tu peux toujours faire tes essais avec une balance de cuisine ou un pèse-lettres.
Pour le coup je pense qu'Oracid devrait pouvoir te donner des idées, il en a fait plein 

Membre chevronné


Membre passionné
Pilier du forum

Posté 28 janvier 2021 - 07:22
tu peux toujours faire tes essais avec une balance de cuisine ou un pèse-lettres.
Pour le coup je pense qu'Oracid devrait pouvoir te donner des idées, il en a fait plein
Je ne suis pas certain que mes réalisations dans ce domaine, soit au top.
Un bras qui appuie sur le plateau d'une balance me semble être encore la meilleur solution.
En tout cas, cette solution semble adopté par beaucoup de personnes.
J'ai fait un petit post ici, https://www.robot-ma...hless/?p=112749
En voyant cette vidéo, j'ai découvert que les moteurs de Cheetah avait un réducteur de vitesse intégré.
Je n'y connais rien, mais il me semble que mécaniquement, ce n'est pas très compliqué. J'ai vu beaucoup de personnes sur YouTube proposer la réalisation de moteur Brushless en I3D.
Alors, je me demandais si cela ne pouvait pas t'intéresser, ou peut-être, acheter quelque chose comme ça, 1 pièces X8308(Q9) KV100/KV135/KV170 moteur Brushless multi axes moteur de longue durée noir pour Drone de aéronef sans pilote (UAV) de plantes agricoles RC | AliExpress et bricoler la partie centrale.
Ceci dit, le quadrupède Solo, open-dynamic-robot-initiative/open_robot_actuator_hardware (github.com) a des moteurs qui me semble nettement plus accessible.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 28 janvier 2021 - 07:24
Qu'est ce que je disais !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 28 janvier 2021 - 07:57

J'ai référencé ce moteur dans le premier post de ce fil. Il a en effet un réducteur planétaire de 6:1.
Est-ce que vous avez des info techniques sur les servo hip/knee du spot Mini de Boston Dynamics ?
Tu as des exemples de réalisation avec les X8308. Peu d'informations sont données sur Ali. Il n'est pas très lourd (300gr).
J'aurais plus confiance en un petit T-motor ou MAD.
Il y a aussi le moteur Hobbyking de 100KV que Skyentific utilise, et qui est référencé sur le site d'Odrive. J'en ai deux en stock et j'avais fabriqué le Open Torque V2 couplé à Odrive. Mais très lourd. Pour un robot mobile, ca devient compliqué.
https://hobbyking.co...otor-motor.html
Pilier du forum
Posté 28 janvier 2021 - 09:20
Tu as des exemples de réalisation avec les X8308. Peu d'informations sont données sur Ali. Il n'est pas très lourd (300gr).
279g. Non, je n'ai pas d'exemple, il semblerait qu'il soit utilisé sur du gros drone.
Le Multistar 9235 est plus cher, mais surtout, plus lourd, 674g.
Les T-motor, très joli, mais chers également.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 29 janvier 2021 - 10:16
J'ai essayé....
Je trouve que le respect des côtes et l'insertion des bons jeux sont vraiment critiques pour ce genre de réducteur. Le mien n'est pas réversible, une partie du couple est perdu dans la mécanique et le jeu en sortie est considérable.
Je me demande si va vaut la peine de s'acharner sur ce type de réalisation. Je ne sais pas quoi améliorer si je devais persévérer dans ce type de réducteur. Et pourtant, certains y arrivent bien.
Je pense pourvoir mieux faire avec un réducteur de type planétaire, plus ordinaire. Mais le ratio sera limité.
Finalement, les courroies, c'est pas mal. Faut deux étages pour arriver à faire 1:10 dans un encombrement réduit.
Sinon, j'ai l'impression que mon algorithme de FOC ne parvient pas à exploiter mon moteur à son maximum. Je me demande ce qui cloche. A investiguer...
A suivre.
Pilier du forum
Posté 30 janvier 2021 - 07:38
Oui, mais du coup ton bras n'est plus élastique. Je pensais que c'étais le principal intérêt que tu recherchais avec un moteur Brushless.
