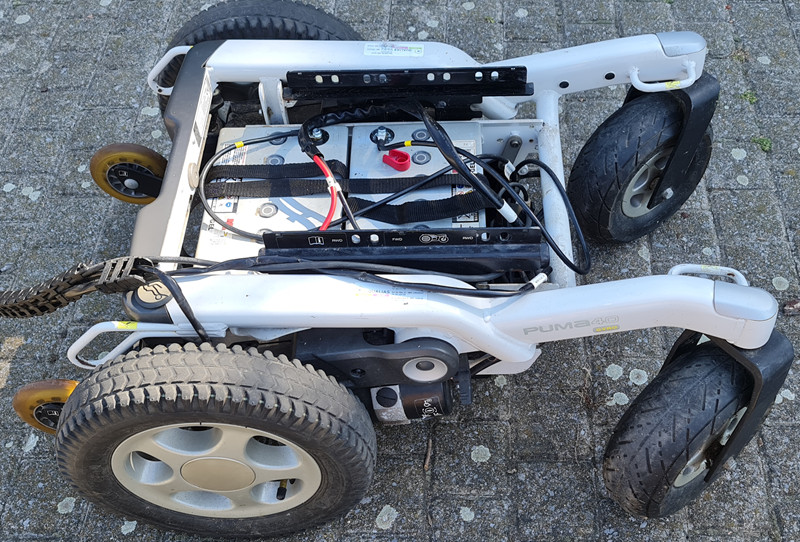
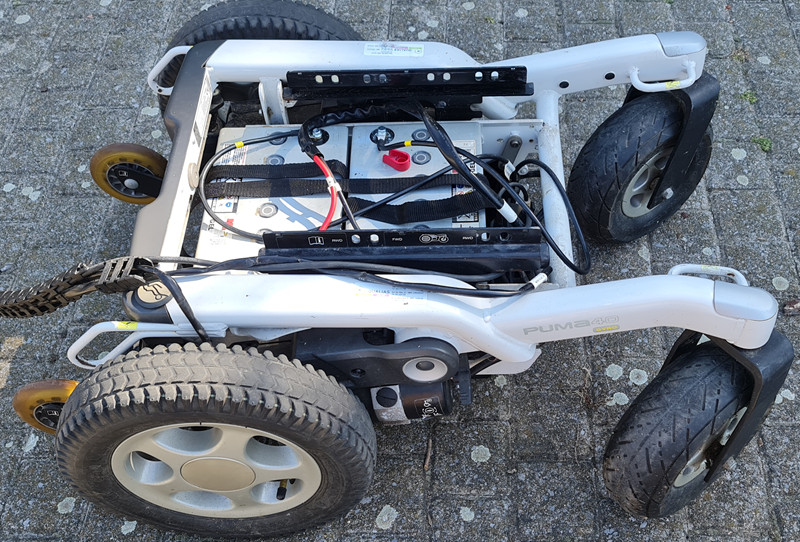
Bonjour oui effectivement c'est possible mais je n'ai plus le reste de la tondeuse sous la main.
Il faudrait voir ce qui sort avec un oscillo...
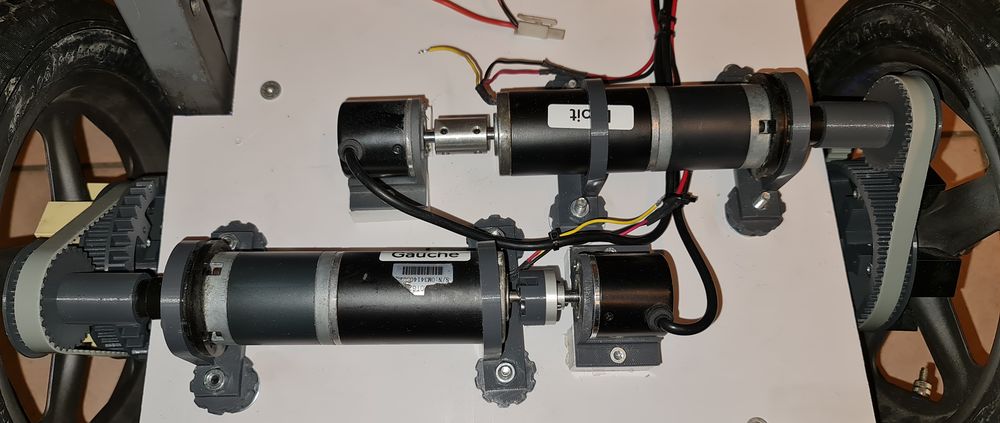
