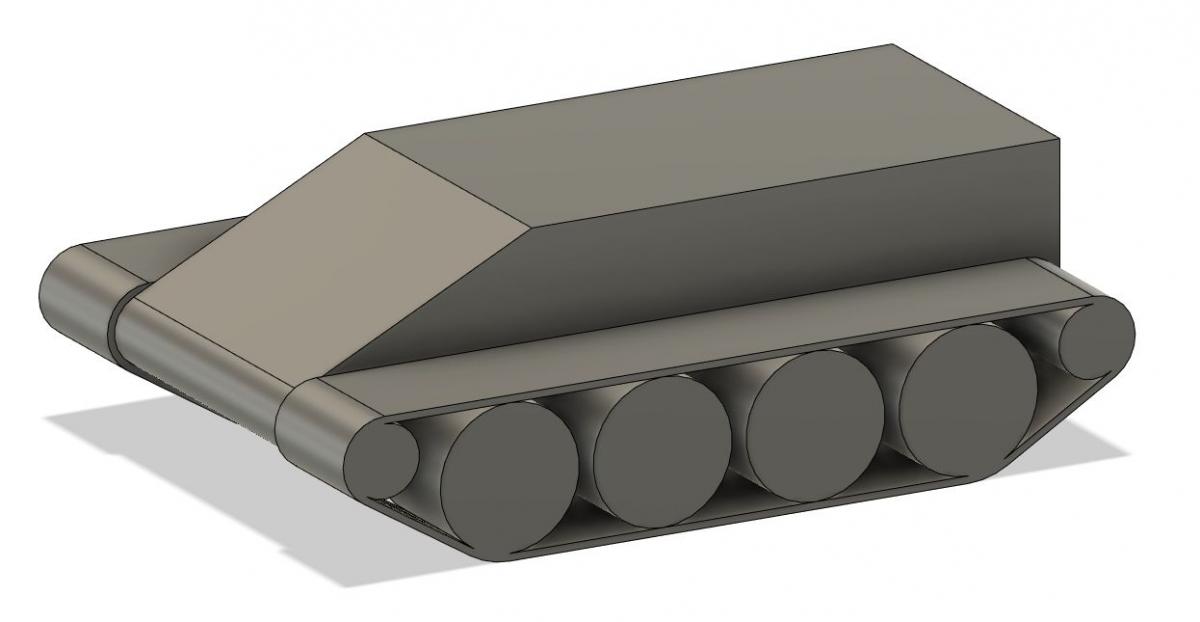
Pour eventuellement participer a la Toulouse robot race (et aussi pour le fun) j'ai commencé a fabriquer un nouveau robot à chenilles qui s'appelle