Cliquez moi.
Depuis que Patrick a montré qu'un grand quadrupède était faisable grâce à des servos de 40kg.cm, https://www.robot-ma...ur-la-trr-2023/, je n'ai eu qu'une seule idée en tête, c'est d'en faire un, moi même.
Il y a quelques temps, j'avais déjà fait une première tentative, mais malheureusement, les servos que j'ai utilisés n'étaient pas assez puissants, et j'ai laissé tomber. https://www.robot-ma...ruped/?p=114603
Le pire, c'est que j'avais les bons servos dans un tiroir. Aujourd'hui, grâce à ces servos, je devrais aboutir.
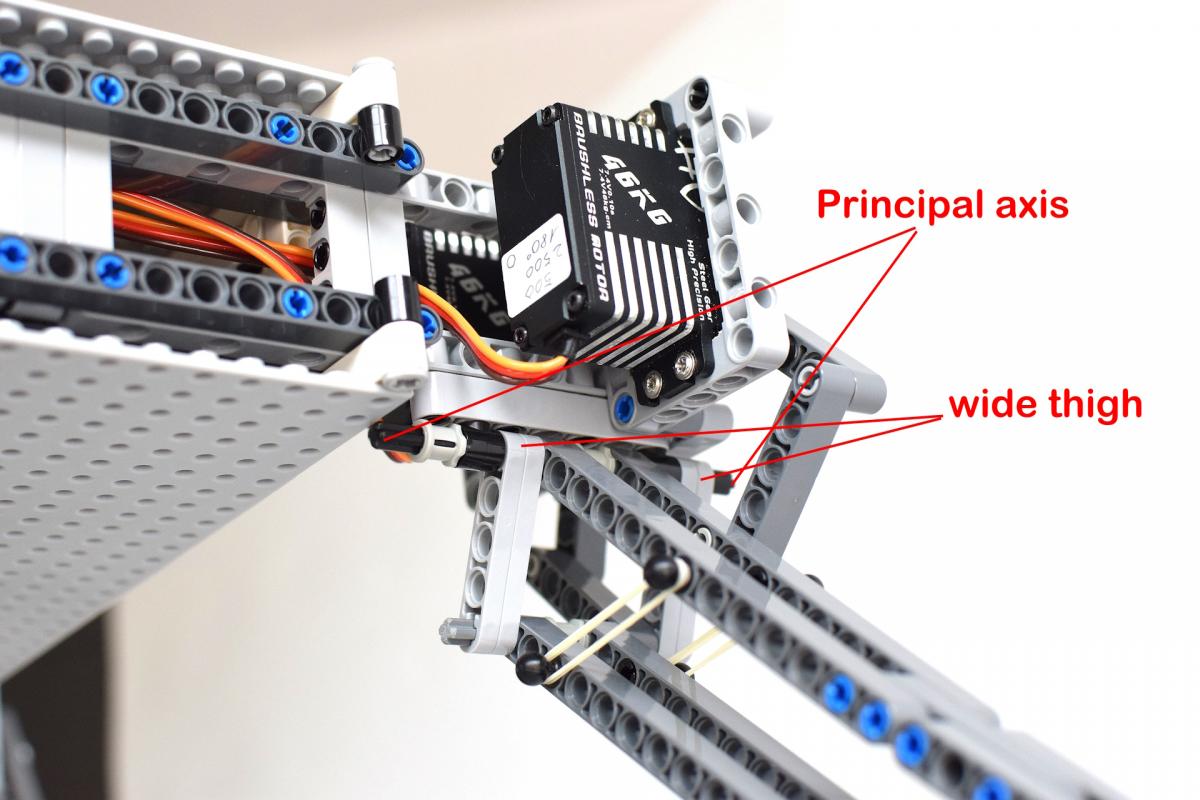
Les servos sont des JX BLS-HV7146MG, https://www.robot-ma...g-de-jx-46kgcm/
Ils sont très performants, avec un couple de 48kg.cm et une vitesse de 0.10s/60°. Le rêve ! Mais un rêve, cher . . .
