Je vois que tu maitrises parfaitement le sujet.
Il y a une donnée qui est incompressible, c'est la vitesse de réponse du servo. Peut-être as-tu atteint ce seuil ?
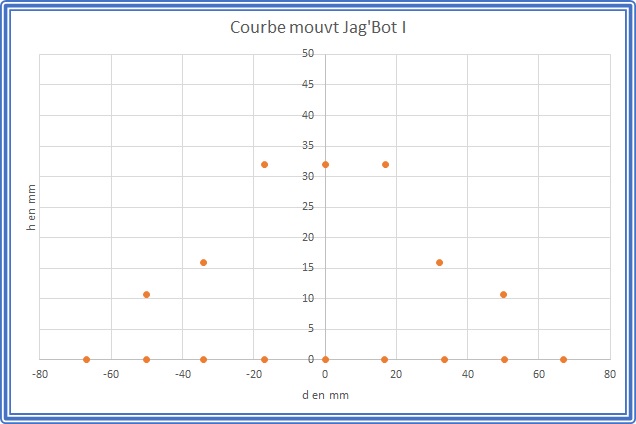
En conséquence, le seul moyen d'augmenter la vitesse, c'est d'allonger les pattes, pour que la foulée soit plus longue.
Bien entendu, cela a des conséquences. Le couple nécessaire sera plus élevé.
Si le servo ne suit pas, cela ne servira à rien.
Oui j'ai fait des essais au début avec des L13 au lieu des L11, soit environ 16mm de plus mais ça ne passait pas. Avec un petit allégement du poids et une conception de pattes L12 (soit 8mm) de plus, à voir si ça peut apporter un plus.
Pour l'instant je le refais à l'identique au niveau des longueurs des fémurs et tibias.