Là, tu as fait un servo Brushless. Alors, il est peut-être plus rapide qu'un servo de type RC.
Le gros avantage de ton servo, c'est que le réducteur est dans l'axe du moteur.
Néanmoins, un réducteur, déporté à l'avant du moteur, double son épaisseur.
Alors que le principe de réduction du moteur Cheetah a comme gros avantage de ne pas augmenter son épaisseur.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 30 janvier 2021 - 08:55
Bonjour,
En effet, le servo moteur Cheetah est un bel exemple d'intégration mécatronique.
Comme on peut le voir dans cette vidéo, le réducteur est placé à l'intérieur du groupe de bobines, et cela évite de le déporter en ligne avec le moteur.
Viser un tel niveau d'intégration, sans expérience et avec des petits moyens (I3D, etc) me semble trop ambitieux !
En principe, un réducteur (épicycloïdale, cycloïdale et même vis sans fin) est réversible. C'est notamment une question de qualité de fabrication (frottements) et de ratio de réduction faible avant tout.
Je l'ai même prouvé avec le micro servo avec un ratio de 300 dans une démo précédente (aidé d'une bonne gestion électronique du moteur) !
Sur mon imprimante 3D, en déplaçant le plateau en Z à la main, j'arrive à faire tourner les moteurs pas à pas et à générer suffisamment de courant pour faire démarrer la carte de contrôle de la machine...et c'est une vis trapézoïdale !
Je reconnais que ma première réalisation est un échec. Je me doutais bien qu'il serait difficile de parvenir à un bon résultat du premier coup, en 24h. Je constate à la fois trop de frottements là ou il ne faut pas, et trop de jeu là où il ne faut pas non plus, Cela engendre cette irréversibilité du mécanisme, malgré un faible ratio, et l'emploi d'un moteur brushless. J'ai testé moteur éteint, ca ne change rien. Moteur retiré, c'est pratiquement aussi mauvais ! C'est de la qualité de fabrication qui pose problème.
Au sujet de l'intégration mécatronique, on verra dans un second temps, sur la base d'une solution maitrisée. A ce stade, je pense pouvoir réduire l'encombrement du réducteur en retouchant quelques éléments de conception, toujours sans modifier le moteur brushless. L'idée de partir d'un groupe de bobines et d'une cage avec aimants prête à etre customisée, est intéressante. On trouve des formes de kit moteur brushless sur Ali. La qualité de bobinage n'a pas l'air top non plus.
Des makers ont réussi (avec des moyens d'usinage) à optimiser l'épaisseur du réducteur tout en le mettant en ligne en sortie du moteur :
Enfin, le fait que le réducteur soit en ligne avec le moteur et l'augmentation la hauteur totale du servo commande, peut être une caractéristique recherchée. Je pense notamment à la réalisation de Paul Gould.
Patrick.
Membre chevronné
Posté 30 janvier 2021 - 10:21
Clairement l'imprecision des imprimantes 3D du commerce démontrent leurs limites dans ce type de montage
Même dans 2eme vidéo de ton post précédent, où le mec a usiné des partie du réducteur, les engrenages sont imprimés,
et on voit que ça "accroche" quand il fait tourner le moteur à la main.
Pour ton réducteur cycloïdal, normalement il faut 2 plateaux pour axer l'effort.
Ce genre de réducteur est utilisé en industrie pour obtenir une réduction importante dans un volume minimum, et avec un minimum de jeu en sortie
(avec un réducteur classique il faudrait plusieurs étages de réduction, et on cumule les jeux à chaque étage)
Mais ce sont des réducteurs ULTRA chers car la précision mécanique nécessaire est ... ULTRA précise 
Pilier du forum
Posté 30 janvier 2021 - 02:48
Tu te sous-estimes. Je ne crois pas que ce soit hors de ta portée.
Il suffit de trouver le bon moteur Brushless, avec un évidemment central important. Le lien que je t'ai proposé plus haut allait dans ce sens.