Wheelson, en référence a Wilson de Wintergatan.
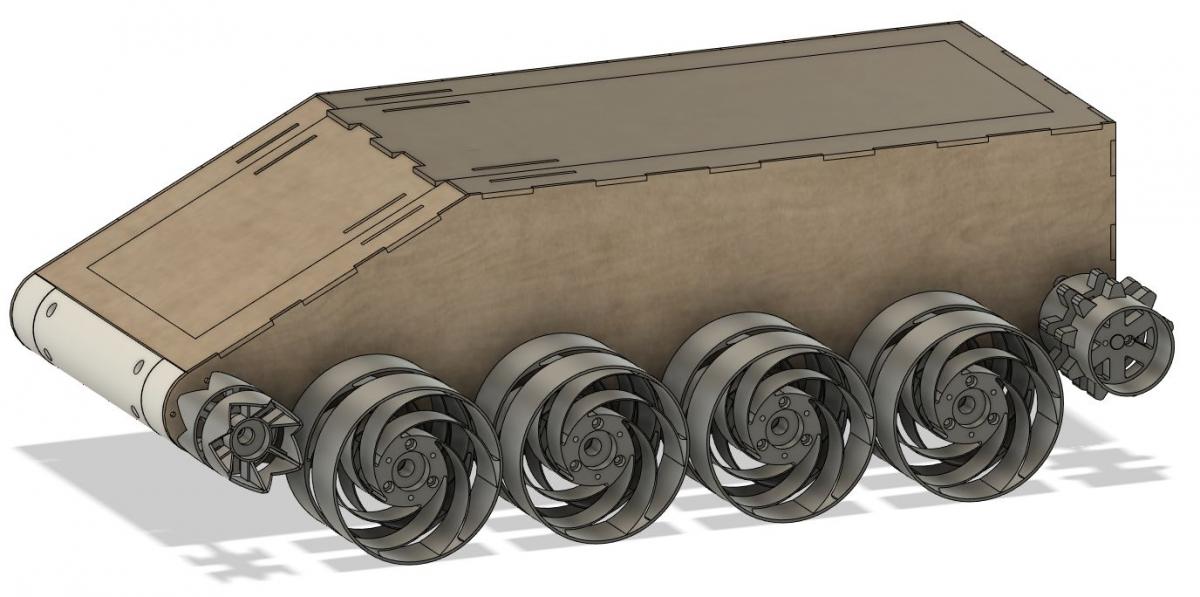
Il fera environt 40cm de large et 56 de long et j'estime le poids final aux alentours de 3KG.
