Bonjour
Des nouvelles de Jag'Bot I sous la canicule...
je n'arrive plus à progresser en vitesse , les performances atteintes sont pour l'instant:
* Sur tapis: 1.11 m/s (9s/10m)
* Sur terrasse composite: 1.08 m/s (9.3s/10m)
* Sur parquet vitrifié: 0.88 m/s (11.3/10m)
J'ai des essais à faire sur la forme et le revêtement des pattes pour progresser sur parquet vitrifié.
Et peut-être aussi revoir le code pour optimiser.
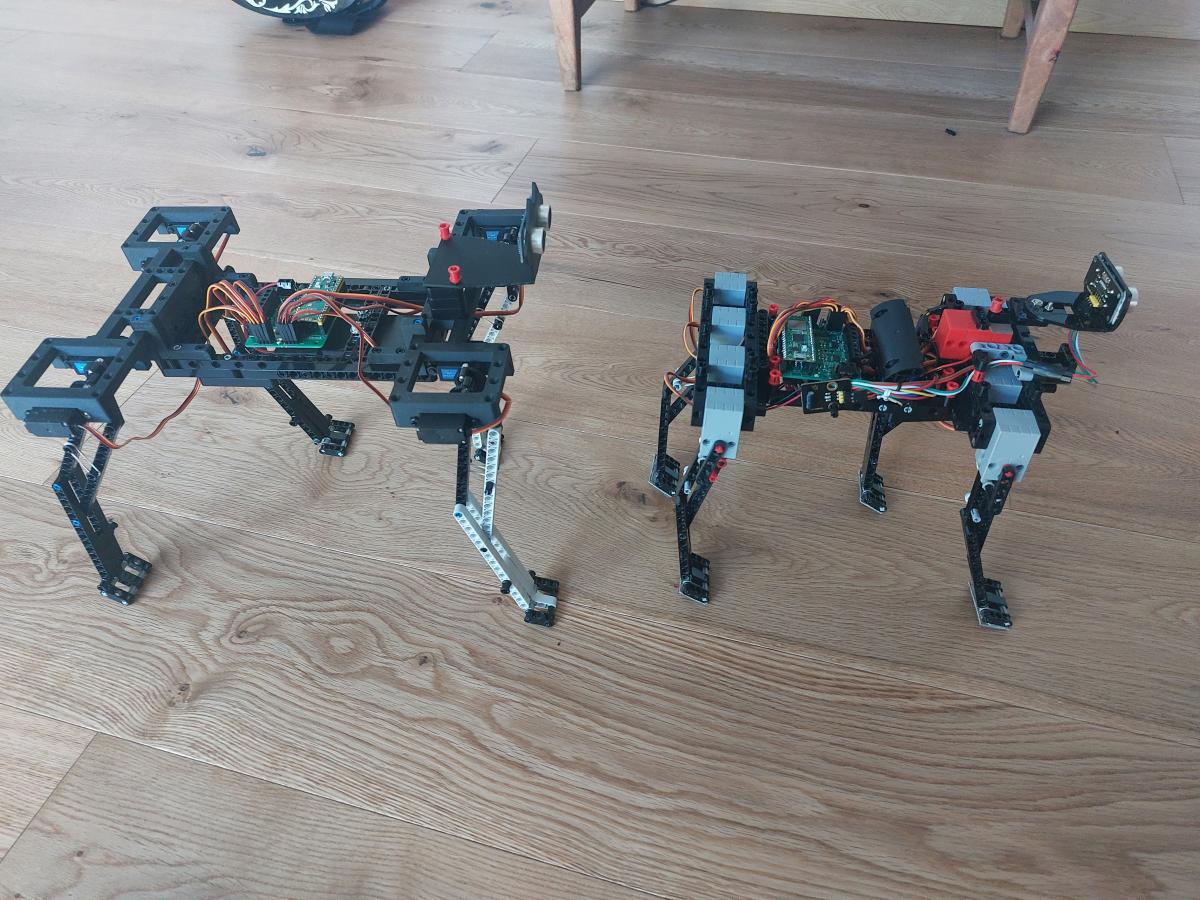
Mais avec mon nouveau jouet, mon imprimante 3S Bambou P1S, je me suis lancé dans la conception de Jag'Bot II, qui me permet de me faire la main sur cette imprimante 3D.
