
Cela va prendre forme.
J'ai hâte de voir tes suspensions de chenille, à l'oeuvre.

Pilier du forum


Posté 13 janvier 2022 - 05:51
Cela va prendre forme.
J'ai hâte de voir tes suspensions de chenille, à l'oeuvre.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 16 janvier 2022 - 04:14
J'ai pu tester un peu le robot, les reducteurs ont clairement pas assez de couple pour tourner sur place ou prendre un obstacle a basse vitesse donc je vais en designer avec un ratio de reduction plus grand mais au moins il peut rouler convenablement autrement.
Aussi en conduite directe sans stab il derape assez facilement donc je vais essayer de le conduire a travers le controlleur pour au moins stabiliser la direction.
Je sais pas pourquoi mais 2 des roues arriere ont explosées en montant sur me trottoir donc je vais aussi changer le design des roues, j'ai le temps de faire tout ça en attendant que le plastique arrive.
Nouveau membre
Pilier du forum
Posté 18 janvier 2022 - 09:05
Super ! Bon, à la fin, il y a eu un peu de casse, mais c'est pas grave, le principe à l'air bon, il y a surement une modif qui va résoudre le problème.
J'imagine que la caméra était fixée sur le char, mais la question que je me pose est, comment as-tu suivi le char ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 18 janvier 2022 - 11:23
Simple, j'ai marché derriere.
pour le moment je test en radiocommandé comme ça c'est plus simple et je peut bien m'amuser.
Pour la casse ouai, faut globalement que je refasse toutes les roues a droite.
Le nouveau design des suspensions me semble correct mais dans ce cas la c'etait bien au dela de ce qui etait prevu donc c'est normal que ça ai cassé.