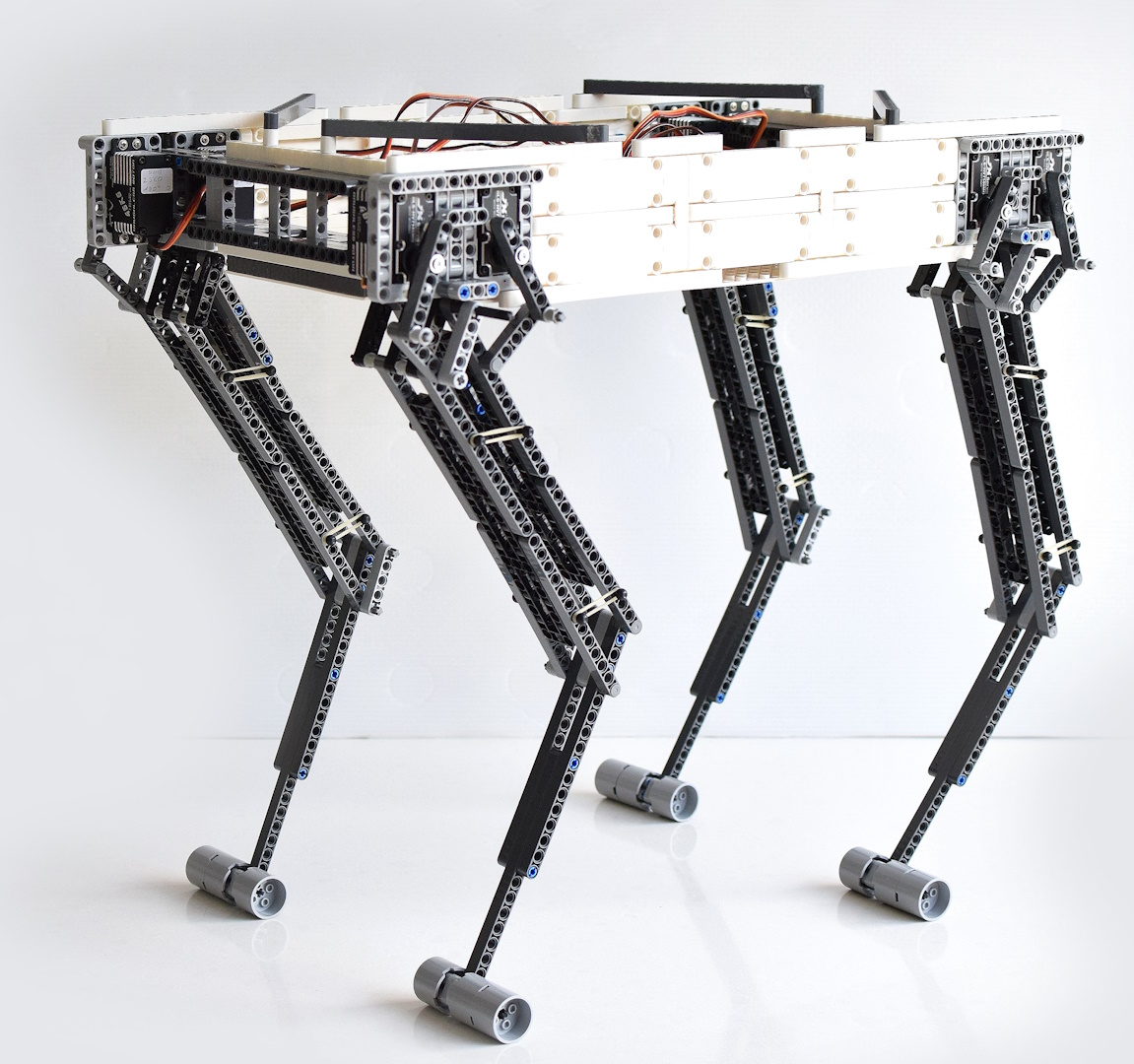
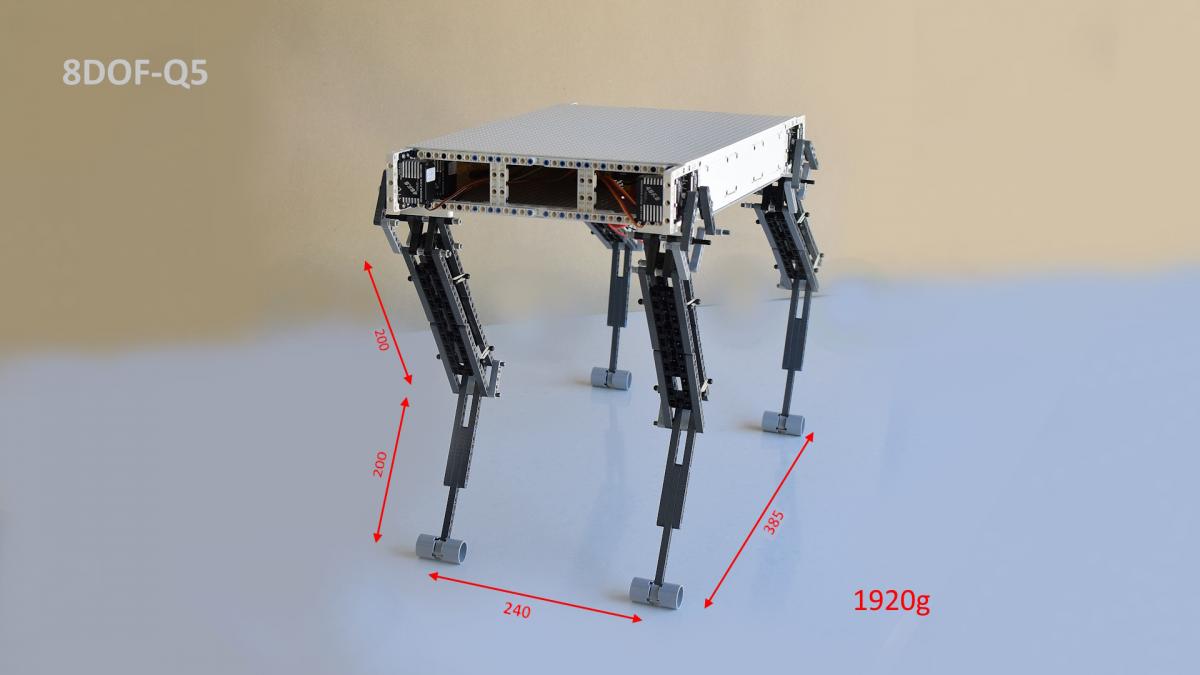