Je le remets, ici, 1 pièces X8308(Q9) KV100/KV135/KV170 moteur Brushless multi axes moteur de longue durée noir pour Drone de aéronef sans pilote (UAV) de plantes agricoles RC | AliExpress
Je pense que tu peux le faire, même avec une I3D. Mais soyons clair, seulement s'il s'agit d'un prototype.
La vidéo de Mike K est un excellent compromis. D'autant que le moteur que je te propose fait 8mm d'épaisseur. Alors, pourquoi pas ? Là également, je pense que c'est à ta portée.
Concernant, Paul Gould, il met ses moteurs en série, alors que sur un Cheetah ou un Doggo, les moteurs sont en parallèles, d'où le problème de l'épaisseur. C'est un choix préalable qu'il faut faire.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 31 janvier 2021 - 12:51
Ce moteur a l'avantage d'être 'plat', mais je ne pense pas qu'on puisse intégrer le réducteur dans le stator, comme pour le servo Cheetah. Cela dit, il est très plat ! :-)
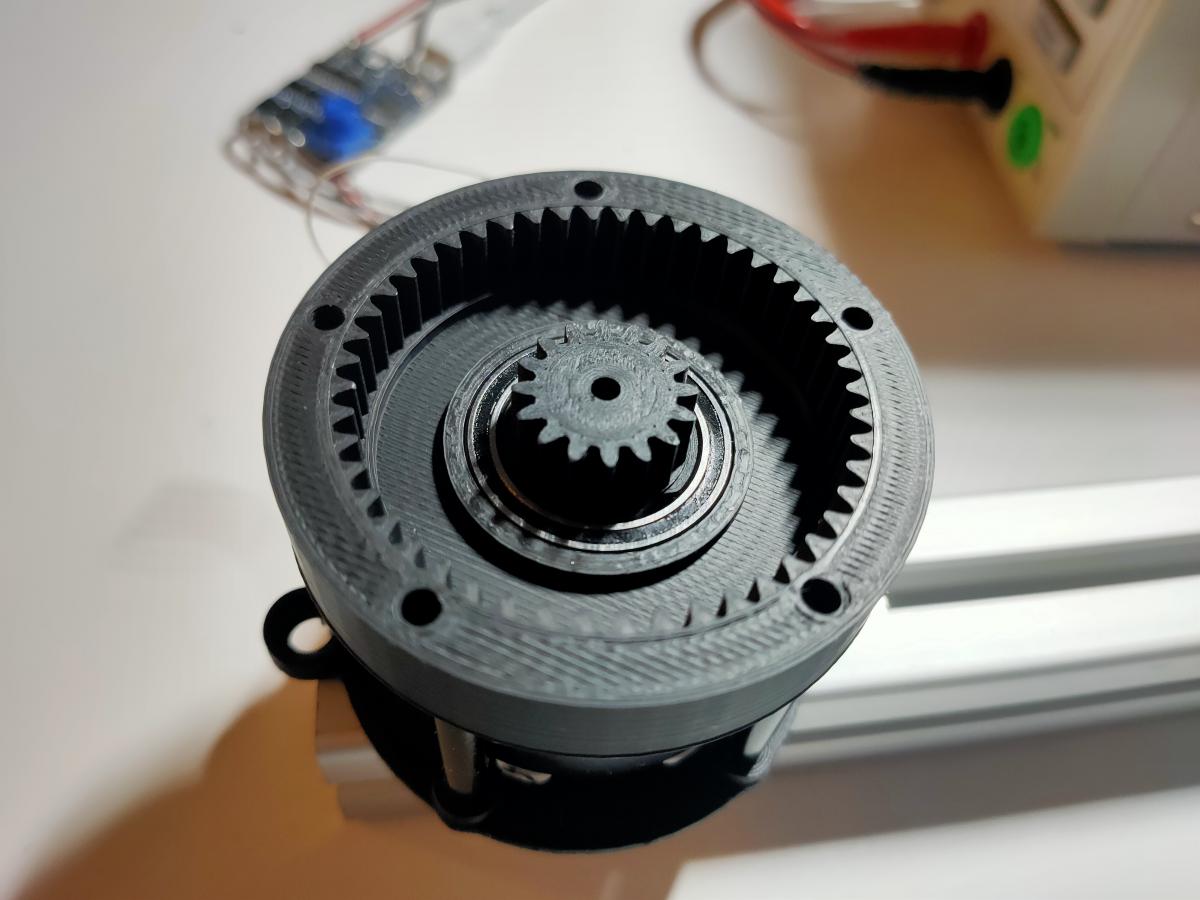
J'ai fait un essai avec un réducteur planétaire. Ca ne fait pas avancer la science, mais ca me rassure !

