Cliquez moi.
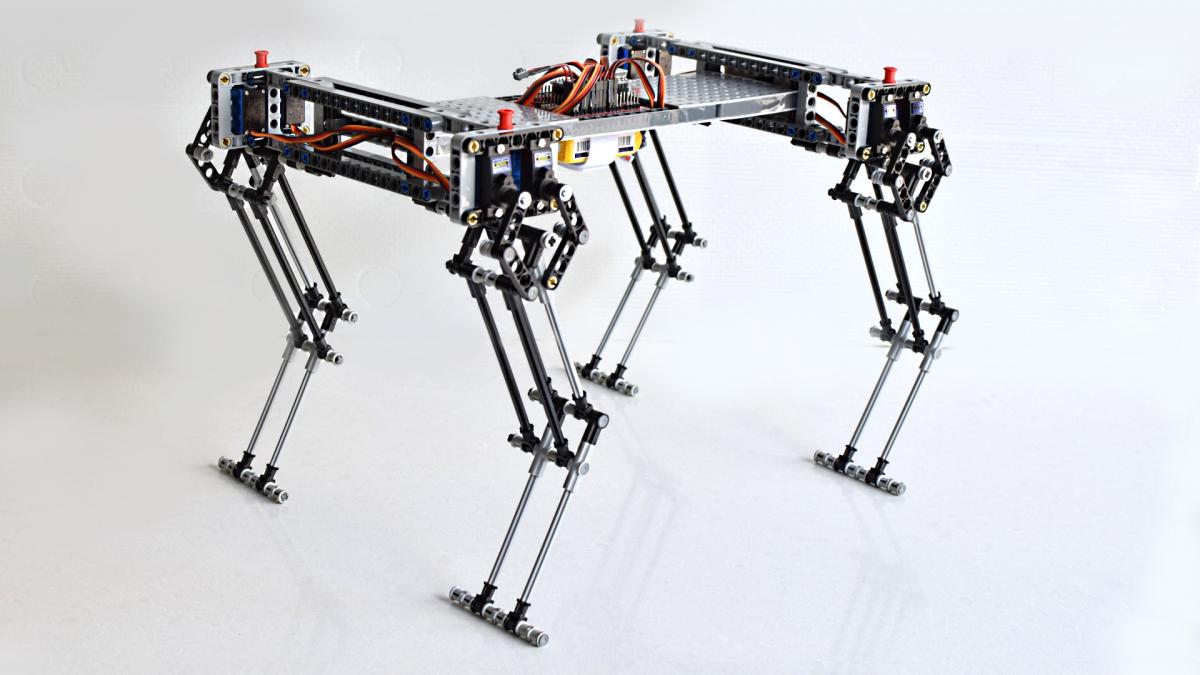
Voici la V2 de la série des 5 barres avec extension, 5BQE.
Dans cette nouvelle version, la structure de la patte est moins "épaisse", et la jonction de la patte au chassis a été relevée de 1L(8mm).
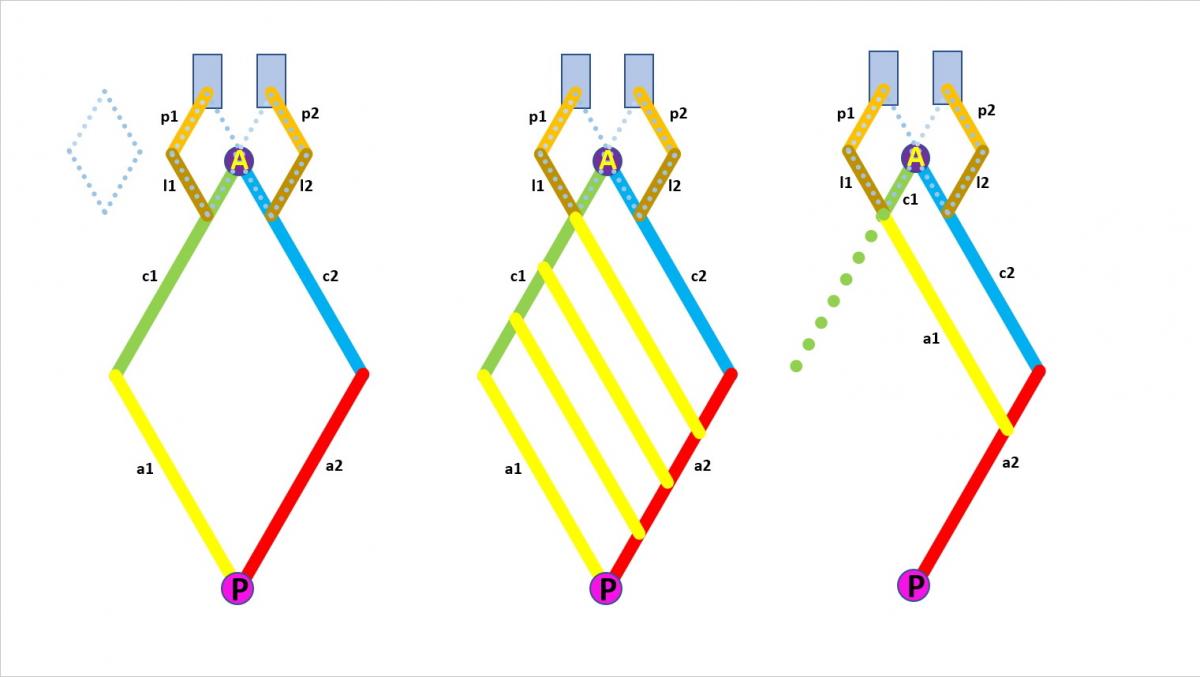
L'ancienne structure permettait aux deux fémurs de se relever en formant un V. Dans cette configuration, au repos, lorsque le quadrupède est aplati au sol, la patte est parfaitement horizontale et, donc, la position en V des fémurs n'est plus nécessaire. Cela est dû au fait que les fémurs et les tibias sont d'égale longueur. Une simplification mécanique, c'est toujours bon à prendre.
