Bonsoir à tous
Après "naissance de mon quadrupède" et "naissance de mon sumo", voici la suite de la trilogie : naissance de mon suiveur de ligne... 
Bon ce projet n'est ni fou, ni original , ni spectaculaire, ni moderne... Mais en attendant de trouver "The Projet" , je me lance dans un suiveur de ligne un peu perfectionné pour continuer mon parcours d'apprentissage. Je ne sais pas si je vais trouver la même motivation que le quadrupède ou le sumo, qui étaient dictés par une échéance de compétition...on verra... j'en doute un peu.
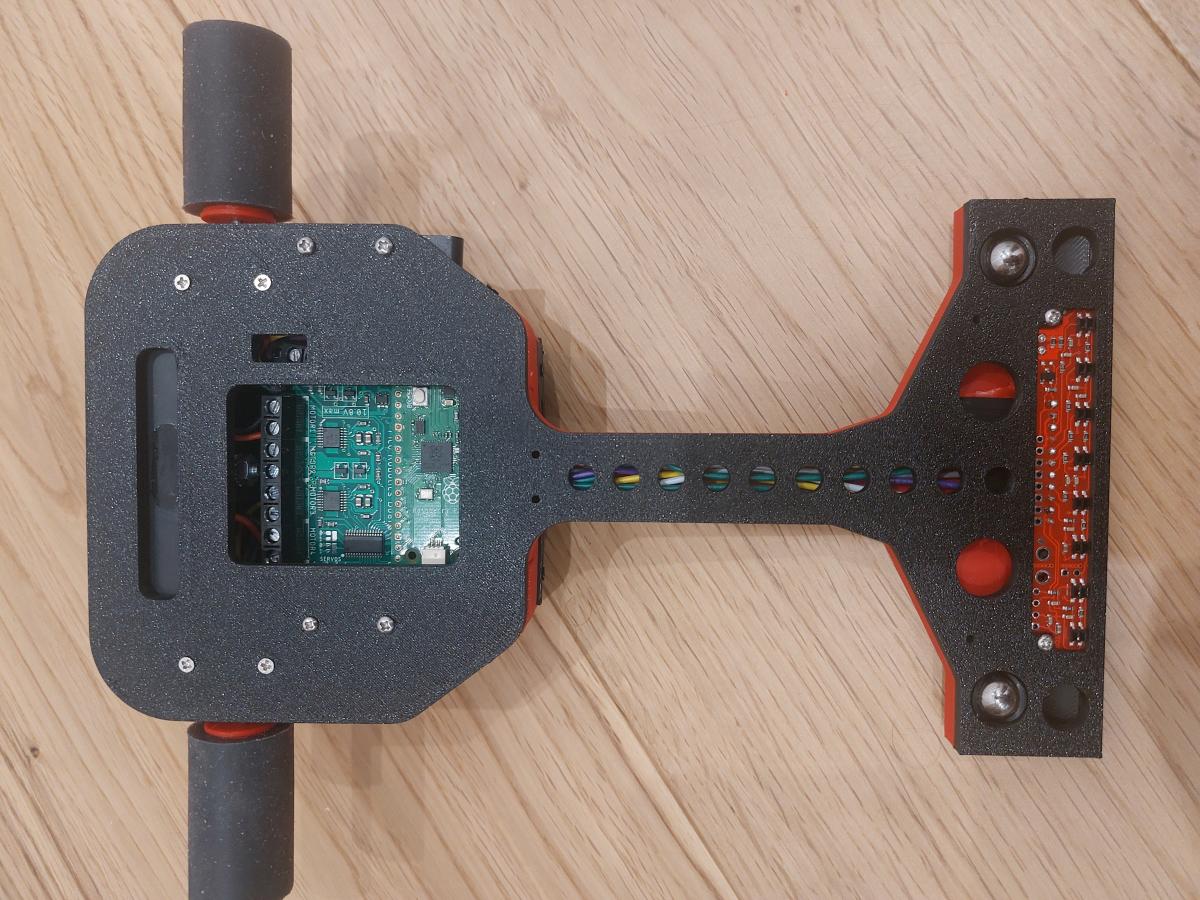
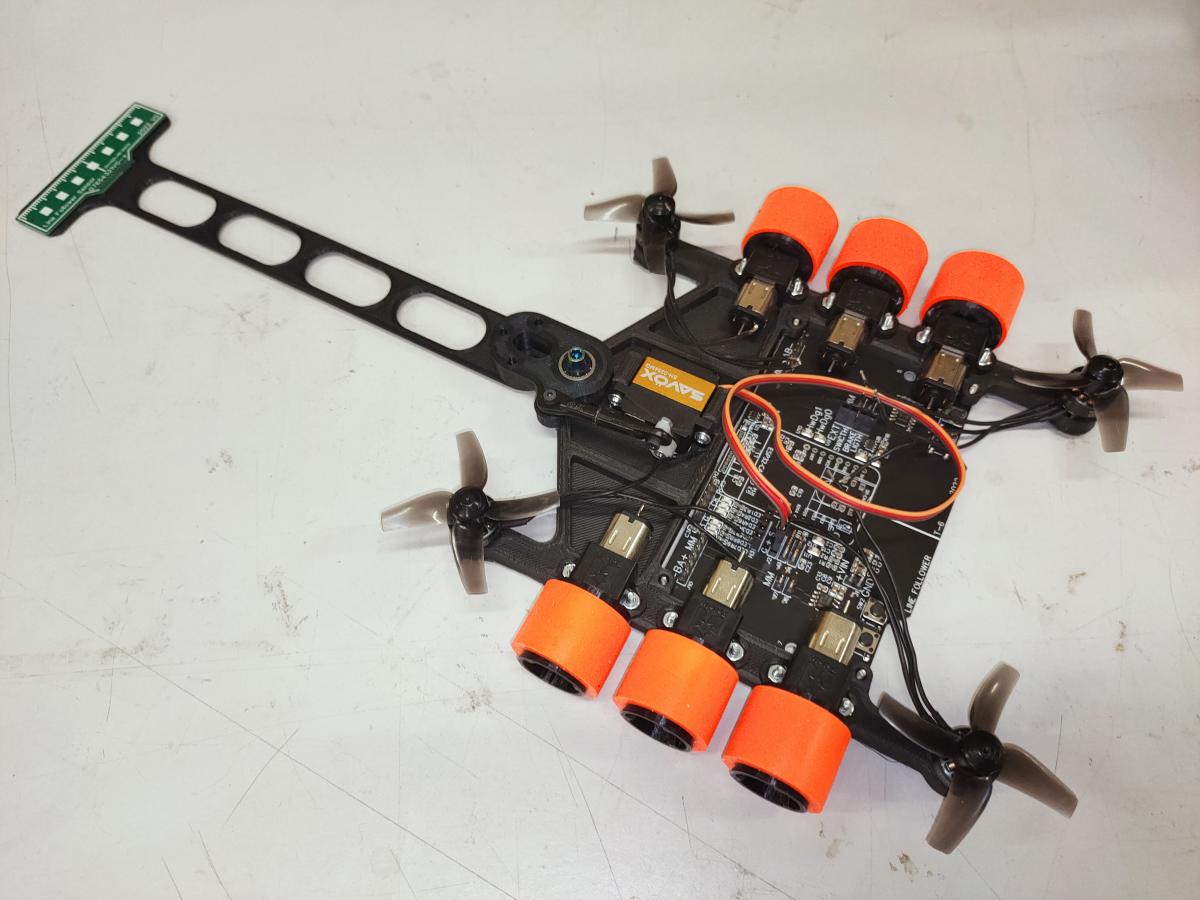
Mon suiveur de ligne est équipé de la façon suivante: 2 moteur de 3000 RPM, 2 roues maison en silicone shore 12 (hyper adhérent), 2 codeurs rotatifs avec bouton poussoir pour sélection menu et réglage des valeurs. 1 écran LCD, 8 capteurs de ligne, 2 roues folles...une batterie de 8.4V max , et le microcontrôleur PICO, au total 17 I/O utilisées...
L'idée est de redécouvrir le PID (40 ans après mon projet de fin d'étude), et de pouvoir faire la mise au point directement sur le véhicule. (ajustement des paramètres du PID, vitesse...)
Le robot avec ces roues va à 13 km/h et montre un démarrage très rapide. La piste fait environ 7m... Objectif <4s... mais aucune idée de la difficulté.
Rien d'original dans la forme du robot si ce n'est un soin particulier et atypique dans son look et du coup 100g de carter !!!. Mais je ne suis pas fan des robots nus...
20 cm de large, 22 cm de long, 390g (c'est beaucoup mais bon...)
Voilà le résultat, avant de me lancer dans la programmation et la mise au point :