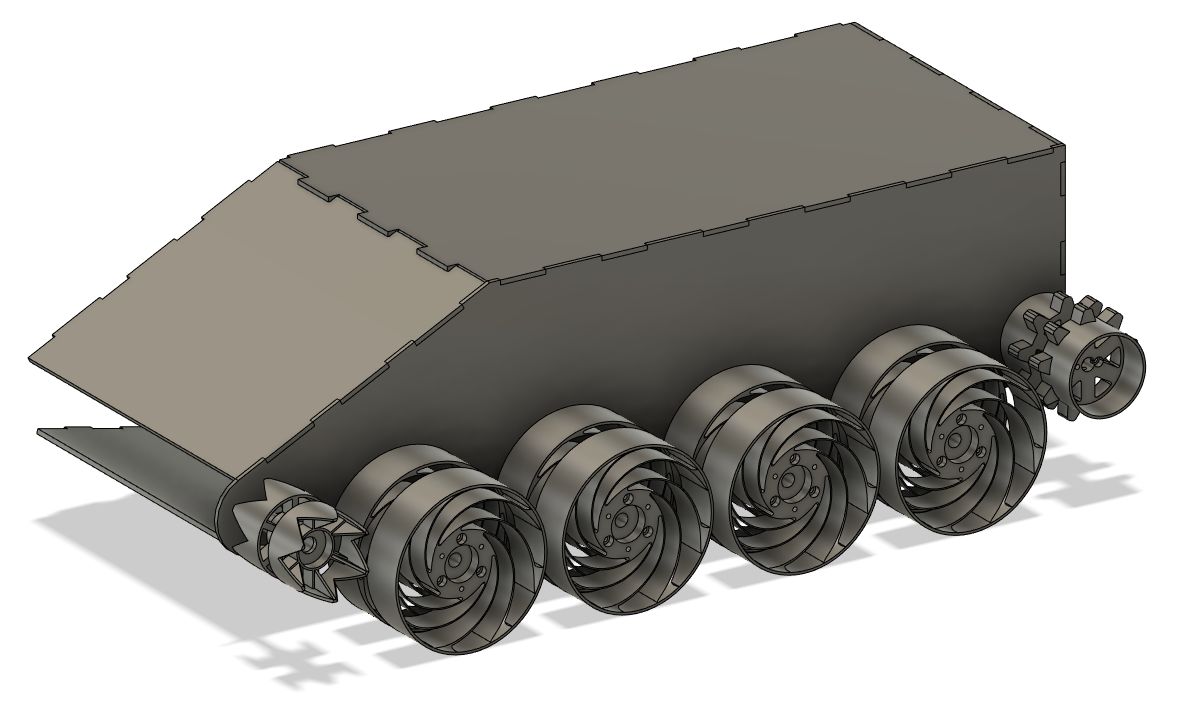
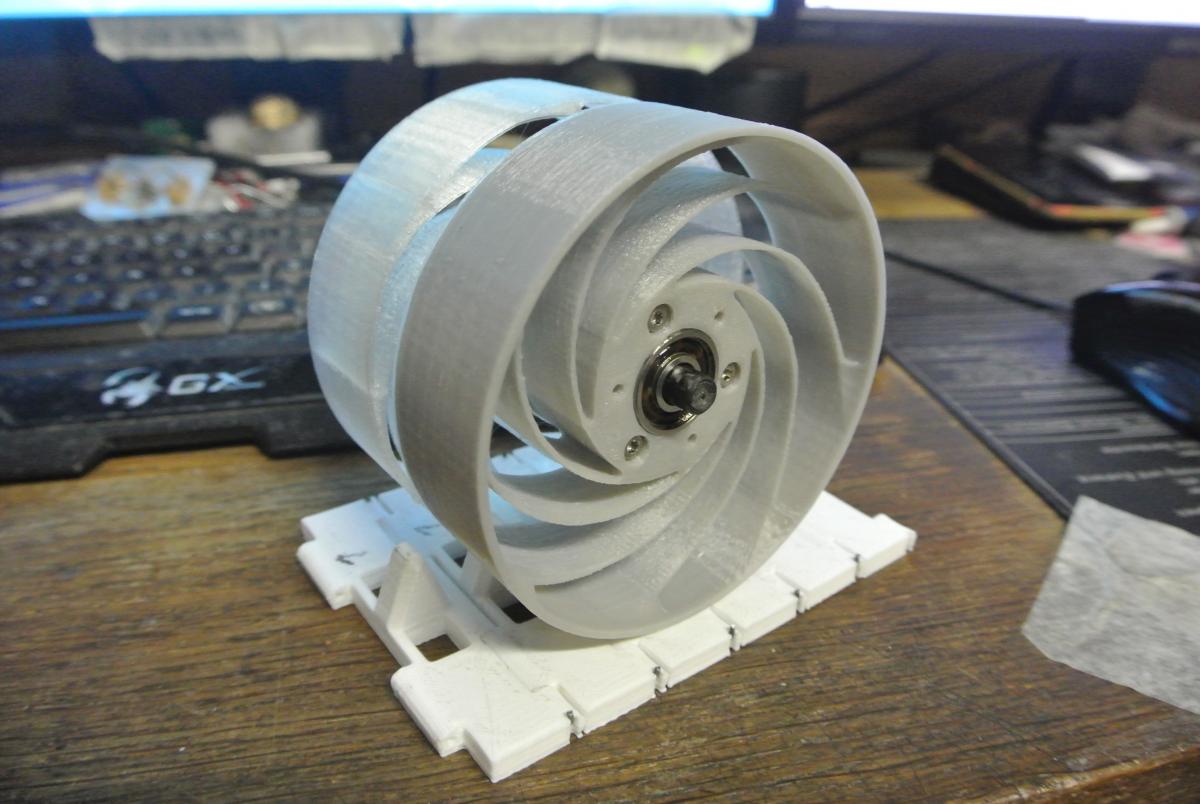
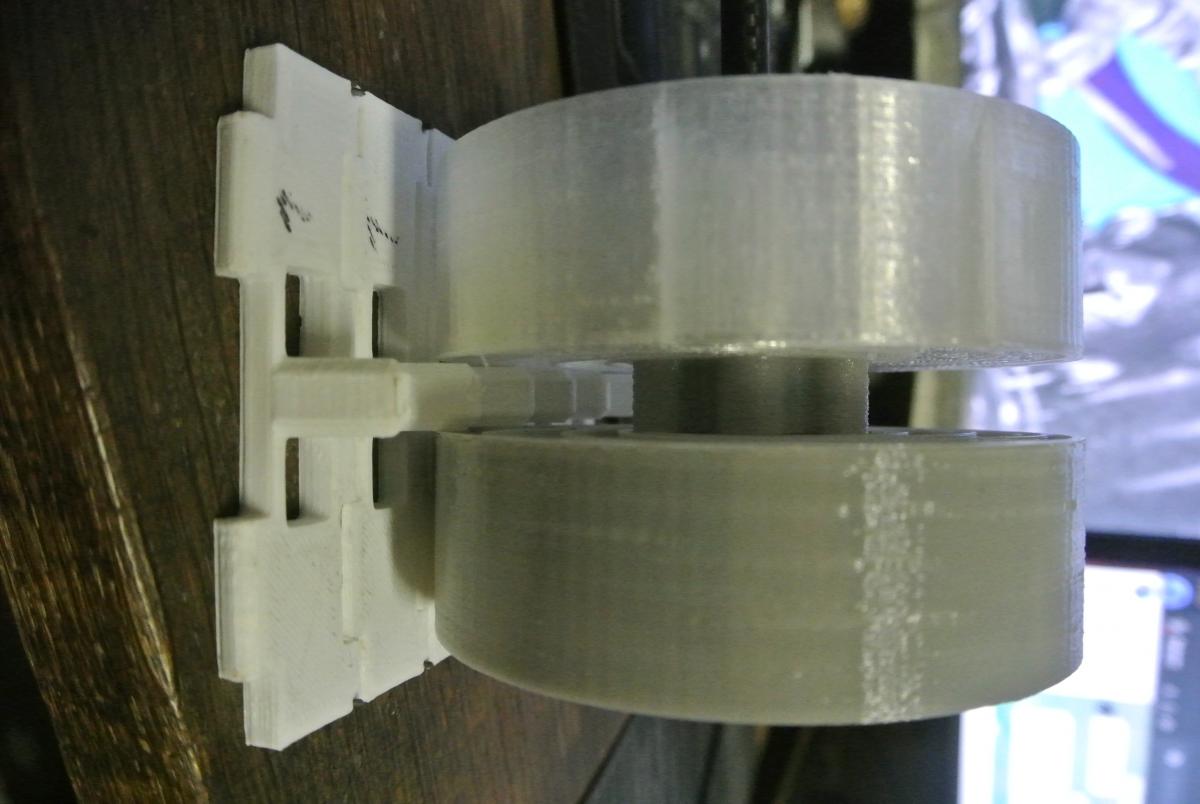
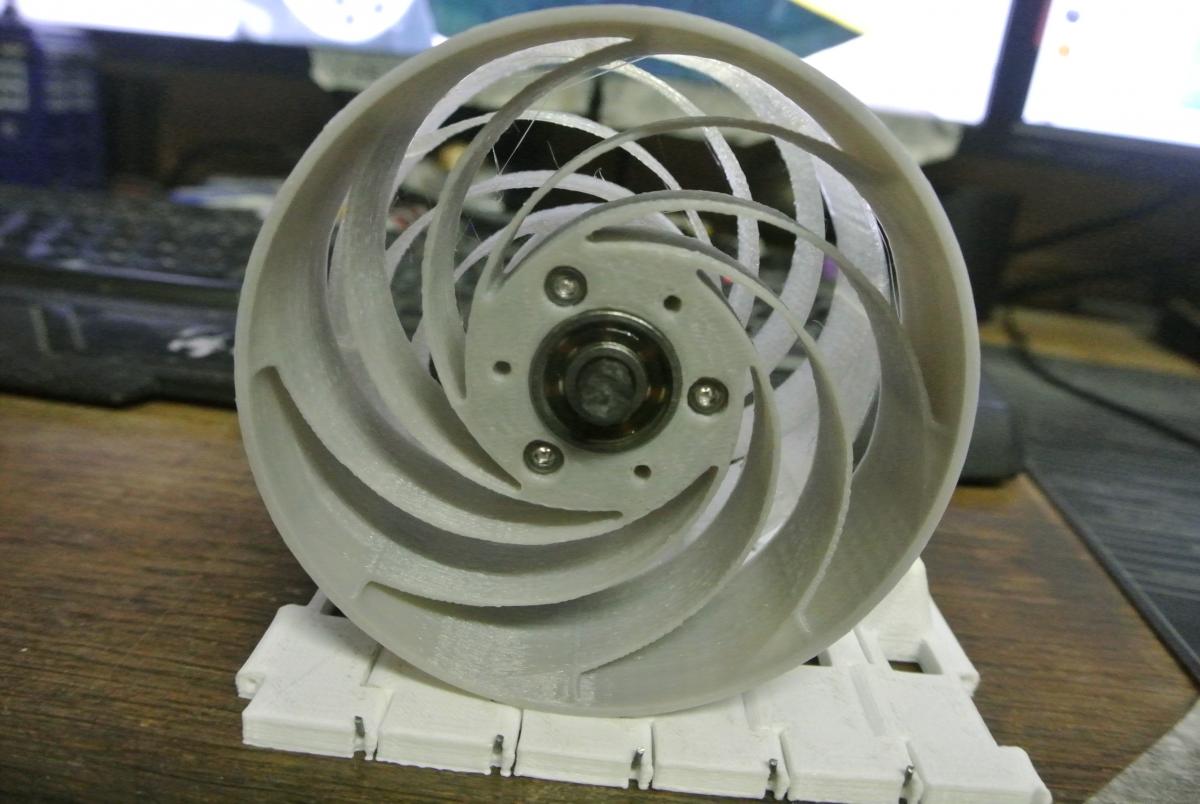
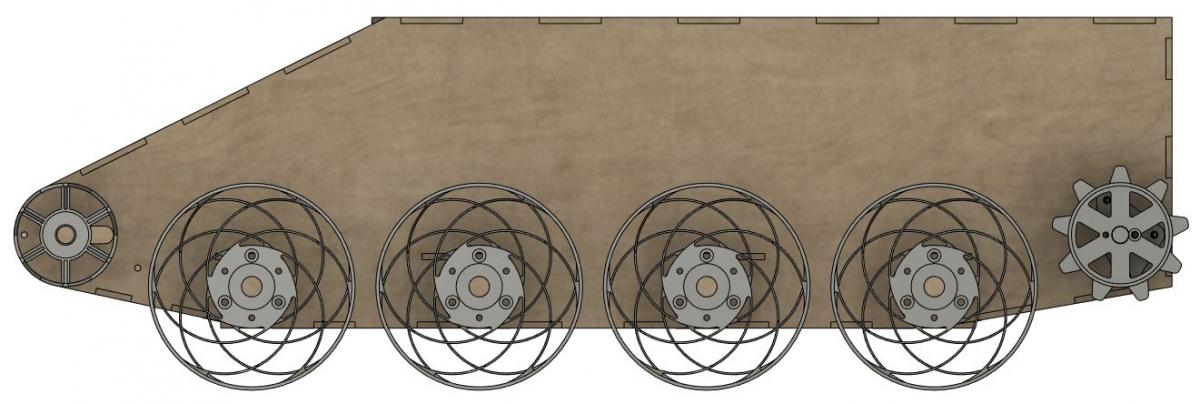
Les chenilles, roues et réducteurs seront imprimés en PLA, il utilisera des axes en tige d'acier de 8mm et des moteurs brushless de 400kv donc lent mais avec du couple. Les suspensions seront intégrées aux roues, sous forme de structure en spirale dans la roue elle meme, j'ai deja fait des lames ressorts en PLA et ça fonctionne pas trop mal donc ça vaut le coup de tester.