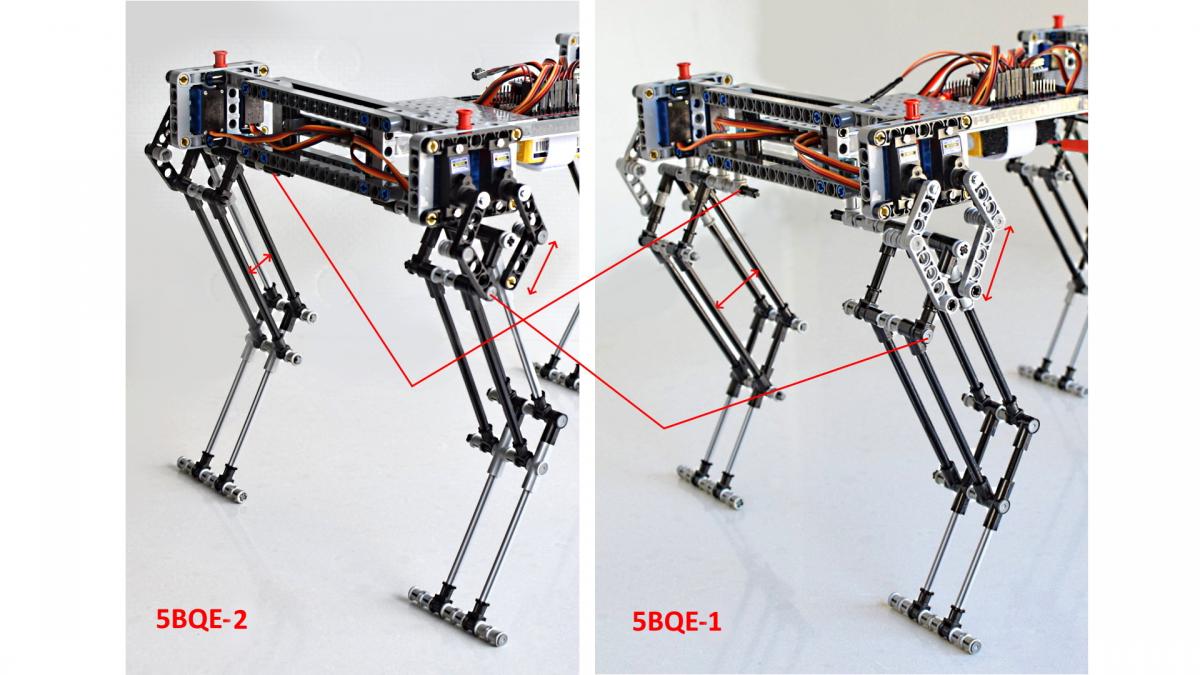
La diminution de l'épaisseur de la cuisse montre que le mouvement parallèle n'est pas un frein, et permet également de se rapprocher de la réalité biologique. L'esthétique de l'ensemble supporte parfaitement la comparaison avec un mécanisme série, mais avec un avantage mécanique évident.
Bizarrement, cette nouvelle version ne va pas aussi vite que la précédente. Elle atteint pas tout à fait les 10m en 10s. J'en ignore la raison.
L'image du bas met en évidence l'évolution de cette nouvelle version par rapport à la version précédente.