


Amuse toi bien et bonne chance.

Merci !
C'était vraiment un beau tournoi... voir mon commentaire ici
4ème sur 36 robots engagés ! 
Finalement j'ai engagé les 3 robots, Hayai en 3ème pour remplacer un forfait mais qui est tombé dans la poule de mon favori Hayoku et que j'ai donc éliminé... Hayai n'avait pas le niveau de préparation nécessaire, mais c'était cool de le voir combattre !
Tsuyoi et Hayoku ont fait le job... ils étaient un peu atypiques, Hayoku avec sa pelle amovible et Tsuyoi et Hayai avec leur 4 roues...
Hayoku a remporté tous ses combats jusqu'en 1/4 de finale, pour tomber sur un os, le futur vainqueur. Il a gagné ses combats rapidement grâce à son point fort la pelle, mais a perdu aussi à cause de son inertie à la déployer... J'avais anticipé ce point là par une stratégie insuffisante contre mon adversaire qui de plus était très bas et difficilement détectable.
Tsuyoi a terminé 4 ème !!! La plus mauvaise place pour un sportif, au pied du podium !!! La demi-finale a été serrée et j'ai commis une erreur de stratégie sur le premier round (je ne sais pas pourquoi j'ai décidé au dernier moment de changer une stratégie gagnante !) , score final 2-1...il n'a même pas démarré sur le 3ème round...dommage mais content quand même !!!
Tsuyoi était probablement l'un des plus puissants, on le voit en corps à corps dans la demi-finale, mais malheureusement beaucoup trop haut et donc un centre de gravité pas top et des capteurs positionnés aussi trop haut. C'était difficile d'avoir 4 gros moteurs qui prennent de la place, la batterie et de faire un robot bas. Je le savais, mais il a échoué de peu au pied de la finale, donc c'est cool quand même !
Voilà un exemple de combat... tous mes combats gagnés ou perdus ont été extrêmement brefs !
Et les 3 rounds de la demi-finale perdue...
Merci encore aux organisateurs et à l'année prochaine, j'ai déjà en tête les améliorations à apporter !



 Il va falloir trouver une autre solution!
Il va falloir trouver une autre solution!




 Je vais donc démarrer un tournoi de pré-qualification où chacun se rencontrera 2 fois en 2 manches gagnantes, dans les mêmes conditions que le concours.
Je vais donc démarrer un tournoi de pré-qualification où chacun se rencontrera 2 fois en 2 manches gagnantes, dans les mêmes conditions que le concours.


 - 60 matches de 3 sets au total , 24 par robot.
- 60 matches de 3 sets au total , 24 par robot.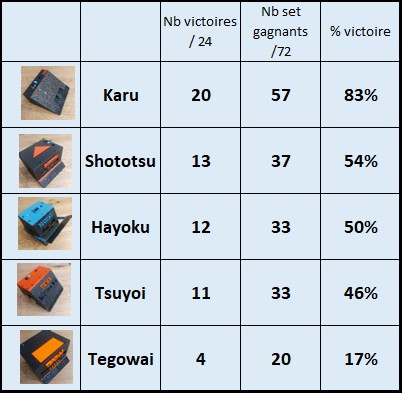




 Je t'en réserve un ou deux cartons ? x)
Je t'en réserve un ou deux cartons ? x)