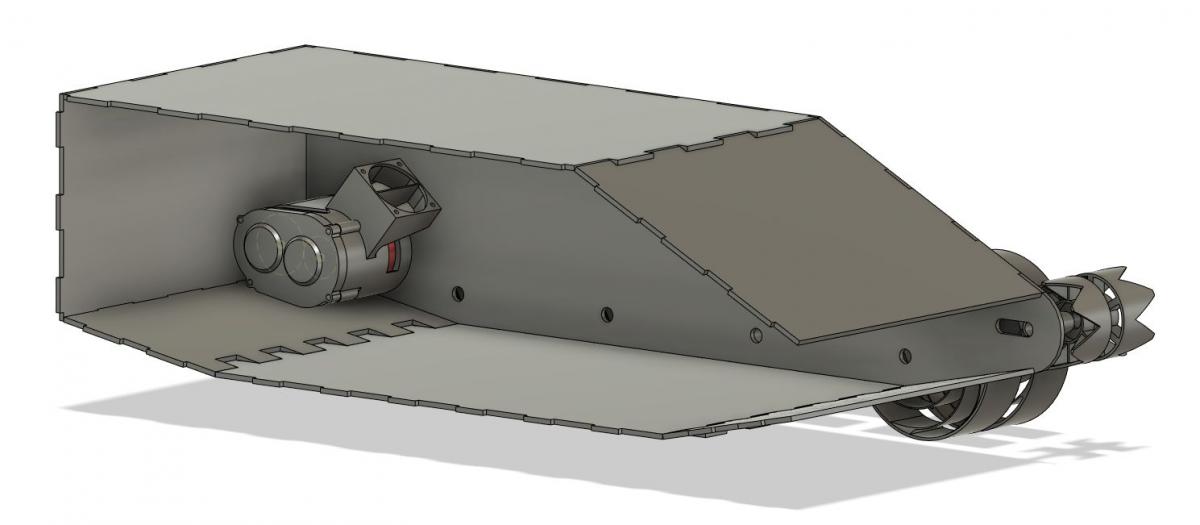
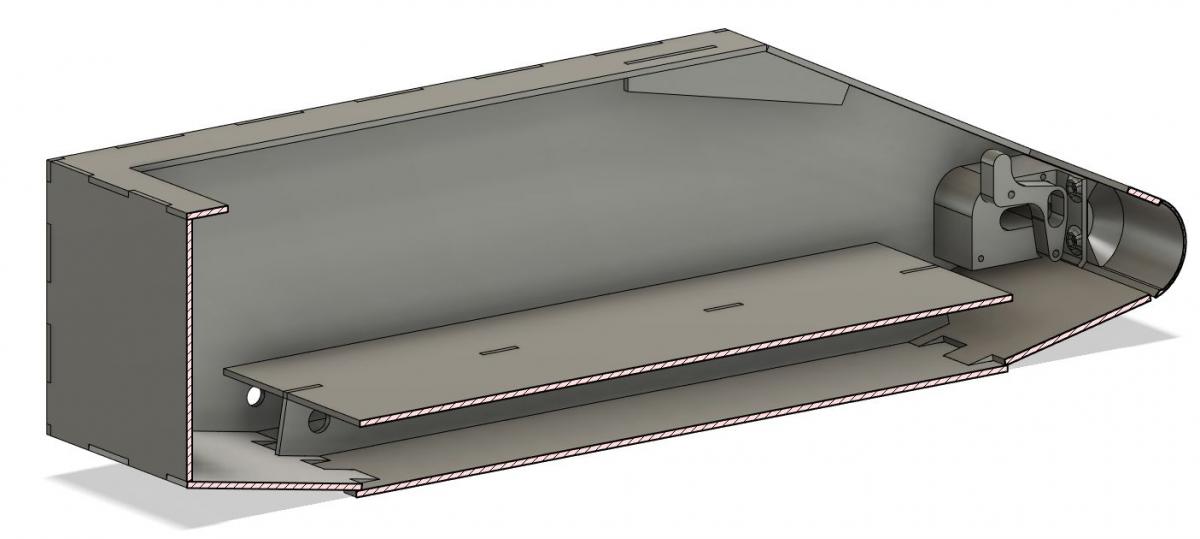
La caisse sera faite en contreplaqué de 3mm découpé au laser par des potes d'un fablab.
