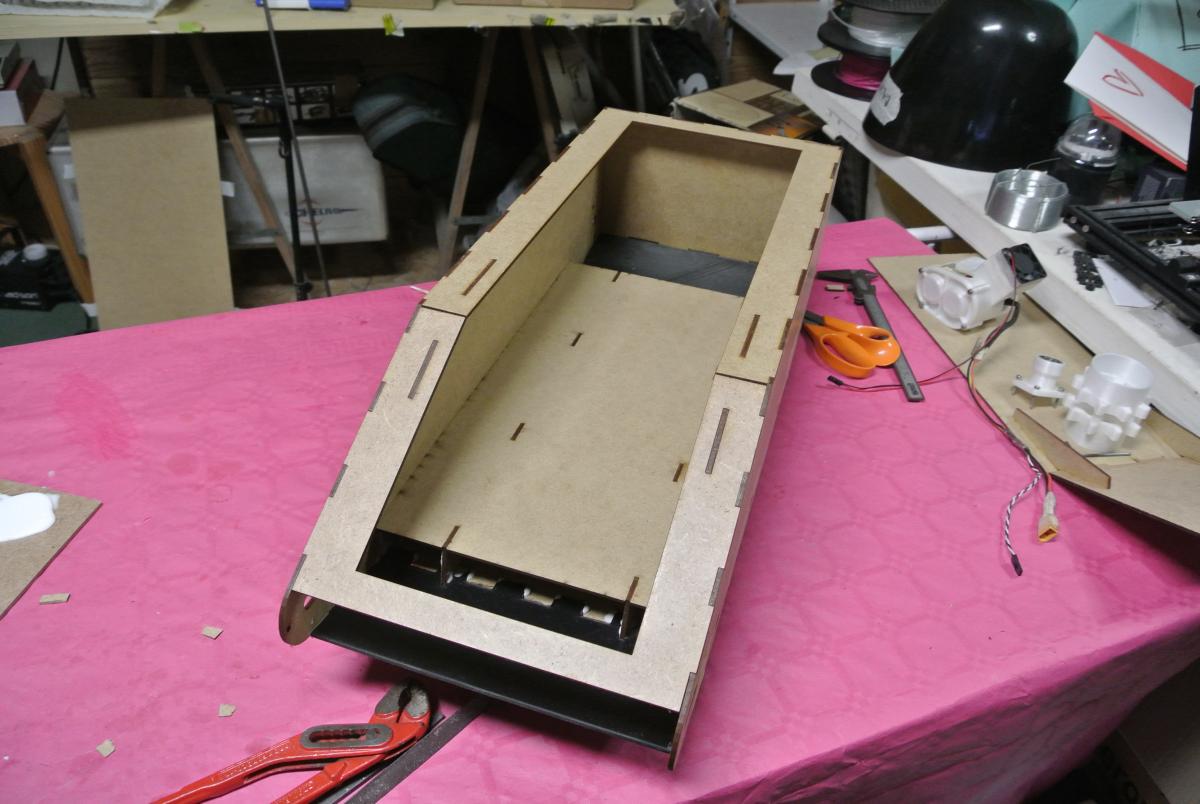
Les pieces sont enfin arrivées a la maison et j'ai deja presque fini d'assembler la caisse.
Pour le moment la caisse seule pese 1.16kg, j'avais estimé le poids total du robot a 3kg donc en vrai on devrais pas en etre loin.
Je suis en train d'imprimer quelque pieces qui vont a l'avant, ensuite faut que je prepare tout les axes et que je monte l'electronique et il sera pret a rouler!
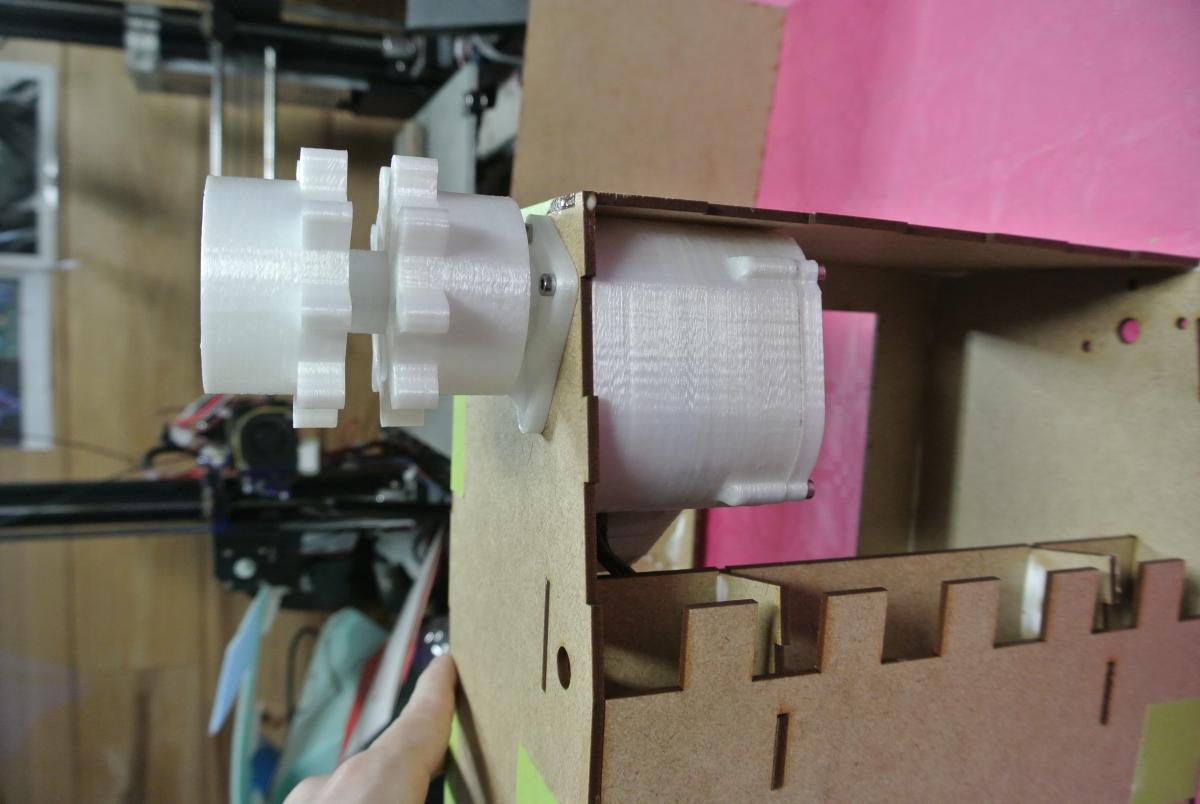
J'ai aussi monté un reducteur pour voir ce que ça donne et c'est pas trop mal.
Image(s) jointe(s)
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