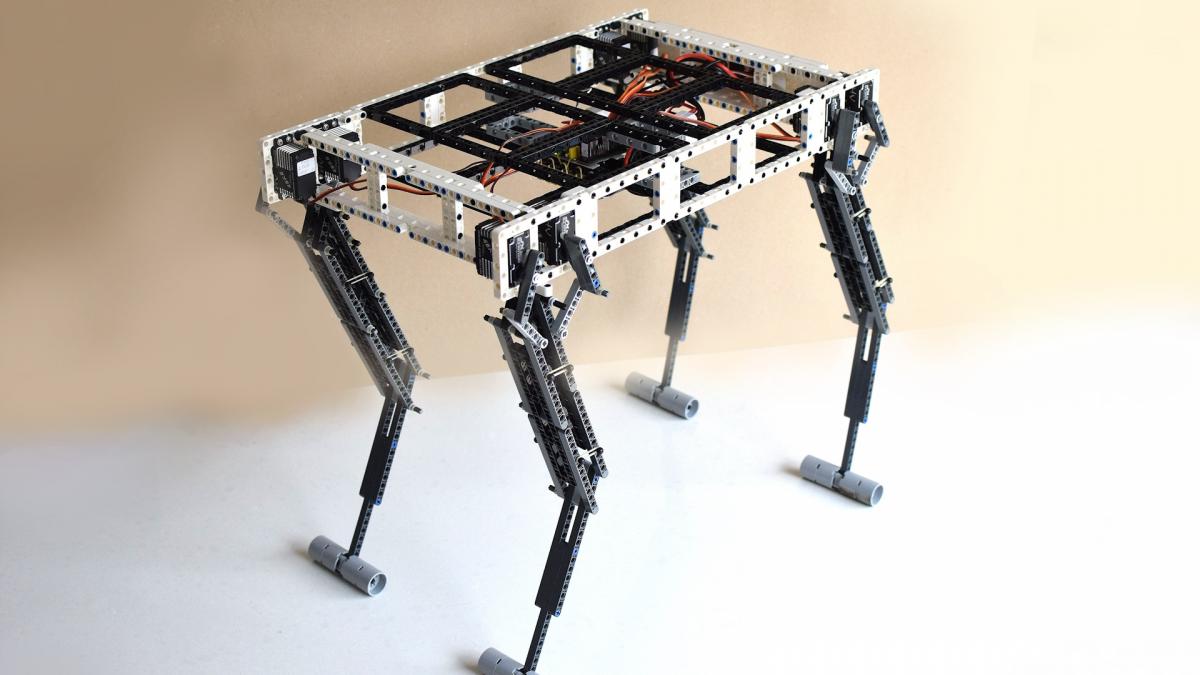
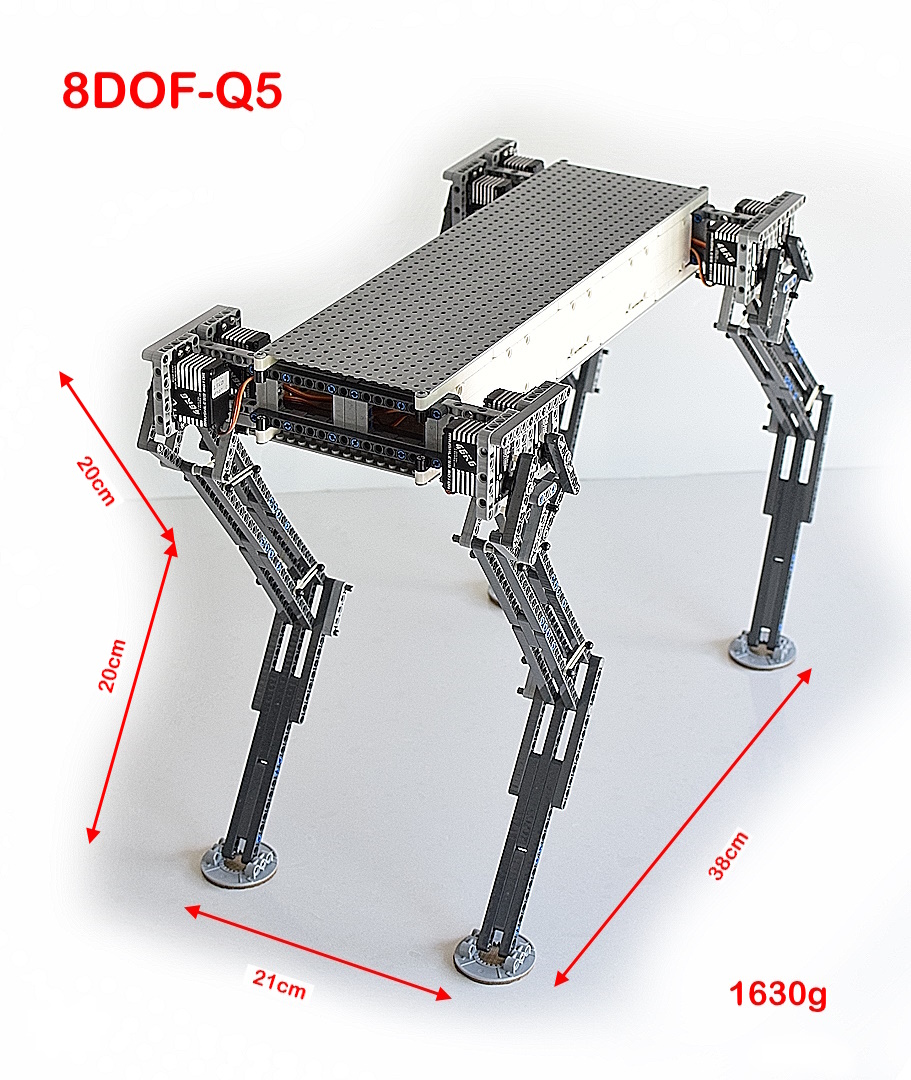
Le volume de 8DOF-Q5 est légèrement inférieur à celui de Félin, mais le fémur et le tibia sont identiques, à 20cm.