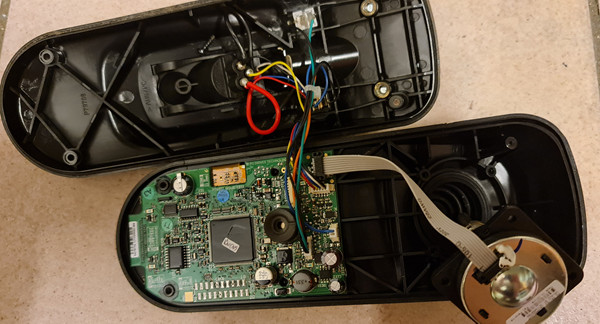
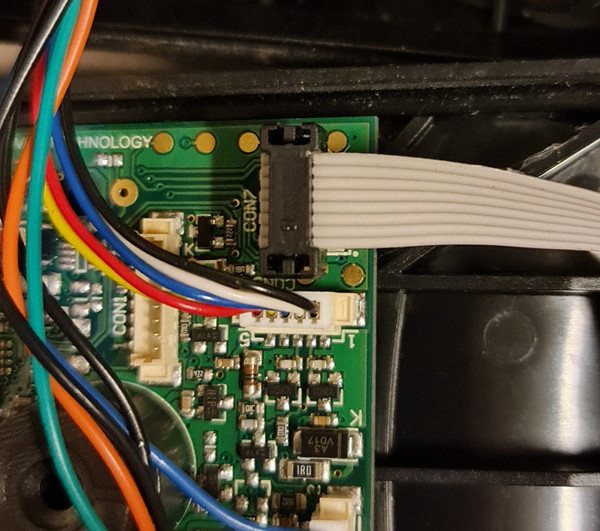
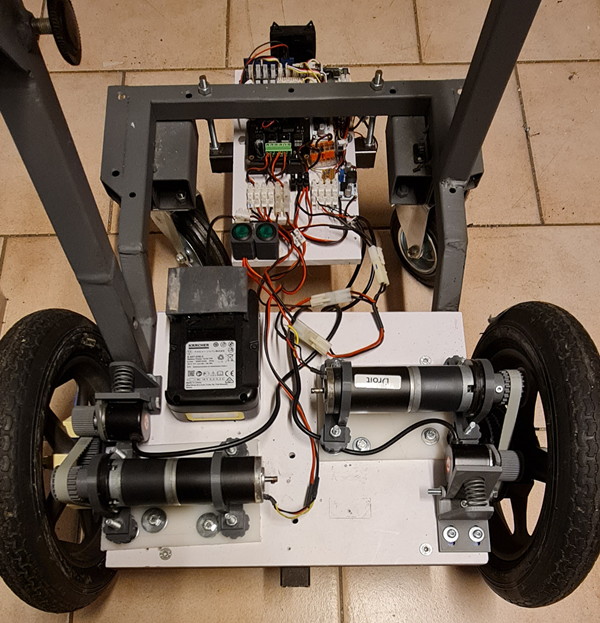
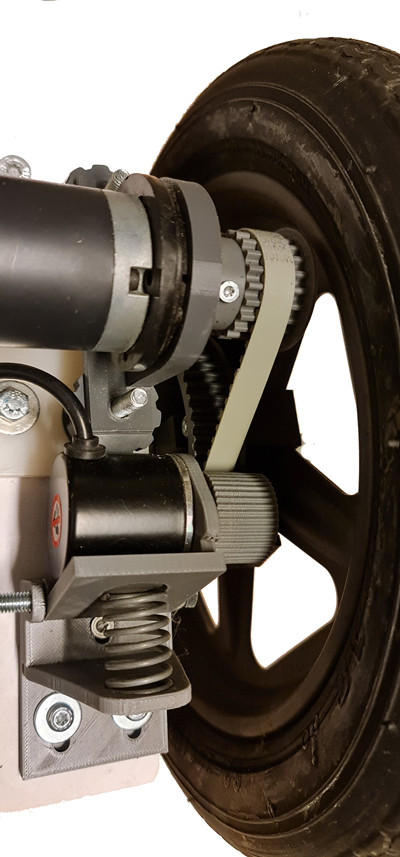
J'ai utilisé les moteurs pendant un bon moment et ils fonctionnent bien avec ce driver moteur.