Ca fait un drôle de bruit. Il était tard, j'ai rempli le carter de graisse. Du coup, ca colle un peu aux dents !
Les engrenages imprimées en PLA et en ABS, ca va bien jusqu'au module 1. Je vais essayer le nylon demain. J'ai une bobine de Taulman3D Alloy 910 à tester.
Mike K. doit avoir une bonne CNC sous la main ! Il a fait une réalisation assez compacte. Je vais peut etre m'en inspirer. Il y a du travail pour arriver à un tel résultat !
Je suis toujours pas satisfait du couple en sortie de réducteur. Je vais devoir retoucher mon code du contrôleur brushless. Le moteur ne semble pas exploité au maximum de ses capacités.
A suivre.
Pilier du forum
Posté 31 janvier 2021 - 08:17
Beaucoup moins compliqué ! Pourquoi 4 satellites au lieu de 3 ? Plus il y a de pièces et plus ça frotte, non ?
Je ne comprend pas comment tu fais la jonction axes des satellites avec l'axe de sortie. Peux-tu nous faire quelques images de l'éclaté de l'ensemble du réducteur ?
Je me demande, jusqu'à quel ratio, peux t-on aller, pour garder de l'élasticité sur le palonnier ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 31 janvier 2021 - 08:37
Bonjour,
J'ai utilisé la calculette, qui recommande 4 satellites.
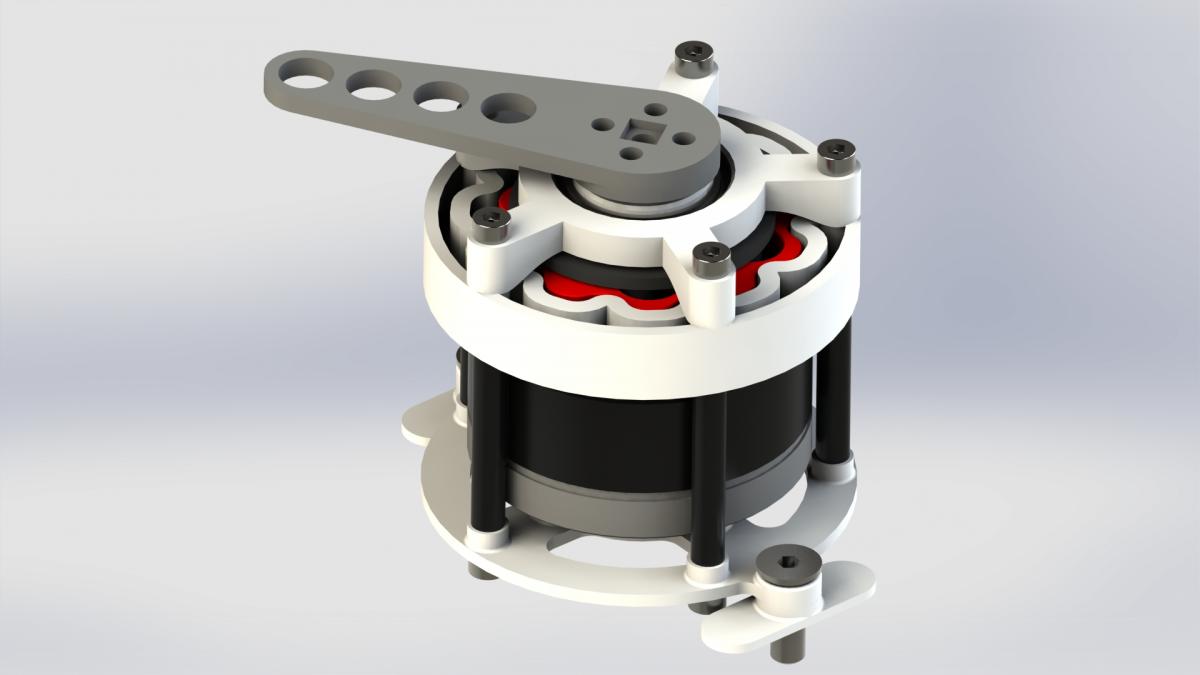
Les satellites sont montés (press-fit) dans le porte-satellites à l'aide d'un roulement et le porte-satellites à une grosse empreinte hexagonale dans laquelle se fixe le palonnier. Je fais un éclaté en fin de matinée.