Pilier du forum
Posté 19 janvier 2022 - 07:52
L'aiguille est vraiment tordue. Peut-être, devrais-tu ajouter un maillon à ta chaine ?
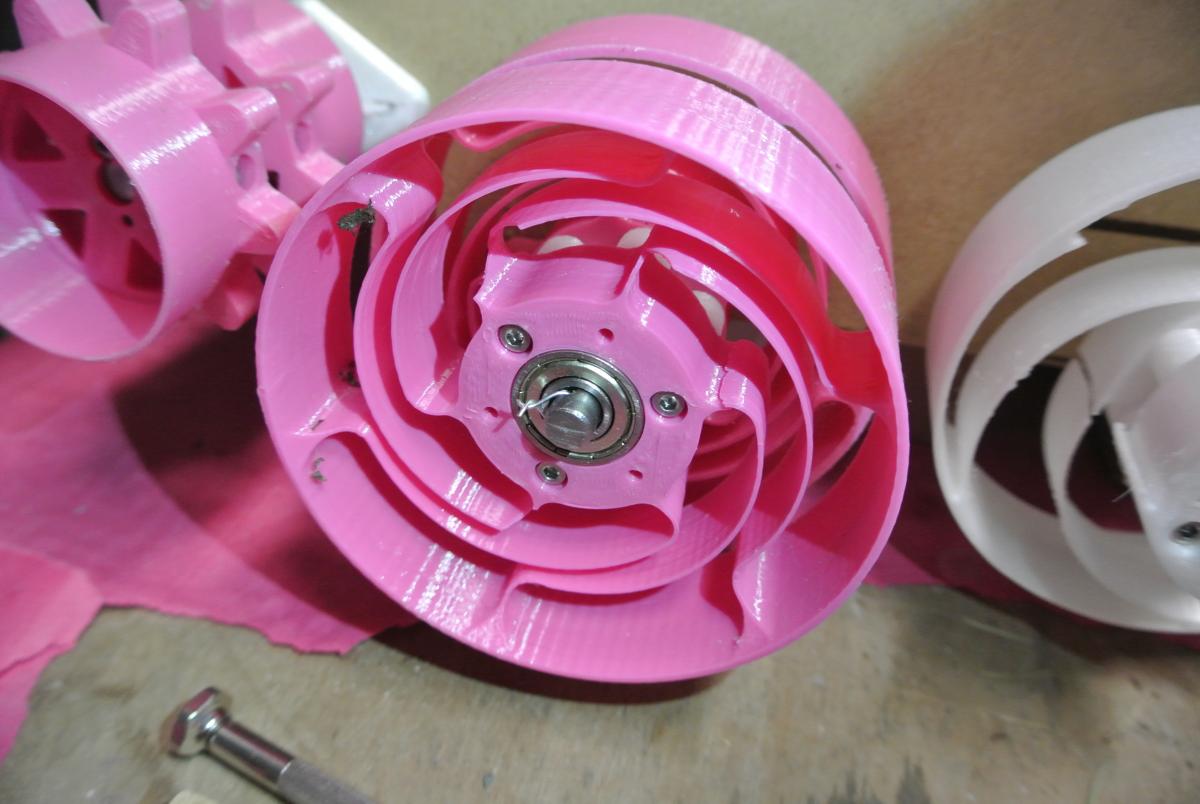
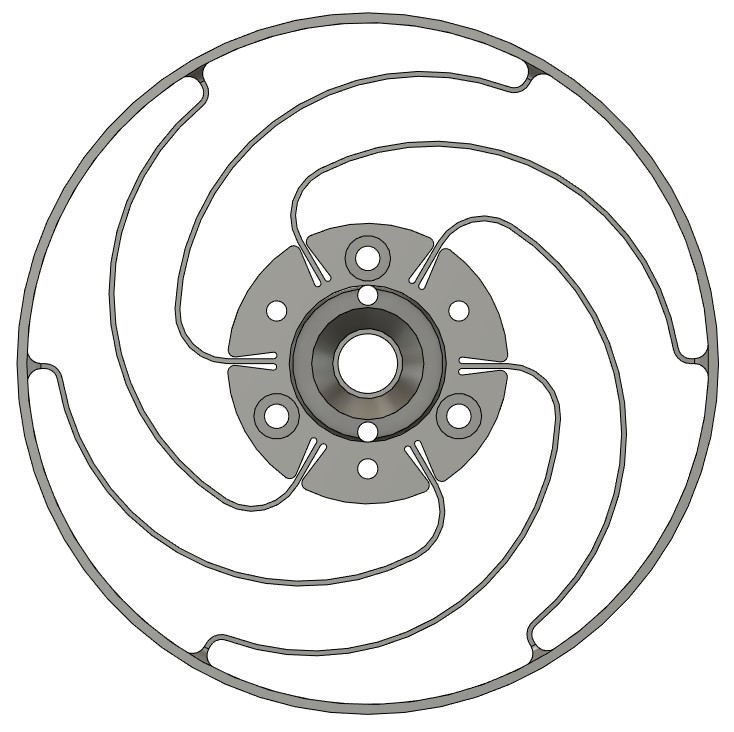
Je constate que ton nouveau roulement rose a l'attache de la suspension perpendiculaire à la circonférence, alors que précédemment, sur les roulements blanc, l'attache était en angle aigu.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 19 janvier 2022 - 01:04
La chenille fait actuellement la bonne longeur, elle a cassé parce que pendant le drift elle a acroché sur une asperité de la route en glissant lateralement et ça l'a arrachée vers le coté.
Sur l'ancien design les rayons cassaient tout le temps au niveau du hub, sur le nouveau j'ai un rayon plus large qui est plus flexible et permet plus de mouvement.
Nouveau membre
Posté 21 janvier 2022 - 07:41
J'ai encore un peu affiné le design des roues, j'ai remplacé tout ce qui manquais et j'ai fait 900m de conduite avec pour tester.
Le nouveau design a l'air de tres bien fonctionner, je vais essayer de poster une video demain.
J'ai aussi ajouté un peu de smoothing sur la commande de puissance, au lieu de reagir directement une limite de changement de valeur de la commande est appliquée donc ça limite l'acceleration/deceleration ce qui fait que la chenille se met pas a derapper, un peu comme un ABS.
En plus du PID sur la direction ça fait que le tank part pas en derapage tout seul et qu'il est beaucoup plus facile a controller, si je lache le manche a plein vitesse il ralentis tout seul et s'arrete sans se mettre a glisser.

