J'ai eu moi aussi le plaisir de retrouver des concurrents du tournoi de la Tour du Pin, et cette fois comme concurrent!
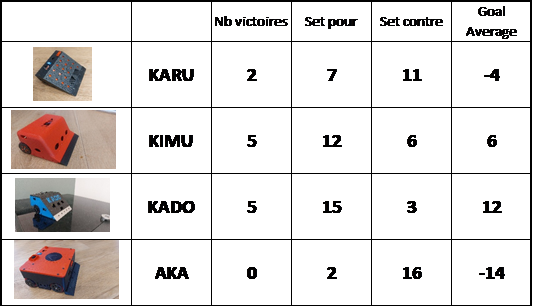
Pendant les phases de poules j'ai ressenti un sentiment bizarre quand j'ai vu Karu se faire éjecter à cause d'un départ non décrit dans le règlement. La chance l'a heureusement un peu aidé pour faire partie des 8 robots finalistes sur 19.
La suite du tournoi avec le rétablissement du départ prévu a été superbe avec des rencontres intéressantes.
Karu est très performant, il me semble qu'un point d'amélioration serait de déplacer le centre de gravité vers l'avant. Il a été soulevé par l'avant au moins 2 fois il me semble. Mais il y aurait moins d'adhérence côté pneus. Compliqué...!
De mon côté j'ai bien plus de marge de progression sur mon robot, quelle chance!
Karu est un superbe robot, bravo et encore bravo champion!
C'était un réel plaisir de retrouver @pmdd en étant du même côté de la barrière et j'espère que d'autres occasions se présenteront!

Oui @Gédé tu as raison, mais le problème est qu'il aussi important d'avoir du poids sur les roues pour l'adhérence. C'est ce qui est intéressant dans les mini-sumos, ce sont tous les paramètres à prendre en compte et qui sont souvent antinomiques.
Je pense que mes pneus hyper adhérents ont bien joué leur rôle parce que j'ai pu, comme la finale, gagner même en étant soulevé par l'avant.
Je voudrais le faire plus puissant et plus rapide mais cela est limité par les sorties de piste. Mon idée serait de mettre un frein électromagnétique mais la place disponible le permet difficilement.
Je viens de lire, comme tu me l'as dit, que certains ne mettaient pas de détecteurs de ligne et ne se basaient que sur la détection de l'adversaire pour le dégommer instantanément, comme le concurrent à la Tour du Pin , mais qui s'est fait prendre à son propre jeu. C'est une stratégie gonflée.









 robotique, j'avais fait un bricolage avec un petit tube percé d'un minuscule trou avec un morceau de calque à l'autre extrémité: j'avais bien une variation de lumière en approchant du blanc, mais ça m'aurait donné un capteur trop encombrant... Je ne suis pas allé plus loin que cette évaluation.
robotique, j'avais fait un bricolage avec un petit tube percé d'un minuscule trou avec un morceau de calque à l'autre extrémité: j'avais bien une variation de lumière en approchant du blanc, mais ça m'aurait donné un capteur trop encombrant... Je ne suis pas allé plus loin que cette évaluation.