Hello everyone,
This year, I am participating again in the Coupe de France de Robotique, but this time, I'm starting with a new team composed of
pat92fr hdumcke (whom I both met during the TRR), and myself.
Pat chose the name Mars Attacks! in reference to the movie of the same name because the theme for the 2024 edition of the Coupe de France de Robotique is "Farming Mars," revealed in September 2023.
It's the first participation for pat92fr and hdumcke (yes, I roped them into this, but I promise they are willing participants and not being held hostage  ). Since it's their first time, we are starting a bit from scratch, but since we are not beginners in robotics, we're progressing quite well. As they are both in the Paris area and I'm in the south, near Biarritz, most of our sessions are conducted remotely, which can be a challenge, but we're managing quite well.
). Since it's their first time, we are starting a bit from scratch, but since we are not beginners in robotics, we're progressing quite well. As they are both in the Paris area and I'm in the south, near Biarritz, most of our sessions are conducted remotely, which can be a challenge, but we're managing quite well.
To provide a brief update on where we stand at the moment:
Mechanically:
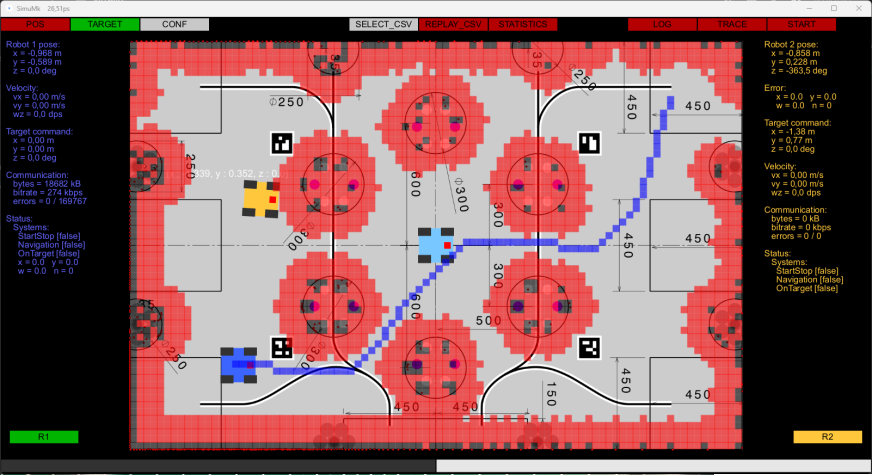
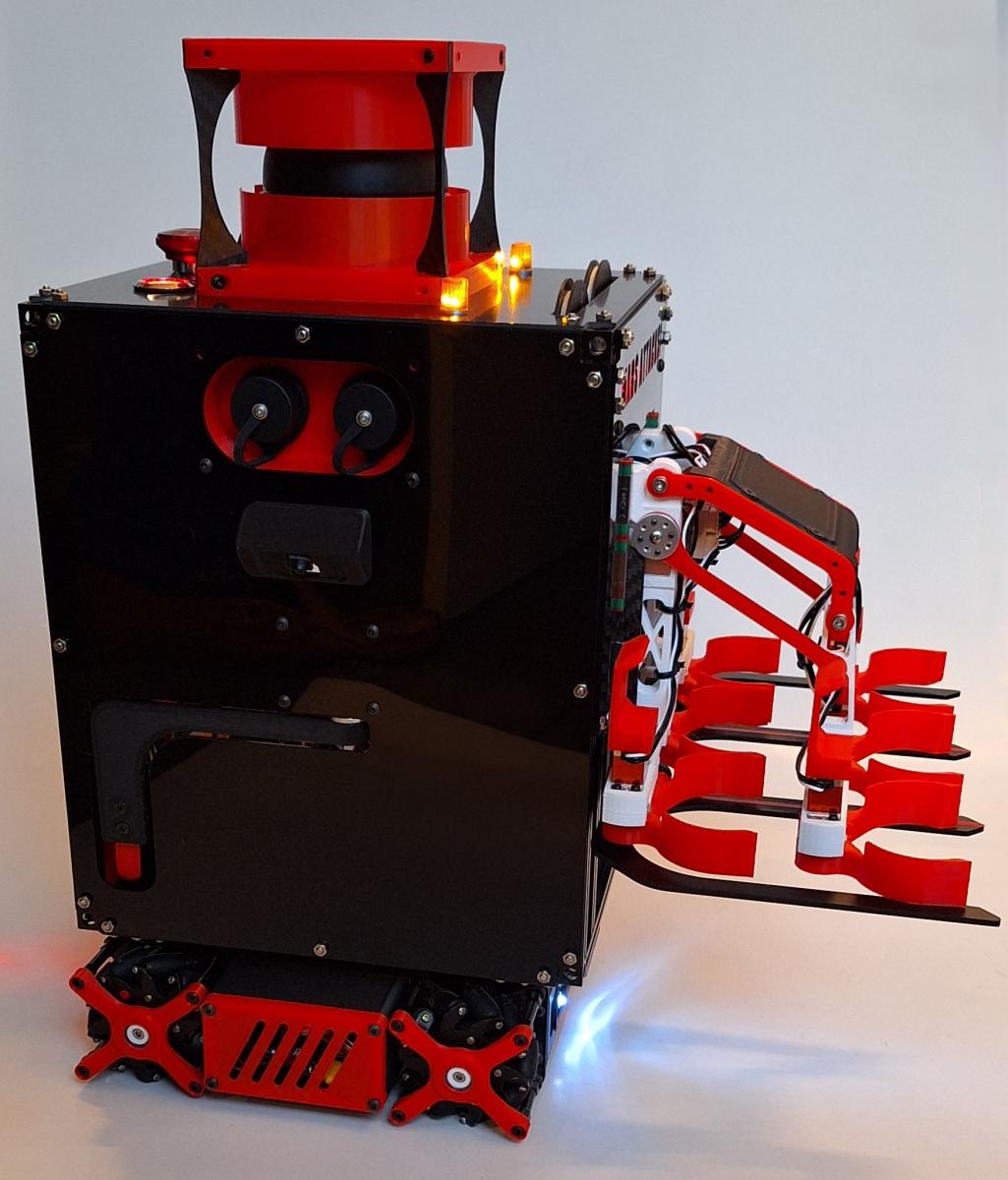
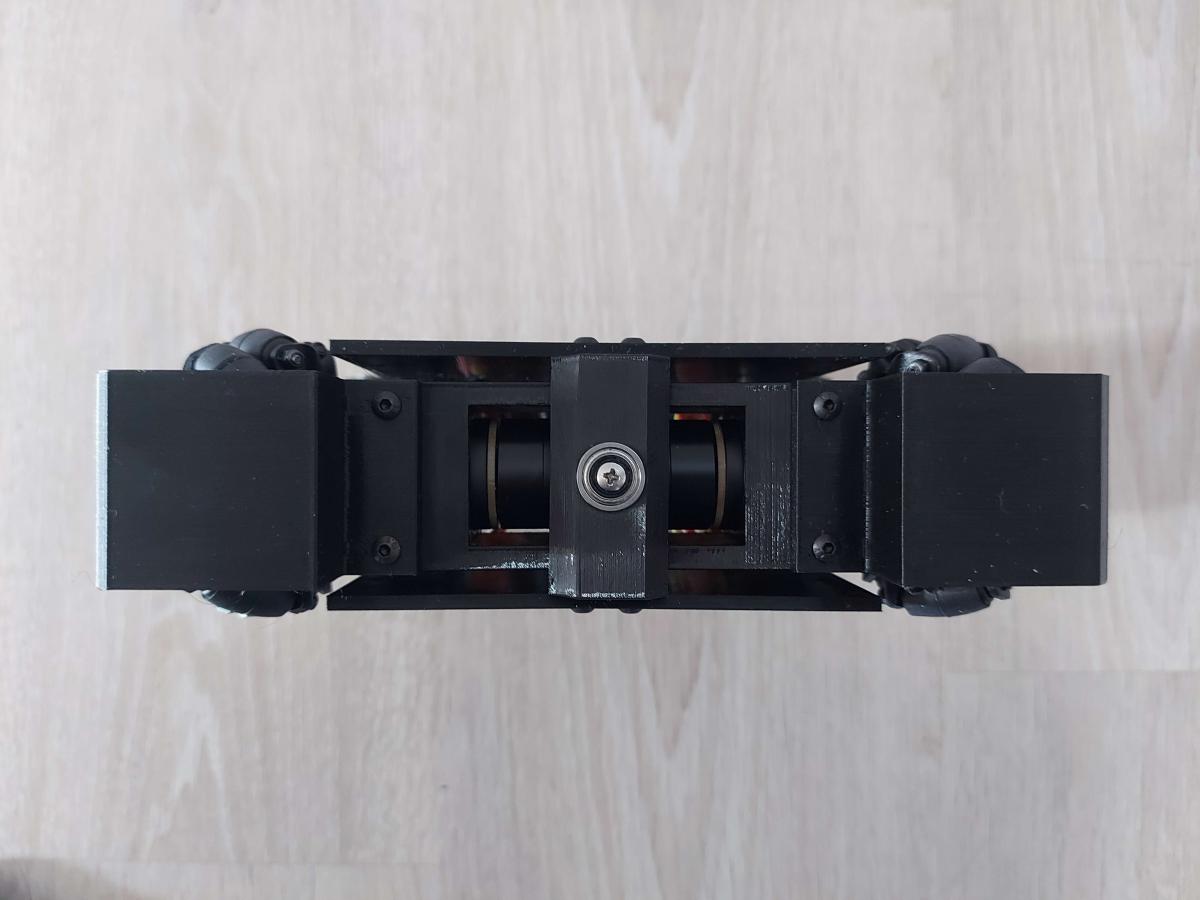
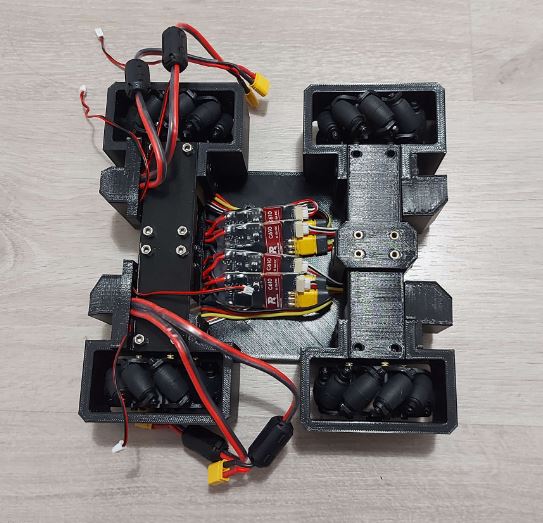
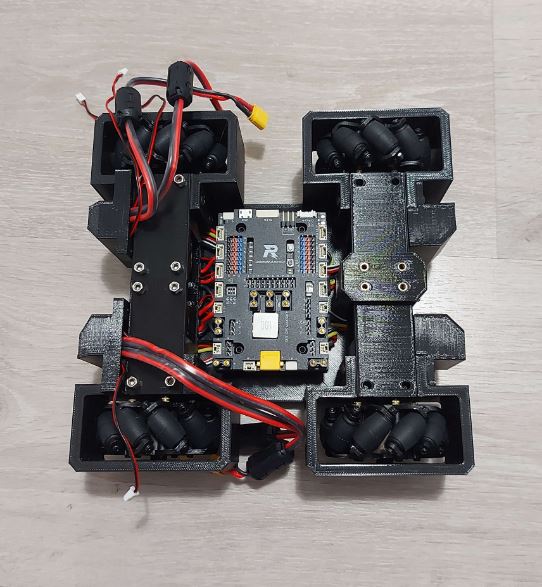
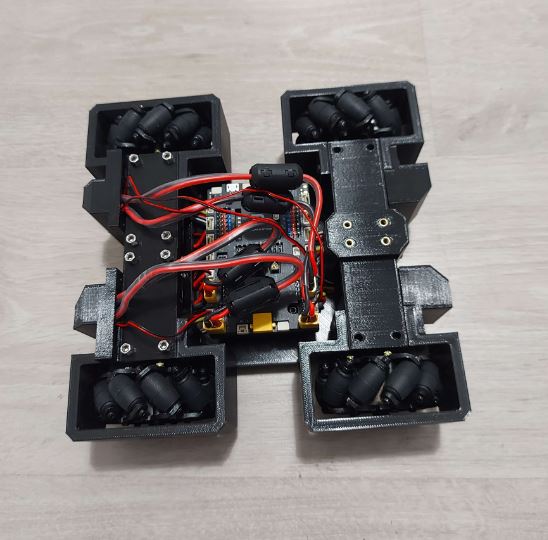
We are working on a mecanum base with a lidar positioned quite low to hit the table edges for localization (based on my experience with vigibot). Counter-axes are added at the wheel level in the protective fairing to relieve the motor reducers a bit. The front motor train is mounted on a pivot linkage to keep all four wheels in perfect contact with the ground.