Néanmoins, il est légèrement plus lourd, 1630g contre 1464g pour Félin. Ma batterie fait 130g, mais elle est provisoire.
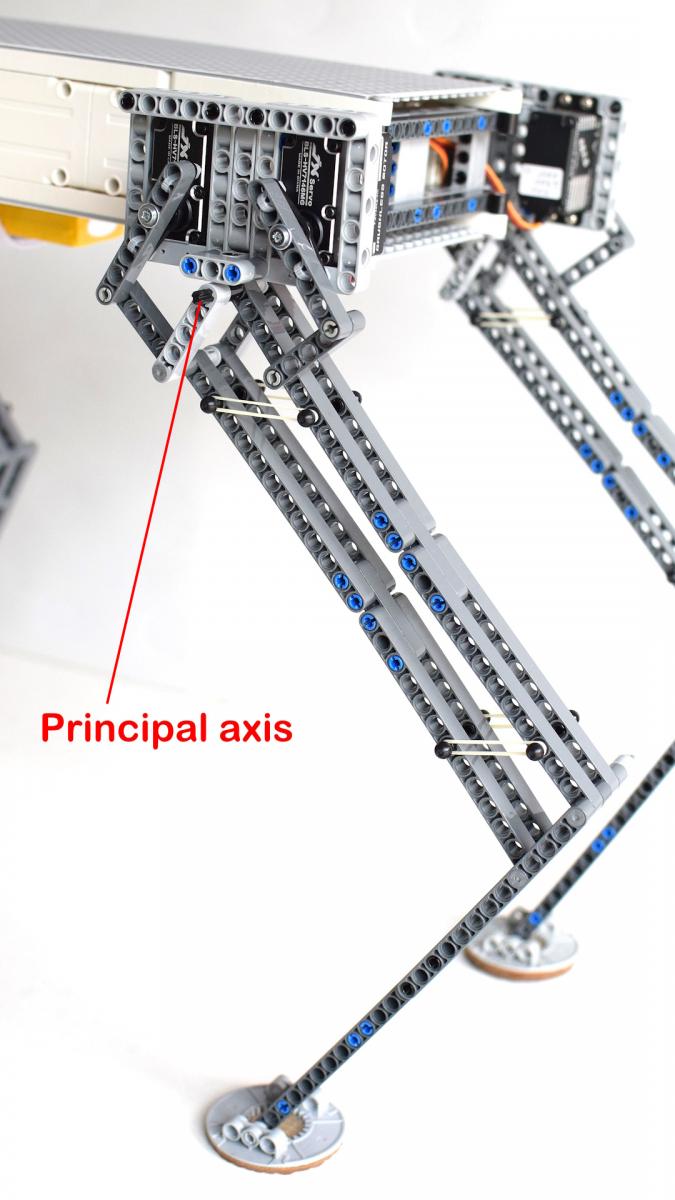