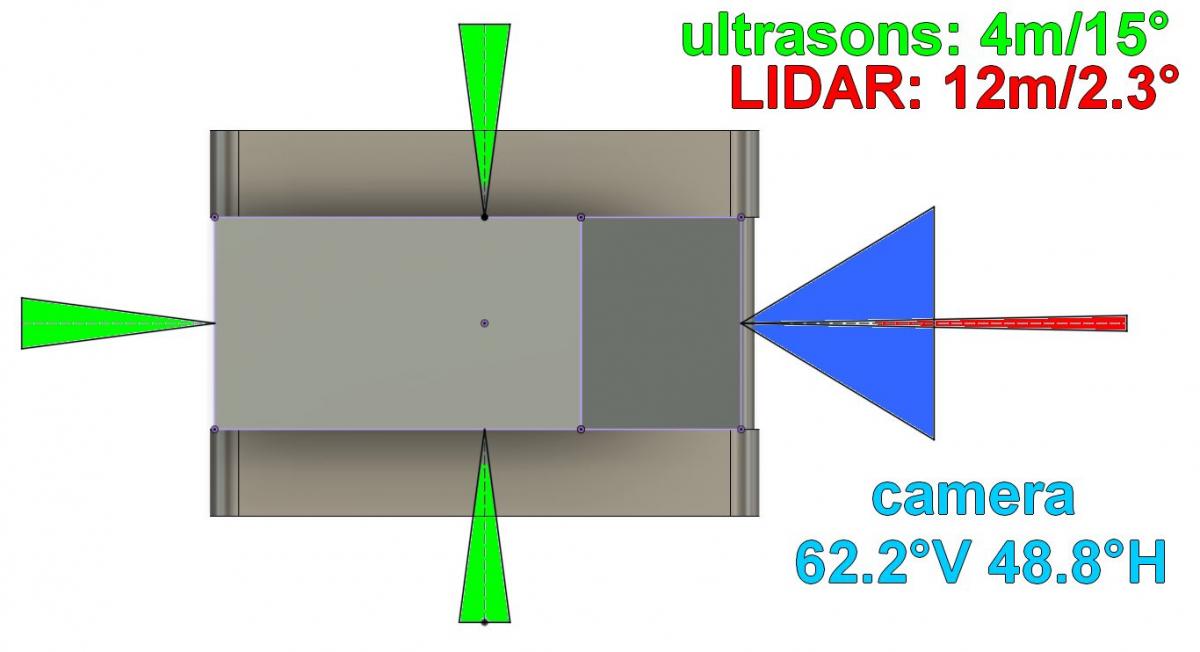
Pour les capteurs je suis pas encore sur, je voulais utiliser un raspi comme cerveau avec la camera pour analyse visuelle, un lidar devant et des capteurs ultrasons sur les cotés et derriere en plus d'un IMU mais ça va probablement changer.
Chaque reducteur aura un aimant dans l'engrenage de sortie pour utiliser un capteur a effet Hall pour connaitre la vitesse de chaque chenille, tout ça combiné devrais donner au robot la capacité de savoir ce qu'il est en train de faire.
Je suis encore au début du travail de design, pour le moment j'ai presque fini de designer les chenilles et une partie de la caisse mais il reste pas mal a faire (j'ai commencé y'a 2 jours aussi)
Dans tout les cas je pourrait probablement pas commencer l'assemblage physique avant noel donc je pense pas participer a la TRR de janvier mais ça me donneras plus de temps pour preparer la prochaine.
Si quelqu'un se sent de m'aider pour la programation de ce projet, ça m'arrangerais beaucoup vu que je suis pas trop capable de faire ça.
(motive toi et fait des trucs simple je sais, mais si j'ai pas un resultat tangible j'ai beaucoup de mal)