J'ai terminé le re-styling. Il a fallu que pour la structure je passe au PETG, le PLA est trop fragile quand il n'y a pas beaucoup de matière, ce qui est le cas pour mon châssis que j'ai fait le plus léger possible :
Pour le châssis (corps + fixation des servos) je suis passé de 90g à 52g soit un gain de 38g
Pour la partie capteur + tête je suis passé de 60g à 34g soit un gain de 26g et donc 64g au total. C'est bien mais pas sûr que cela change beaucoup sa performance.
Hormis les barres de commande des tibia set fémurs que j'ai fait en 3D, je n'ai pas touché aux pattes que j'ai laissées en barres Lego et les pieds fixes en forme ellipse revêtus de mohair.
J'arrive au global à 504g... j'aurais pu gratter pour passer symboliquement sous les 500g, mais peu importe. J'ai conservé un servo pour la rotation de la tête , un détecteur US et un détecteur IR, ce que j'aurais pu supprimer.
J'ai aussi rapproché d'une épaisseur de barre lego les tibias et fémurs ce qui diminue le porte-à-faux et j'ai nettement amélioré la liaison libre coaxiale entre les deux (beaucoup mieux guidée et moins de jeu)
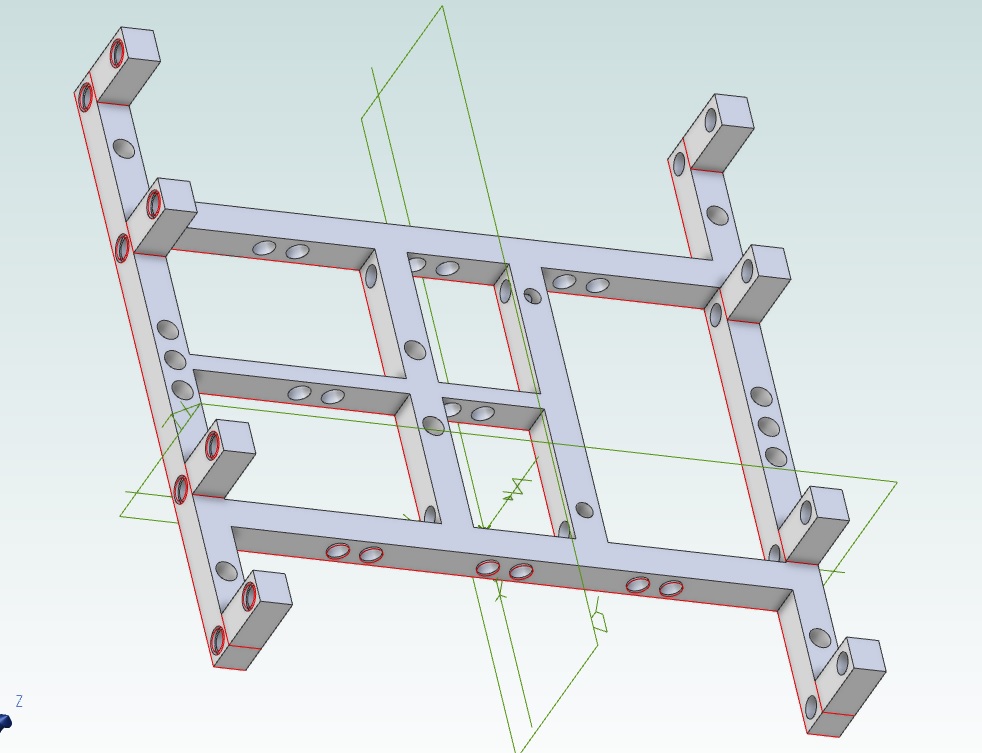
Voilà à quoi ressemble le châssis , j'ai perdu la possibilité de régler l'écartement entre les trains de pattes mais c'était le sacrifice à faire pour gagner en poids et rigidité.
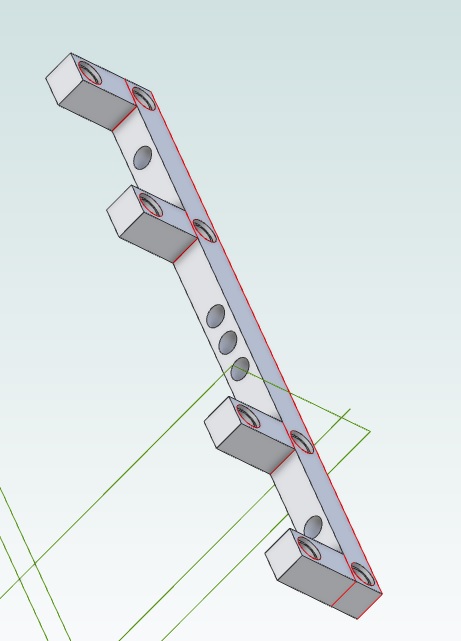
Et la partie (il y en 1 pour chaque train de pattes) qui vient serrer les servos qui sont fixés d'un côté au châssis :
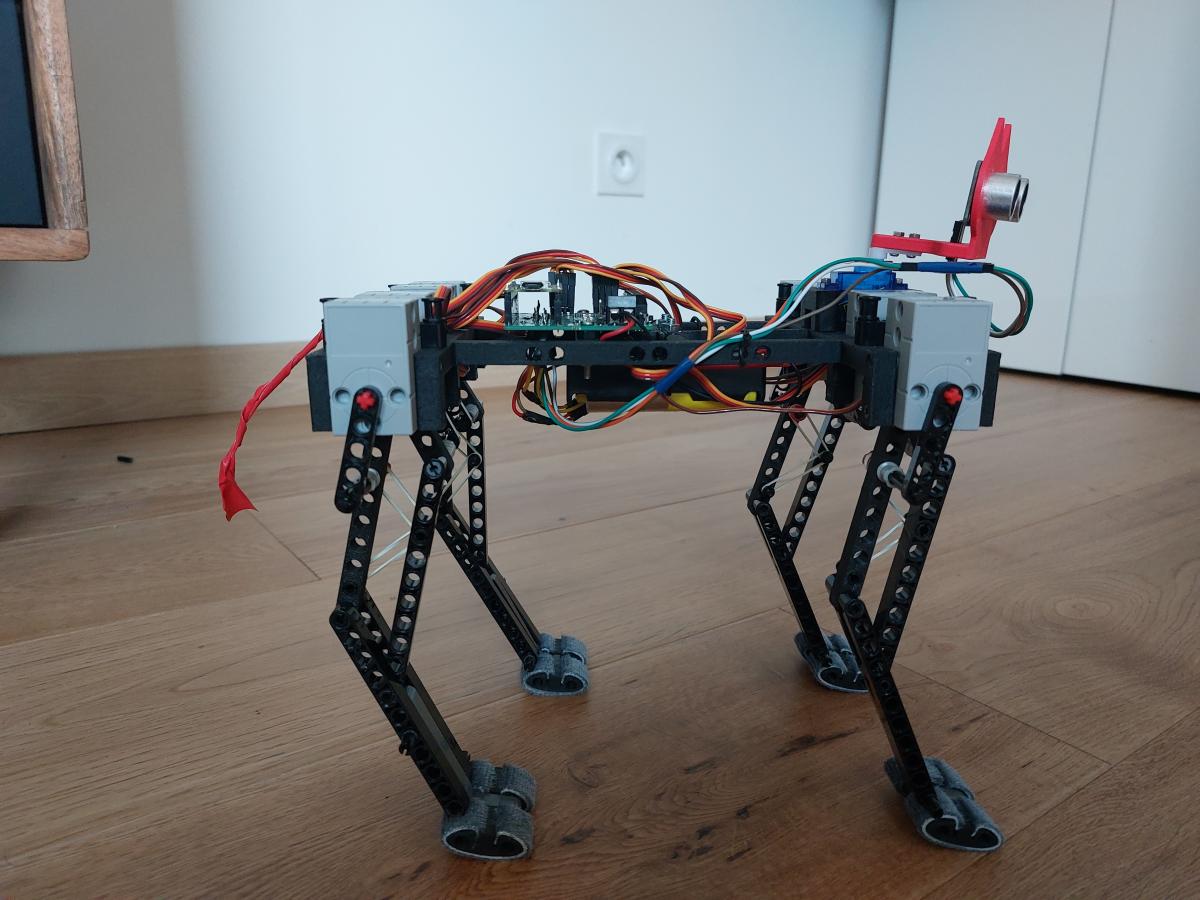
L'allure de Jag'Bot I restylé est sympa, j'ai rajouté une petite queue pour la finition  :