Patrick.
Membre passionné
Posté 31 janvier 2021 - 11:23
En pièce jointe, l'éclaté comme promis ! Note : Un roulement a disparu dans l'animation ( celui qui se trouve autours du planétaire, coté moteur).
Je pense que dans le cas d'un moteur brushless normal (pas gimbal), le roulement atours du pignon planétaire ne sert à rien. C'est 1/3 de l'épaisseur du réducteur en moins.
Pour atteindre le ratio 1:10, faut terminer avec une courroie (c'est la solution qui me tente le plus, facile à réaliser et robuste), ou ajouter un étage de réduction, peut etre à la manière "compound" .
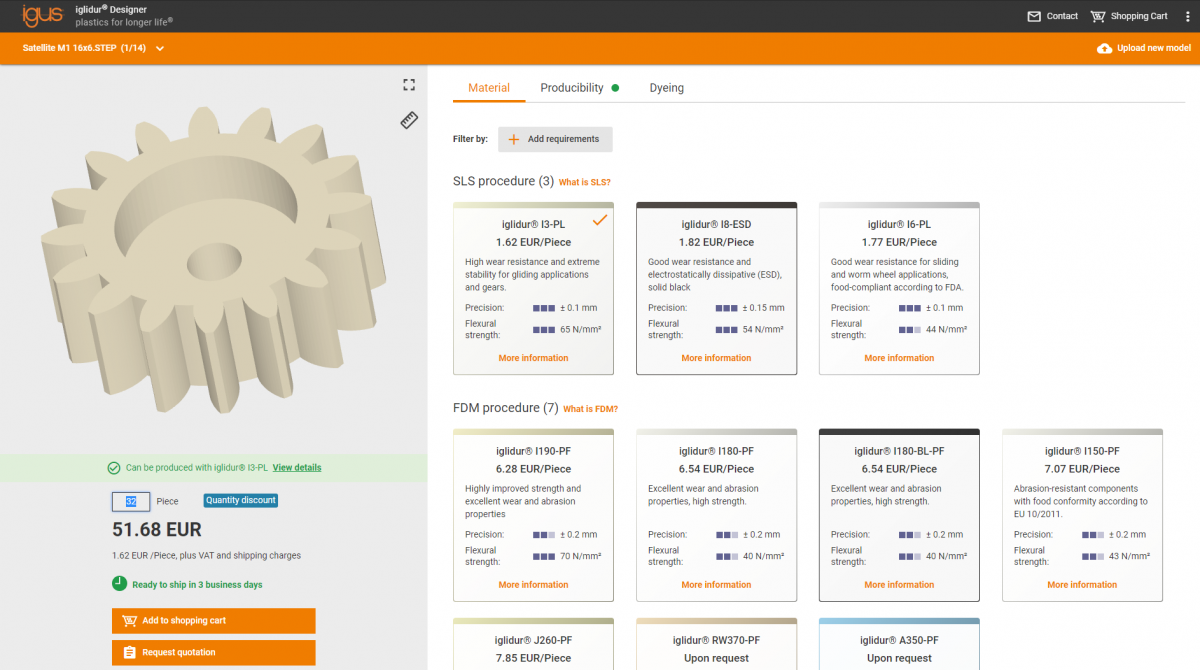
Sur Igus, les petits pignons (16T, M1) sur mesure sont pas chers. Pour la couronne, faut se contenter de l'ABS ou du Nylon. Pour 32 pignons, soit 8 servo complets :
Patrick.