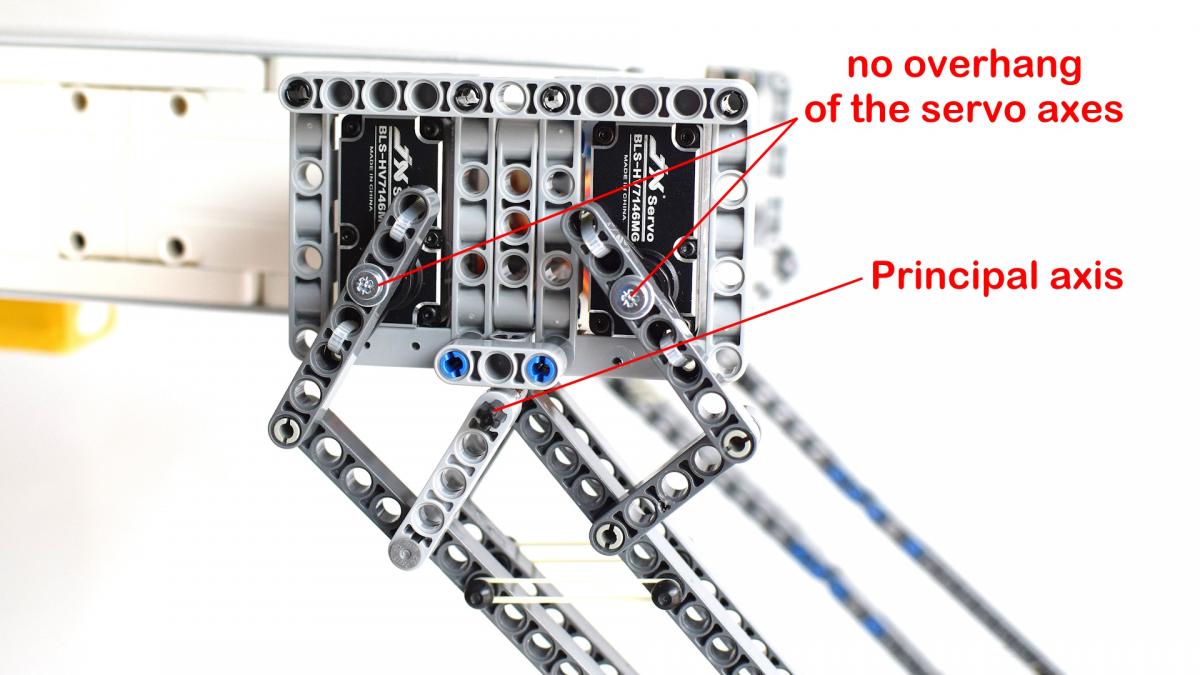
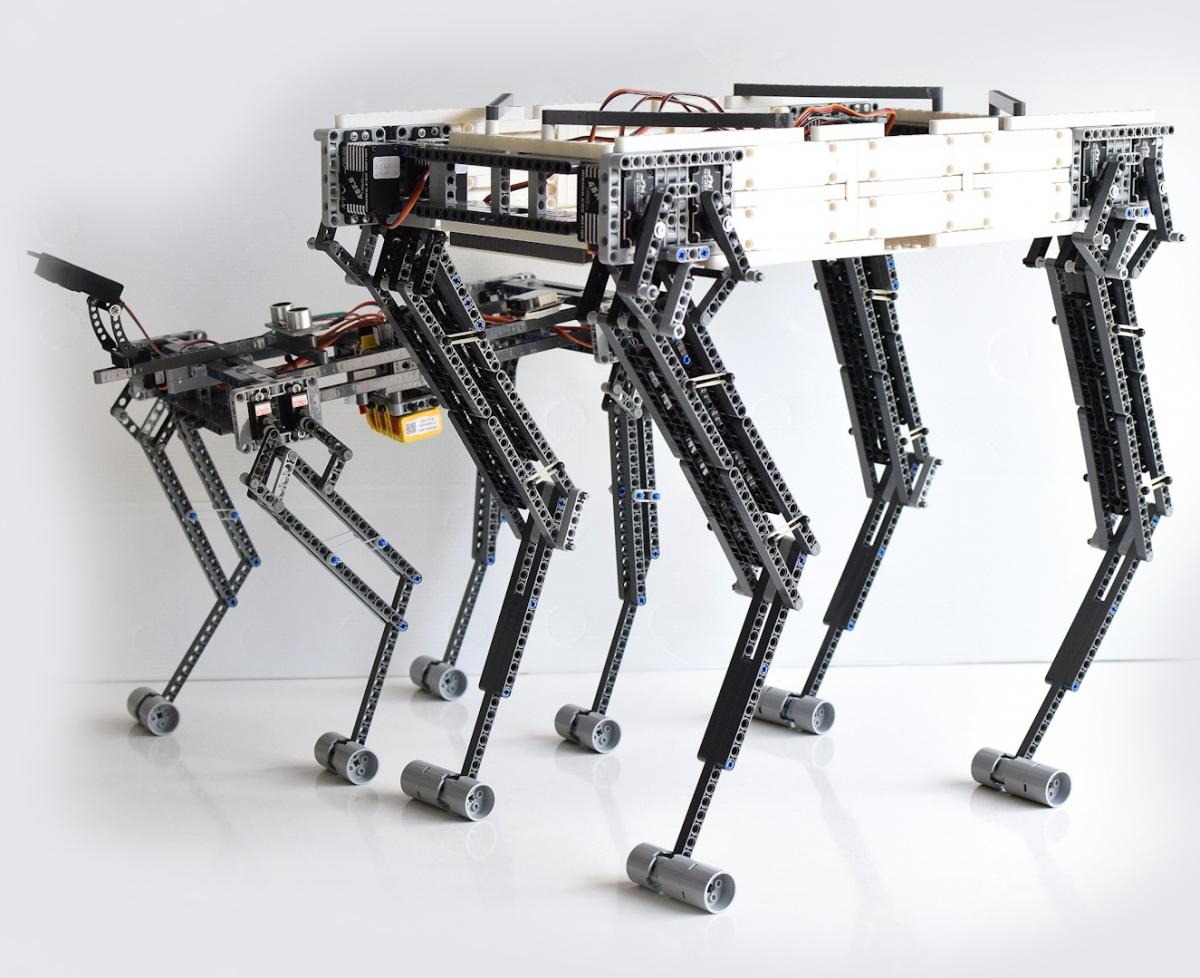
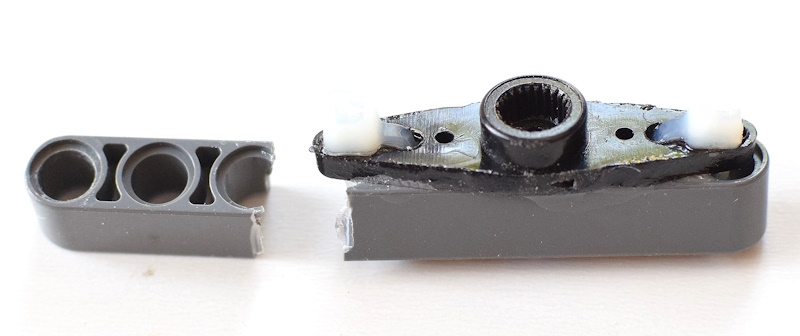
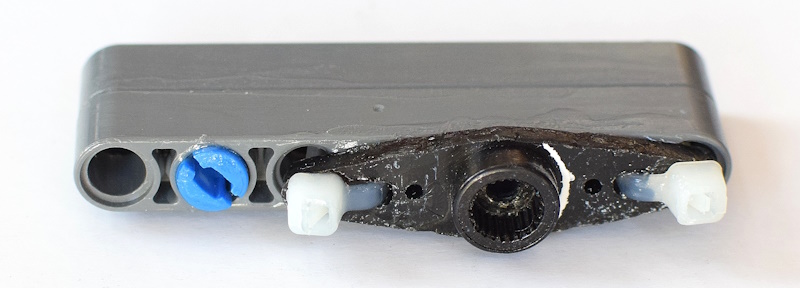
La structure et le mécanisme sont exactement les mêmes que mes précédents quadrupèdes.
Pour l'instant, je ne l'ai pas testé, mais cela ne saurait tarder.