J'ai mis des encodeurs rotatifs séparés. J'essaie d'avancer avec les éléments que je connais.
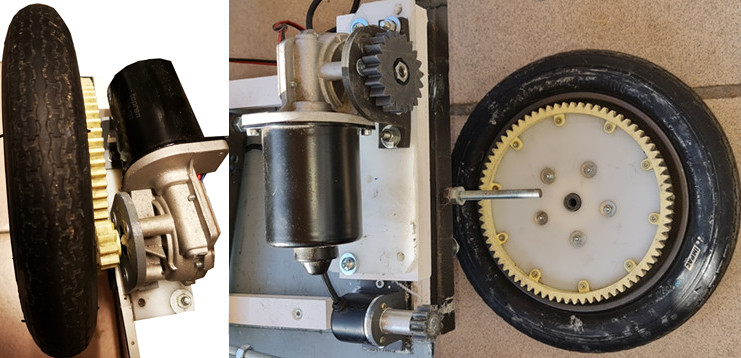
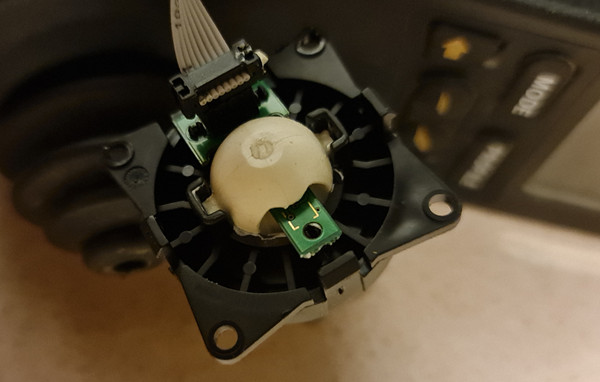
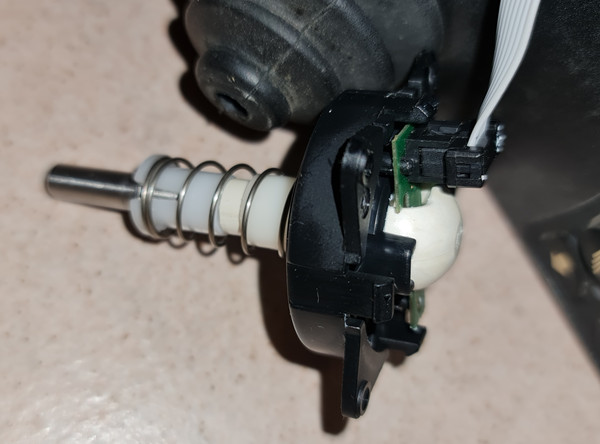
Mais sur ces moteurs il y a ceci :
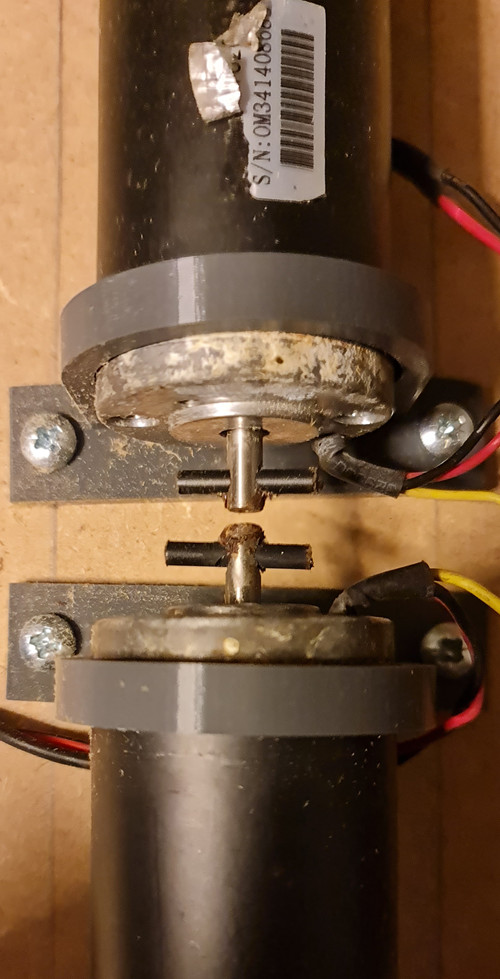
Qui tournent à la vitesse du moteur avant réduction.
C'est sûrement plus intéressant d'exploiter cela avec un capteur magnétique mais pas encore utilisé.