 Eclaté.zip 4,42 Mo
154 téléchargement(s)
Eclaté.zip 4,42 Mo
154 téléchargement(s)
Membre passionné
Posté 31 janvier 2021 - 12:53
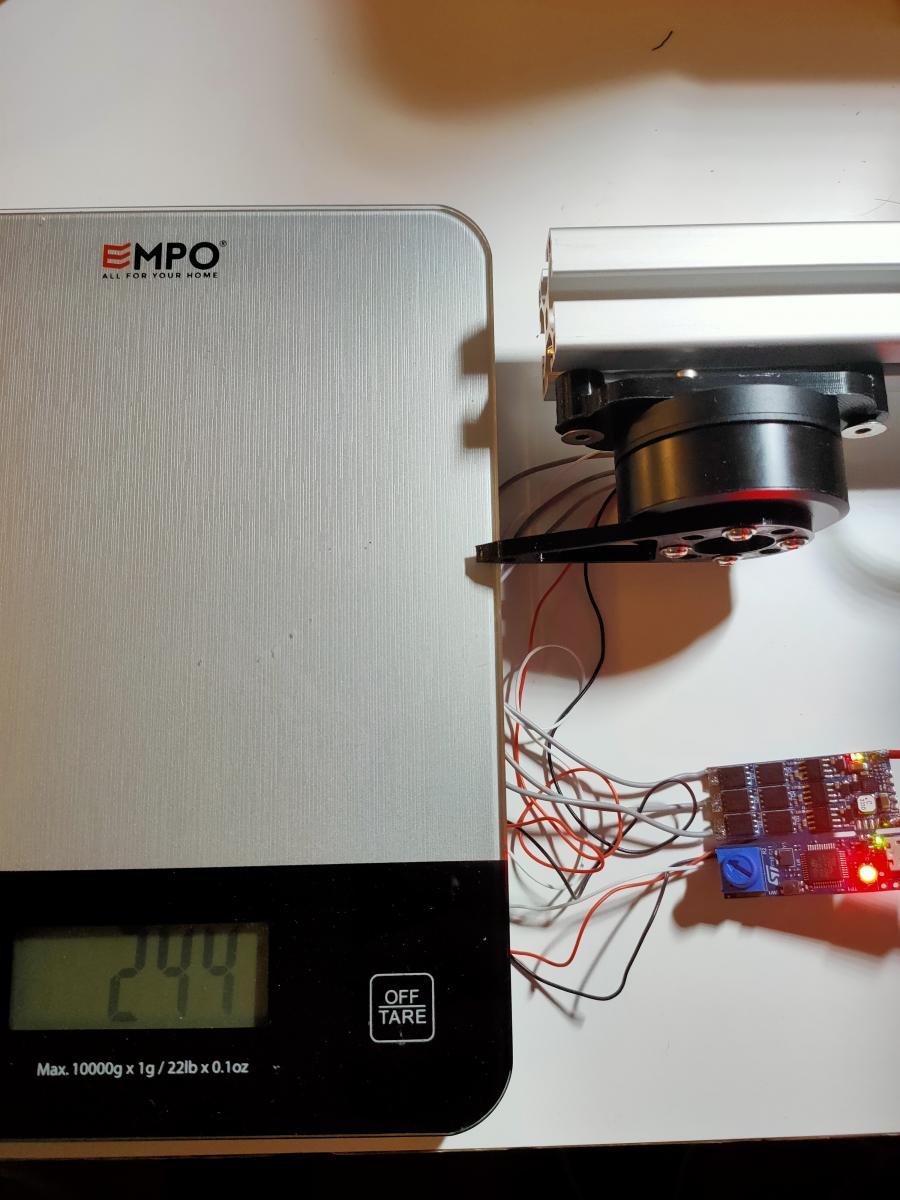
Finalement, j'arrive à sortir les 10kg.cm, soit 4x le couple nominal du moteur !