L'idée est de faire un quadrupède légèrement plus grand mais en utilisant des servos de 20g max, de façon à rester léger et viser 600/700g pour la bête. Il faut donc que je trouve les servos de cette taille les plus performants, pour l'instant j'ai des 6kg, 0.12s/60° et en commande des 7kg 0.06s/60° sous 8.4V.
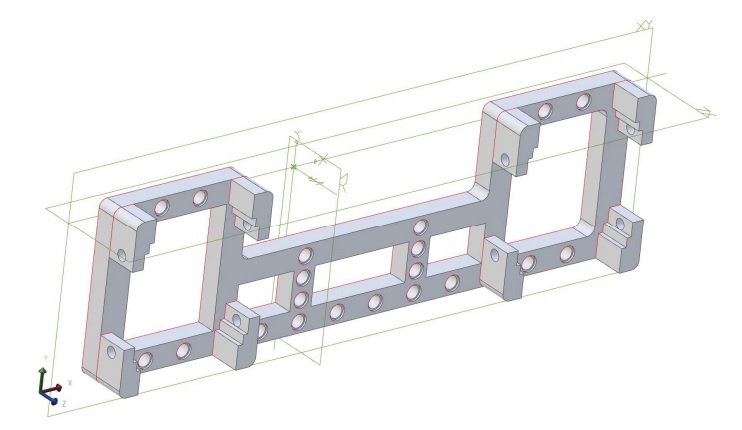
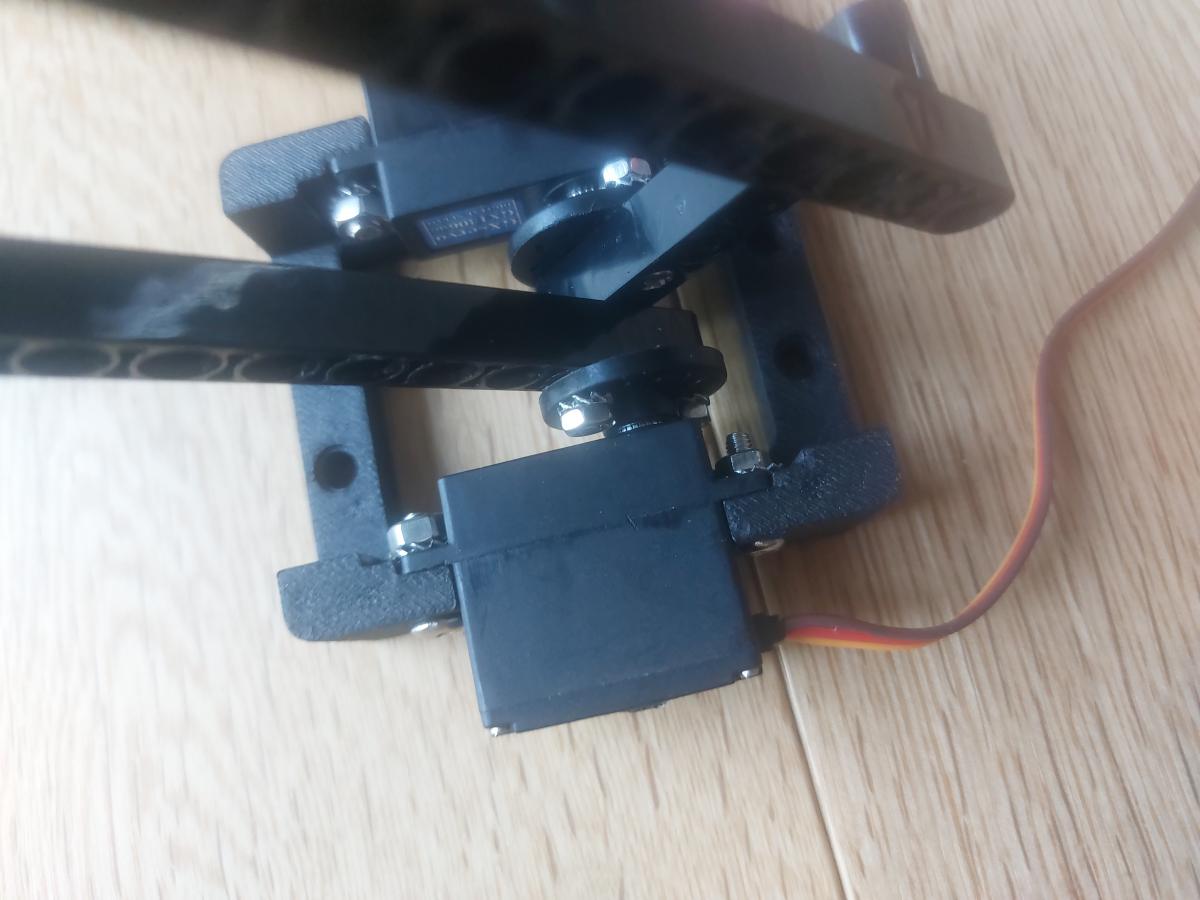
J'ai donc dessiné une pièce support d'un train de 2 pattes compatibles lego, en gardant le principe de Jag'Bot I, avec les servos fémur et tibia coaxiaux. J'ai même mis une liaison libre commune aux 2 servos pour assurer cette coaxalité
Même si je veux tester mon imprimante 3D, l'idée est de conserver les légos. Le train que j'ai dessiné est donc compatible légo. Je suis impressionné par le résultat, même le lamage des trous lego est nickel, mais aussi les trous perpendiculaires ce que je ne pensais pas être possible. Voici le dessin de la pièce :