Nouveau membre
Posté 22 janvier 2022 - 05:59
Pas encore de video des suspensions mais des bonnes nouvelles.
Quand j'avais fait les maths pour la vitesse quand j'ai conçu le robot j'etais arrivé a 16km/h mais vu qu'il va clairement plus vite que ça j'ai refait les maths et en vrai ça tombe plutot autour de 31km/h.
Avec mon cousin on est allé sur un bout de route a peu pres droit et plat pour tester ça le resultat etait 30km/h selon le GPS, malheureusement le DVR a pas enregistré mais j'ai cette vidéo.
Donc nouvel essai demain pour avoir la preuve en video.
Pilier du forum
Posté 22 janvier 2022 - 06:10
30kmh ! C'est énorme ! Bravo.
Ton objectif, c'est la vitesse ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 22 janvier 2022 - 09:20
A la base non, le nouveau design de reducteur va reduire la vitesse max a 10 mais il aura enormement de couple et sera plus facile a controller.
Deja pendant la conception je savais qu'il pourrait pas gagner la TRR sur le critere de la vitesse mais pour ce qui est du controle c'est autre chose!
Pilier du forum
Posté 23 janvier 2022 - 07:10
Impressionnant !
Au final, que penses-tu de tes galets à suspension intégrée ? Répondent-ils à ton attente ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 23 janvier 2022 - 07:25
Quand ça casse pas oui, meme avec des betises comme ça ils sont relativement résistants et quand il aura les nouveau reducteurs ce sera pas possiblde d'autant conduire comme un taré donc ça devrais mieux le faire aussi.
Pilier du forum
Posté 23 janvier 2022 - 09:25
Je trouve tes galets à suspension intégré, très intéressant, car ils permettent de simplifier la mécanique du char en supprimant les suspensions.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 24 janvier 2022 - 08:25
Deja pendant la conception je savais qu'il pourrait pas gagner la TRR sur le critere de la vitesse
Après avoir vu ta vidéo, j'ai un doute.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Nouveau membre
Posté 24 janvier 2022 - 06:29
Après avoir vu ta vidéo, j'ai un doute.
Certains robots ont une vitesse moyenne sur la piste plus haute que la vitesse max prévue de Wheelson.
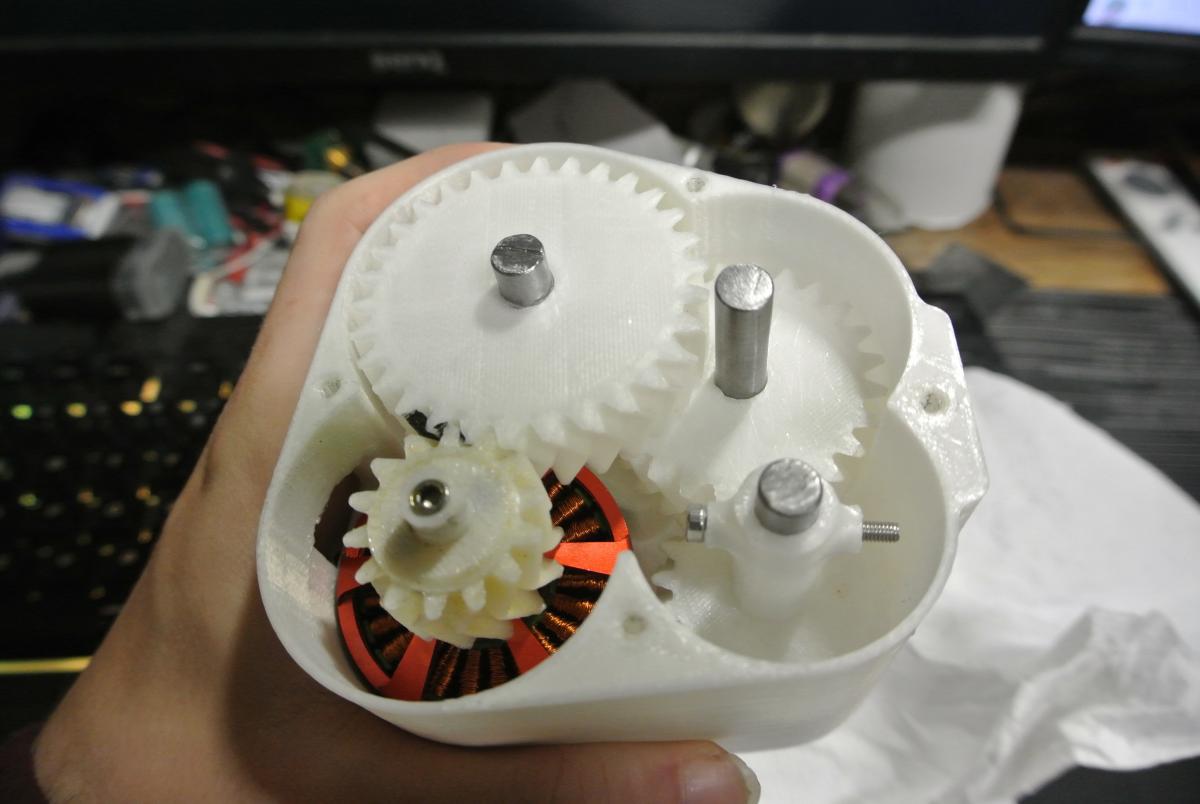
En parlant de ça j'ai imprimé et assemblé le premier des nouveaux reducteurs.
Le 2e est en train d'imprimer, apres ça faudra que je change encore quelque roues avant de le faire rouler a nouveau.

Pilier du forum
Posté 24 janvier 2022 - 07:36
A ce que je vois tu maitrise bien la CAO et l'impression 3D. Ton réducteur à l'air costaud.
Une chose m'échappe. Ton objectif était bien de participer à la TRR avec un char muni d'une caméra ?
Avec une HuskyLens, https://www.robot-ma...avec-huskylens/, tu peux facilement régler le problème.
Alors pourquoi, diminuer la vitesse ? Perso, j'aurais tendance à l'augmenter, si nécessaire.
Mais déjà, je trouve que le résultat est excellent.
Ma chaine YouTube : https://www.youtube..../oracid1/videos









0 members, 0 guests, 0 anonymous users