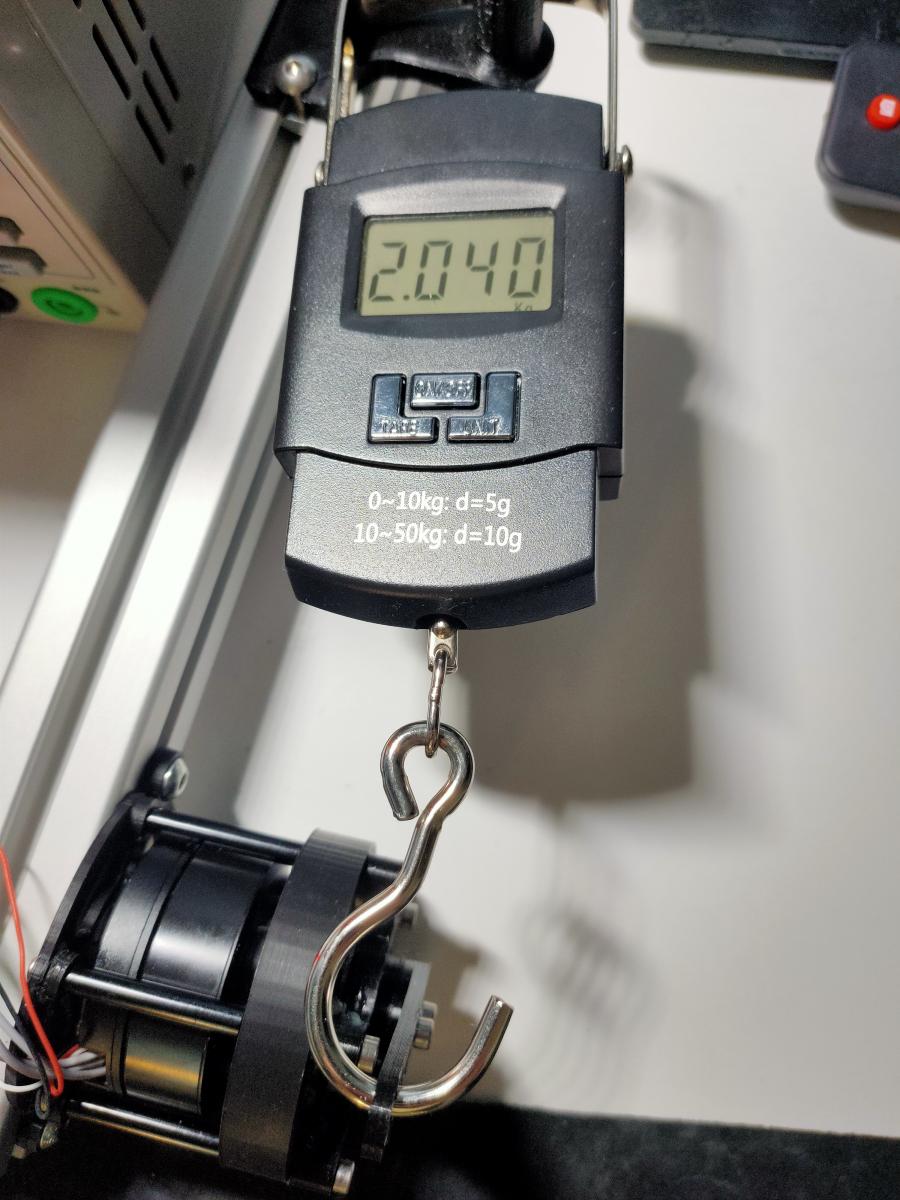
2Kg à 5cm sur la photo.