:

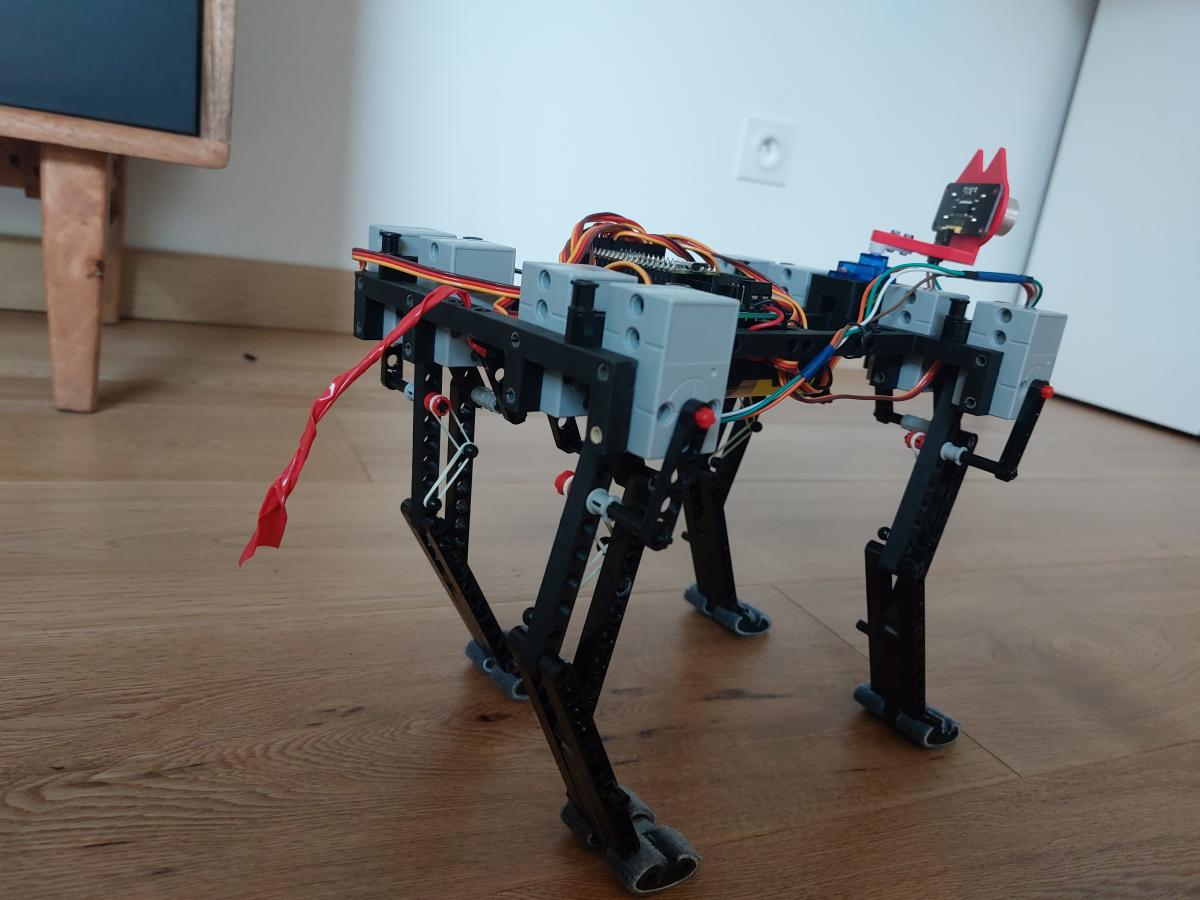
Pour rappel la version initiale de Jag'Bot I était celle-ci:

J'ai vérifié la calibration mais je n'ai fait aucun essai. A vrai dire j'ai aussi un peu peur d'avoir perdu en performance, Jag'Bot I était bien optimisé (je pense aux élastiques par exemple). Ensuite à voir si je parviens à faire mieux.
Mais ce travail de reconception est vraiment sympa même si c'est assez long.
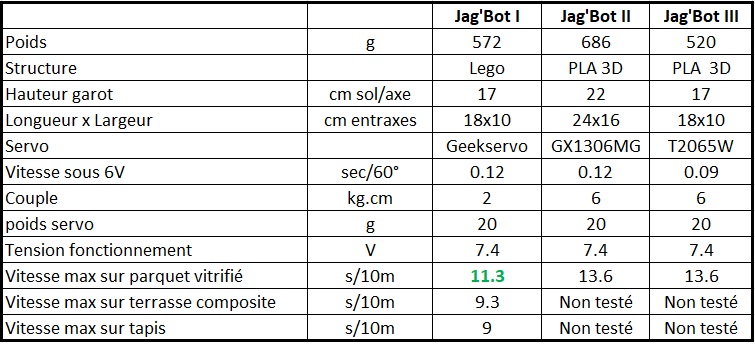
A suivre avec les essais ! Mon objectif ultime est 1m/s sur parquet vitrifié.






 , j'utilise beaucoup les verrouillages Lego entre les éléments, ils sont très légers et performants.
, j'utilise beaucoup les verrouillages Lego entre les éléments, ils sont très légers et performants.