A priori les dimensions de Jag'Bot II seront de 21 cm sol axe des pattes (16 pour Jag'Bot I), 16cm de largeur entre les axes des pattes (100 pour Jag Bot'I)
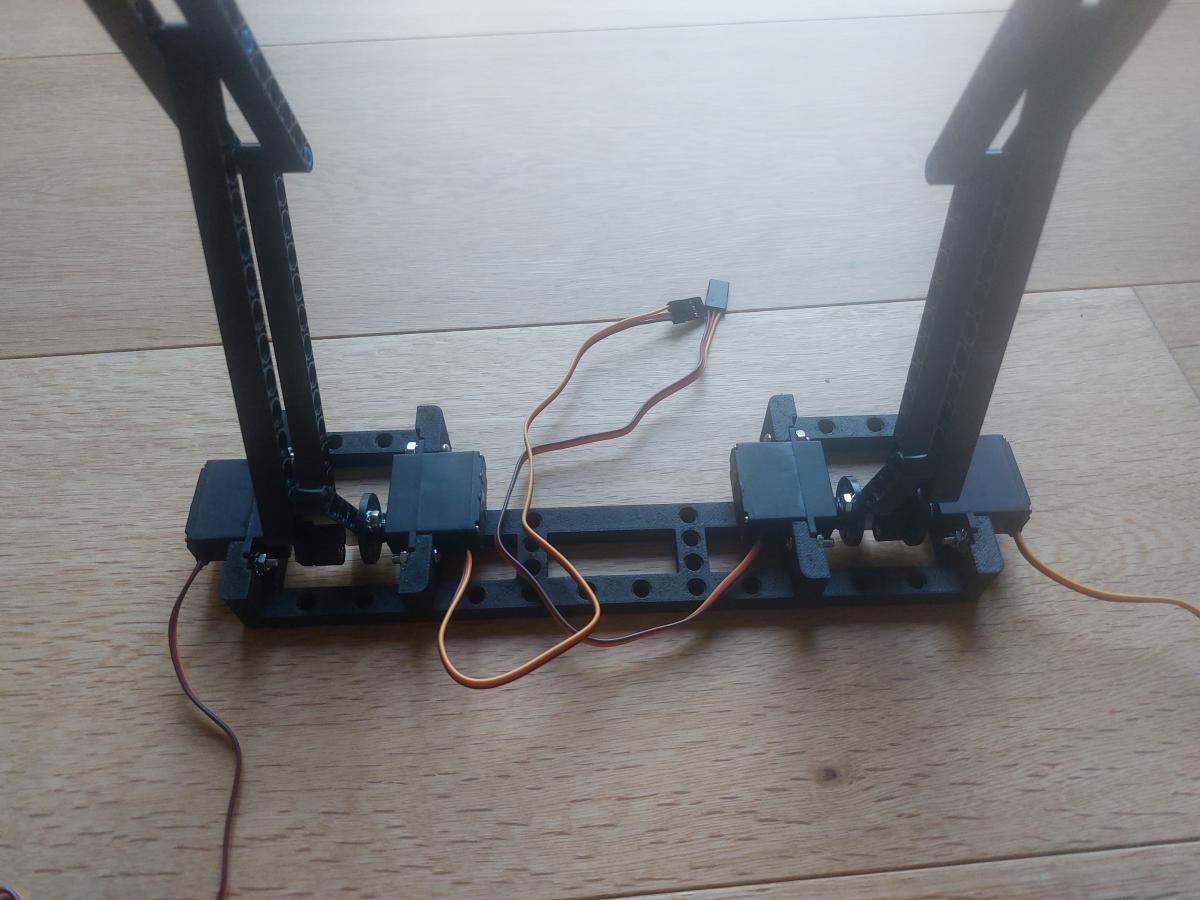
Voilà le premier montage, évidemment il va évoluer, mais le train de pattes me semble très rigide et assez minimaliste. Il pèse au total 184 g (170g avec les futures vis nylon)
A voir au niveau des pattes mais je voudrais rester par principe en lego. je pense malgré tout qu'il va falloir que je rigidifie.



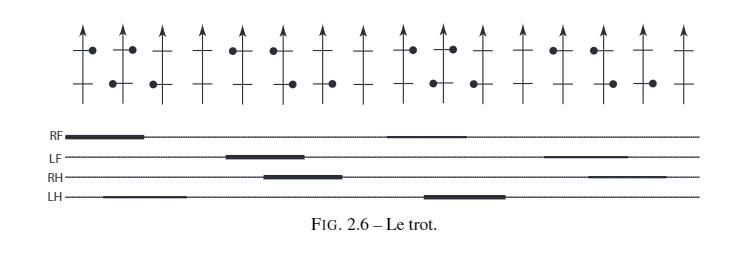
 Aucune allure dissymétrique n'a donné de résultat, ce qui est normal compte tenu que les quadrupèdes "vivants" compensent avec leur muscles, en particulier dorsaux, les déséquilibres. De plus les phases de suspension ne sont que théoriques, mes servos sont beaucoup trop faibles pour donner des impulsions. J'espérais que le canter donne des résultats , mais non.
Aucune allure dissymétrique n'a donné de résultat, ce qui est normal compte tenu que les quadrupèdes "vivants" compensent avec leur muscles, en particulier dorsaux, les déséquilibres. De plus les phases de suspension ne sont que théoriques, mes servos sont beaucoup trop faibles pour donner des impulsions. J'espérais que le canter donne des résultats , mais non. . J'ai fait des simulations en "lançant" Jag'Bot I, c'est prometteur , mais je n'ai pas la solution concernant l'incompatibilité du revêtement des pieds.
. J'ai fait des simulations en "lançant" Jag'Bot I, c'est prometteur , mais je n'ai pas la solution concernant l'incompatibilité du revêtement des pieds.