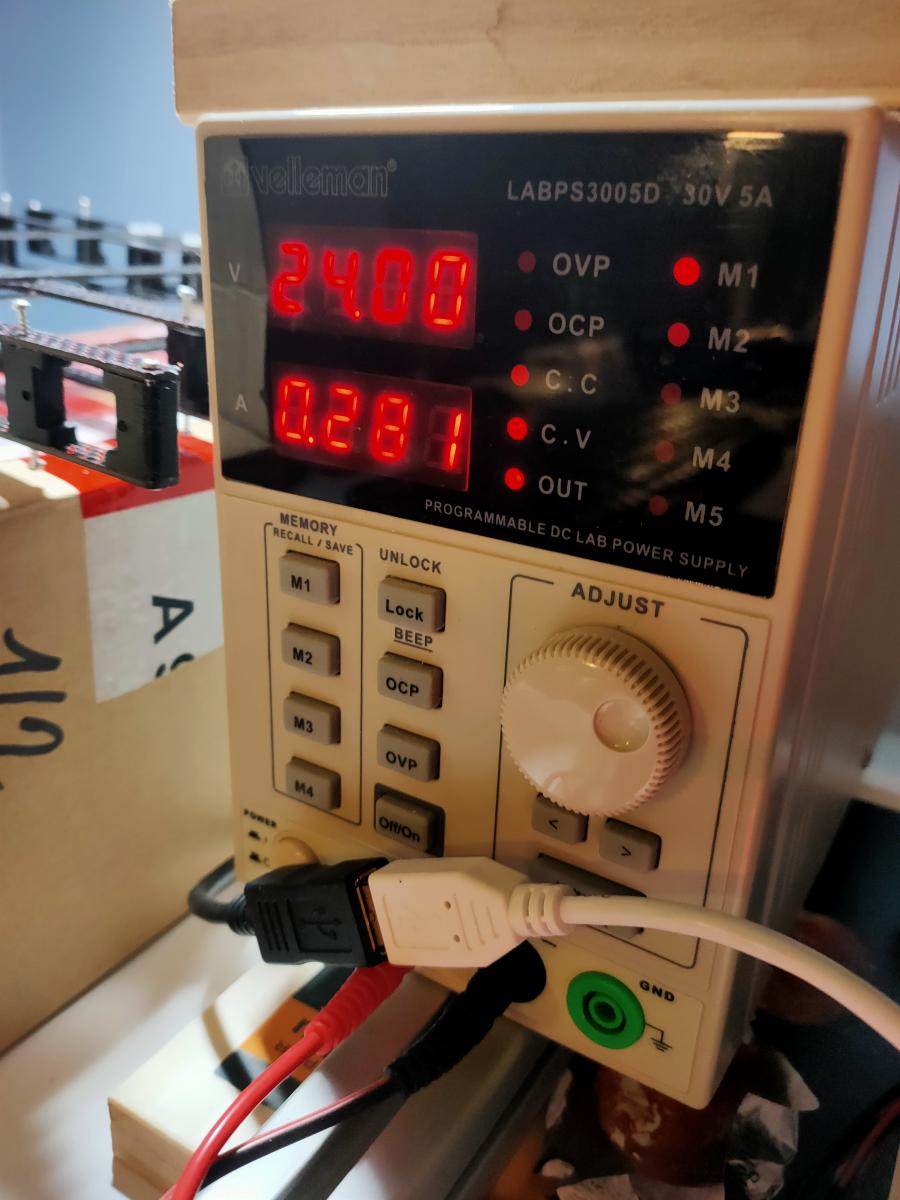
Dans cette configuration, le moteur est alimenté en 24V et il débite 1.4A (36W).
Le test est réalisé avec un FOC en boucle ouverte. La vitesse et le couple sont plutôt bons par rapport au moteur choisi.
Tout ca pour dire, que l'implémentation du FOC en boucle fermée est à retravailler. C'est peut etre juste le réglage des PI (Id et Iq) internes du FOC à revoir.
Sinon, le réducteur tient le coup.
A suivre.
Membre passionné
Posté 31 janvier 2021 - 12:53
<double post>
Pilier du forum
Posté 31 janvier 2021 - 01:03
Super l'éclaté ! J'en demandais pas tant ! Maintenant, je comprends bien le montage. Et tu dis que tu ne pourrais pas faire un montage du type Cheetah.
Je suis certain du contraire !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre chevronné
Posté 31 janvier 2021 - 01:05
Je ne sais pas si c'est l'angle de la photo, mais on dirait que la force n'est pas perpendiculaire au bras de levier (et si c'est le cas, alors la valeur est fausse...)
Membre passionné
Posté 31 janvier 2021 - 01:15
Oui, ce n'est pas dans l'axe! En fait, il doit faire dans les 11kg.cm.








0 members, 0 guests, 0 anonymous users