Some photos:
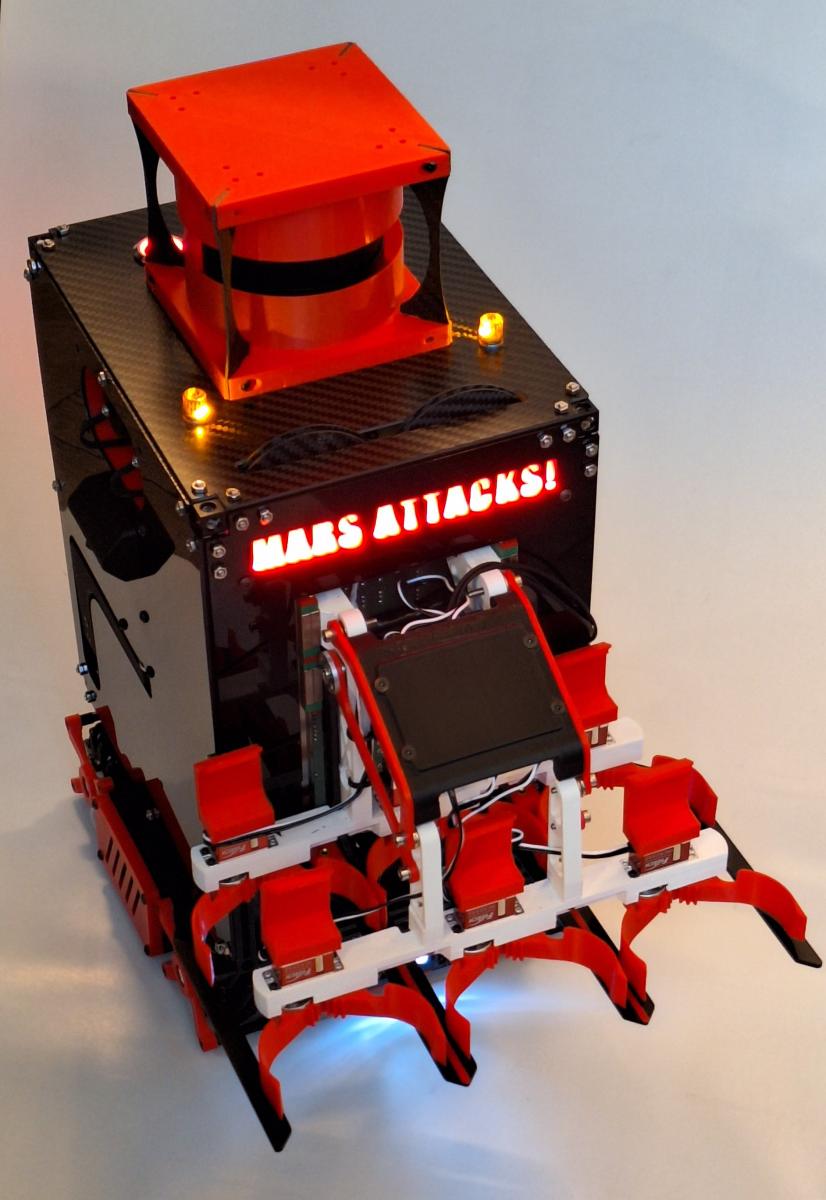
Assembled base from the top:

Assembled base from the front:
Highlight of the front train pivot without wheels:

Top view of the motor support integrating bearings and counter-axis in the wheel fairing:

Front view of the motor support integrating bearings and counter-axis in the wheel fairing:

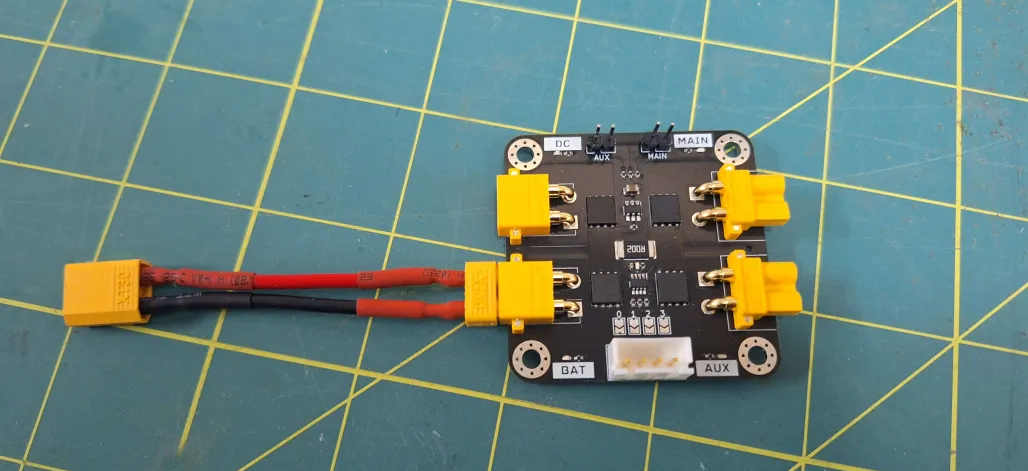
For this mecanum base, we are using:
Several 3D-printed parts (PETG), (the files will be shared) and plenty of screws and fasteners

We plan to publish a lot more, but we need to make progress first, so stay tuned for more soon!







 Are you driving all of the SLAM from the lidar? to include location and the orientation of the base?
Are you driving all of the SLAM from the lidar? to include location and the orientation of the base?