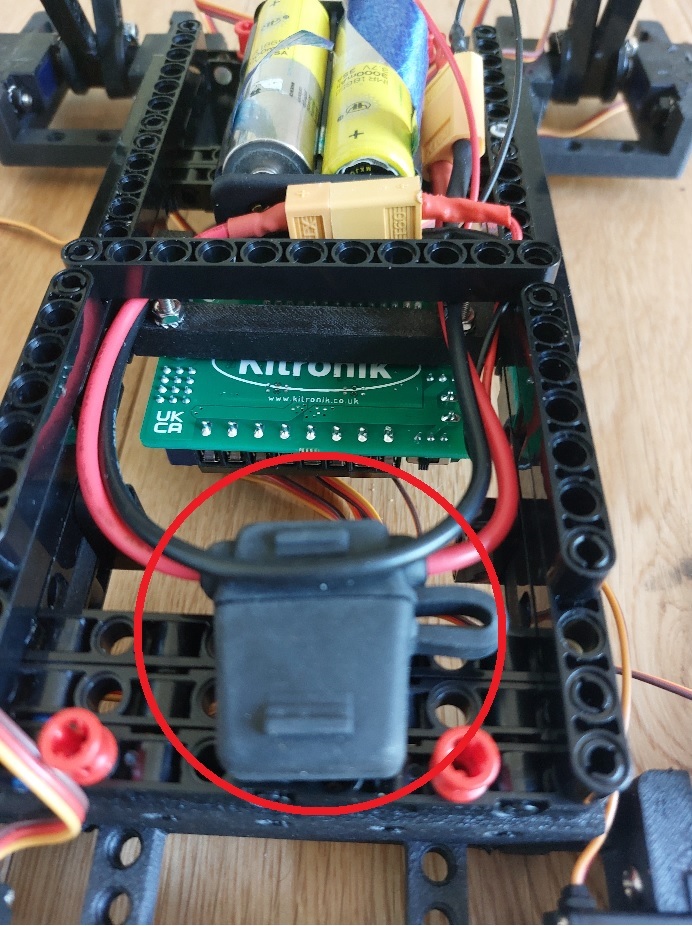
J'ai un Boomer avec des fusibles à 5A. Cela sautait très souvent. Du coup, j'ai soudé un pont aux cosses du fusible. J'ai honte . . . , je n'ai plus de protection.
Le Boomer est en série, il protège aussi bien les cartes que la batterie, mais ce qui est important, d'un point de vue sécurité, c'est la protection de la batterie qui pourrait exploser en cas de court circuit.
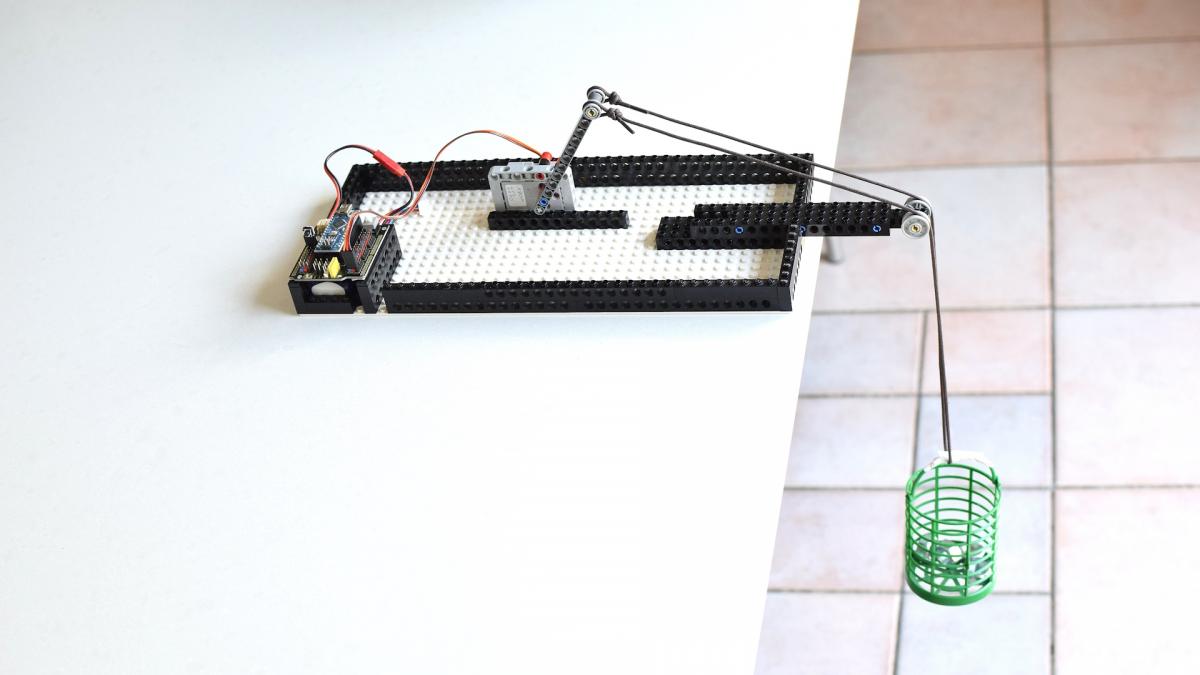
Pour 8 petits servos, je pense que 10A, c'est très bien.
Je sais ce que c'est qu'une carte I2C, mais je ne sais pas ce qu'est une carte PWM.
Oui, il faut paramétrer les servos. Sur Arduino, il y a une fonction spécifique, en Python, je ne sais pas.
Par exemple : s5.attach(5,550,2350);
Le servo 5 est connecté à la pin 5. La largeur d'impulsion pour le 0° est de 550µs et pour 180° de 2350µs. Alors, qu'en principe, elles devraient être de 500µs et 2500µs, pour mes servos.
Voici une vidéo qui montre tout cela, https://www.robot-ma...ammer/?p=115625
Oui en python sur le pico il y a une procédure spécifique que j'utilise pour l'étalonnage.
ce que j'appelle carte PWM est une carte classique qui utilise les signaux PWM pour piloter les servos.
Je ne sais pas trop quoi faire,, je vais peut-être mettre une protection ne sachant pas ce qu'il se passe. La réalité c'est que j'ai flingué 2 cartes et 1 pico.
J'ai un servo qui est beaucoup moins réactif que les autres . Là il y a possibilité de faire quelque chose ?